


Handgebaargestuurde robot
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| × | 1 | ||||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 2 | |||
| × | 1 |
Apps en online services
 |
|
Over dit project
UPDATE:DE BIJGEWERKTE VERSIE VAN DIT PROJECT KAN HIER VINDEN
Inleiding
Ik wou dat ik alles met mijn handen kon besturen! Zittend in mijn stoel en dingen besturend als een BOSS. Ik zou het geweldig vinden! Dus kwam ik eindelijk uit met een coole DIY-robot voor handgebarenherkenning, die de opdrachten van handgebaren kan volgen. Klinkt gek, maar ik beloof dat het heel eenvoudig is. Het maken van een robot voor gebarenbesturing is eigenlijk heel eenvoudig. Deze robot is een verbetering van mijn andere RC-auto voor doe-het-zelvers met een RF-module.
Ook hier is de robot opgedeeld in twee delen, zender en ontvanger. Het ontvangercircuit is hetzelfde als dat van de oude post en er is slechts een kleine verandering in het zendercircuit, hier moeten we het zendercircuit programmeren. Dus ik zal een Arduino gebruiken als programmeerplatform. Om de gemaakte gebaren te herkennen, zal ik een versnellingsmetersensor gebruiken. Dus laten we beginnen met bouwen!
Bekijk de robot in actie
Wat is dat en hoe werkt het?
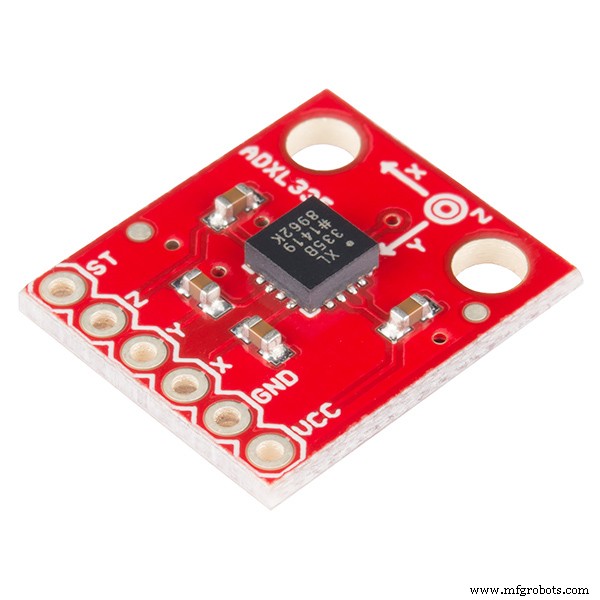
Wat is een versnellingsmeter (ADXL335)?
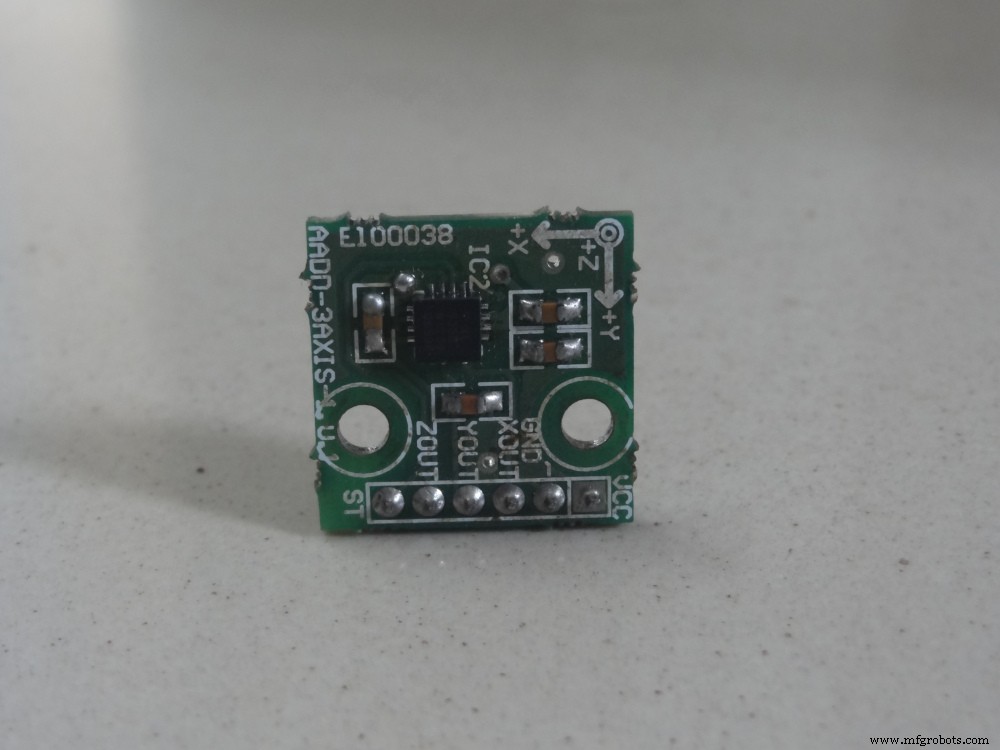
Kort gezegd is een versnellingsmeter een versnellingsmeter met drie assen. De accelerometer die hier wordt gebruikt, is ADXL335 en heeft 3 assen (X Y Z).
Bijna alle smartphones hebben tegenwoordig versnellingsmeters (ook al gaan we die niet van een smartphone overnemen). Je hebt zeker bewegingsgames gespeeld op je mobiel (bijv. Temple Run) waarbij het personage in de game naar links en rechts beweegt wanneer je je telefoon respectievelijk naar links en rechts kantelt, dit wordt gedaan door de versnellingsmeter.
Er is nog een sensor genaamd Gyroscope gevonden in de smartphone die we nu niet nodig hebben.
Hoe werkt het en herken je de gebaren?
Hier is het brein van de robot Arduino Uno (Atmega32), het wordt gevoed met een aantal code. De gebaren/bewegingen die met de hand worden gemaakt, worden herkend door een versnellingsmeetapparaat genaamd accelerometer (ADXL335).
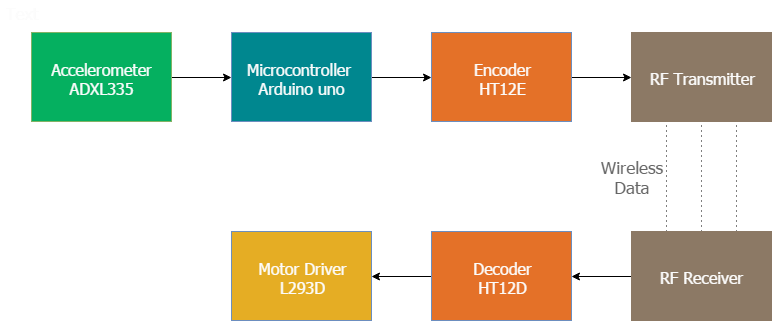
Hier leest de versnellingsmeter de X Y Z-coördinaten wanneer we met de hand gebaren maken en de X Y Z-coördinaten naar de Arduino sturen (hier hebben we de Z-as niet nodig, we hebben slechts twee gecoördineerde X en Y nodig. Dus negeer de Z-coördinaat). De Arduino controleert de waarden van coördinaten en stuurt een 4-bits code naar het Encoder IC. De encoder geeft de gegevens door aan de zender en de verzonden gegevens worden ontvangen door de RF-ontvanger. De ontvanger stuurt de 4-bits code naar de Decoder IC en de decoder geeft deze door aan Motor Driver IC. Later neemt de motorbestuurder de beslissing om de twee motoren in de gewenste richting te draaien.
Maak de voeding
Eerst beginnen we met het voedingscircuit. We hebben twee voedingscircuits nodig:een voor de zender en een voor de ontvanger. Het ontvangercircuit moet worden gevoed met 12V-voeding (aangezien ik een 12V-motor gebruik) en het zendercircuit kan worden gevoed met een 9V-batterij.
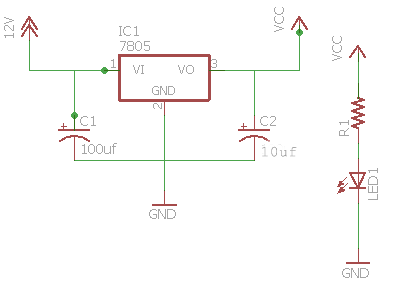
Rechts ziet u de schakeling voor de voeding van de ontvanger. Gebruik dit schema om het voedingscircuit aan te sluiten. Je kunt ook een LED toevoegen via een weerstand van 1k om de status van de voeding aan te geven.
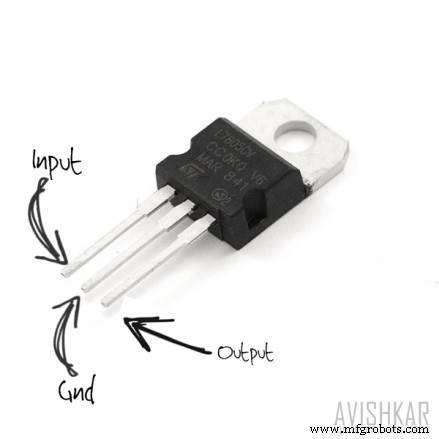
- IC 7805 die de 12V-voeding regelt naar 5V (als u geen 12V-voeding kunt krijgen, kunt u een 9V-voeding gebruiken)
- 0.1uf en 470uf condensator
- 1k weerstand voor de status-LED
OPMERKING: Gebruik koellichaam voor 7805 omdat we 7V (12-5) laten vallen, dus er wordt veel warmte geproduceerd om de regelaar te verbranden, dus het gebruik van een koellichaam wordt aanbevolen.
Laten we beginnen met het maken van de zender (afstandsbediening)
Het zendergedeelte bestaat uit een versnellingsmeter die het handgebaar detecteert en de gegevens naar de Arduino stuurt. Later stuurt Arduino gegevens naar het encoder-IC in overeenstemming met de gegevens die zijn ontvangen van de versnellingsmeter en worden de gegevens naar de ontvanger verzonden. Sluit aan volgens het onderstaande circuit:
OPMERKING: Houd er rekening mee dat sommige versnellingsmeters een voeding van 3,3 V gebruiken en mogelijk beschadigd raken door 5 V. Raadpleeg de documentatie van de leverancier om erachter te komen wat de juiste spanning is.
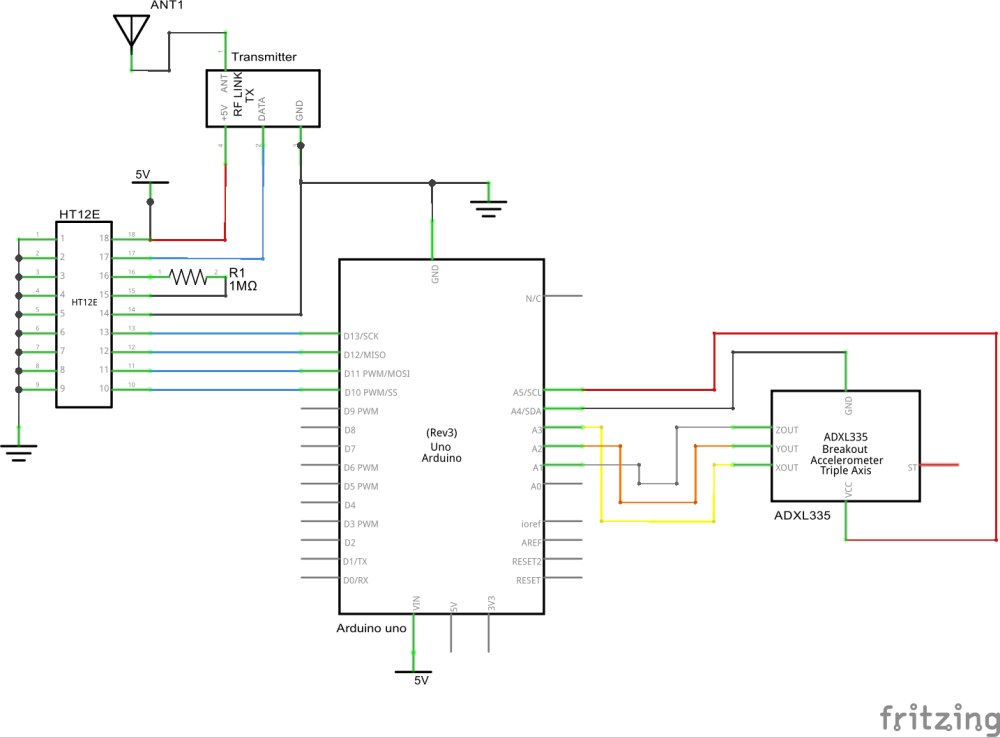
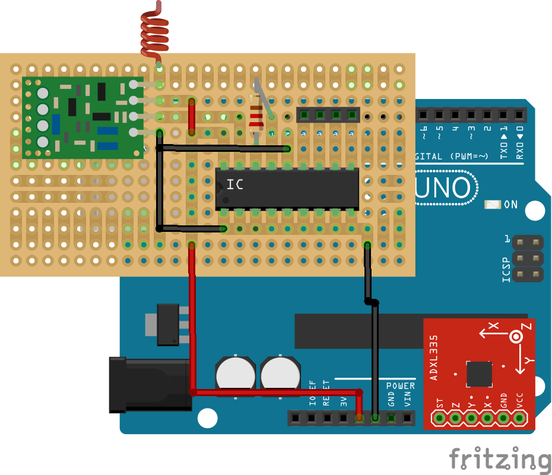
Dit is slechts een illustratie van de zender:
Upload code naar Arduino
Hier is de bijgewerkte code
Maak de ontvanger
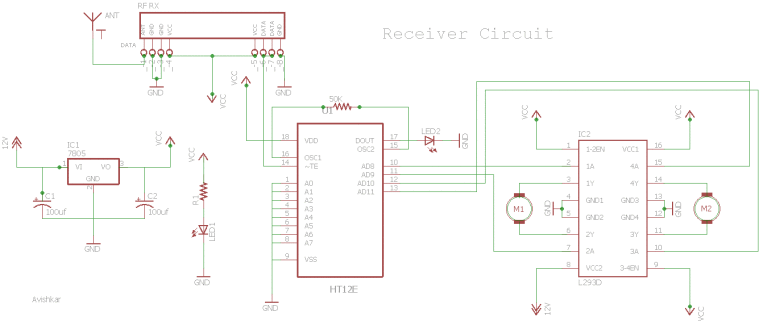
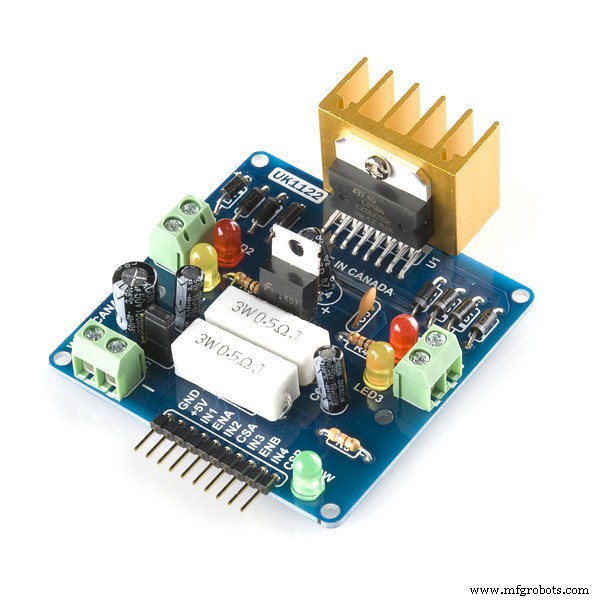
Het ontvangercircuit bestaat uit 2 IC's (HT12D-decoder, L293D-motorstuurprogramma), RF-ontvangermodule.
Bedraad het circuit volgens het bovenstaande schema van de ontvanger. Er zijn 2 LED's in de ontvangerkaart, één licht op wanneer de voeding aan de ontvanger wordt gegeven en de andere wanneer de voeding aan het zendercircuit wordt gegeven. De LED bij de IC HT12D moet gaan branden en dit geeft u een geldige transmissie (VT) wanneer de zender stroom krijgt, als er niet iets mis is met uw verbinding of uw RF-TX-RX-module.
Als je meer in detail wilt weten over de ontvangersectie, lees dan dit artikel.
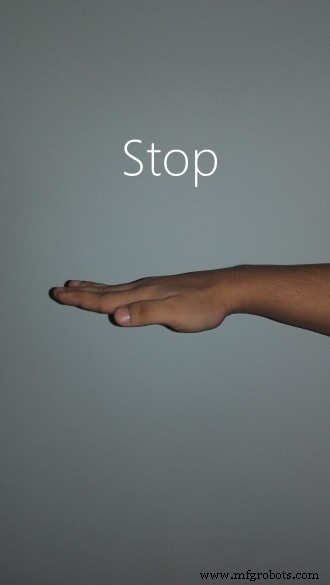
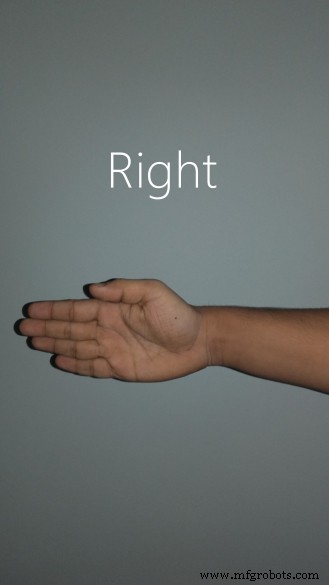
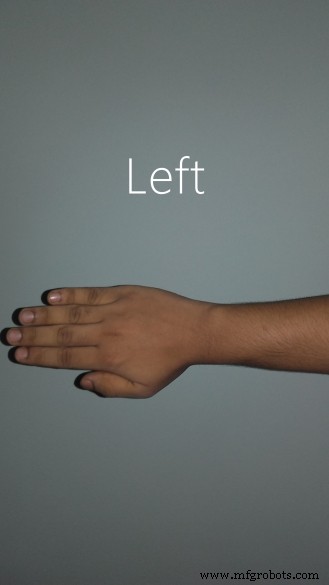
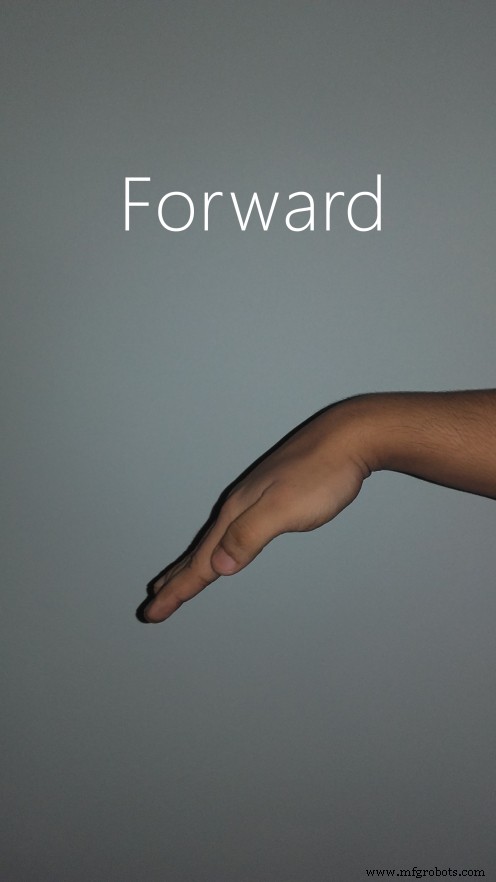
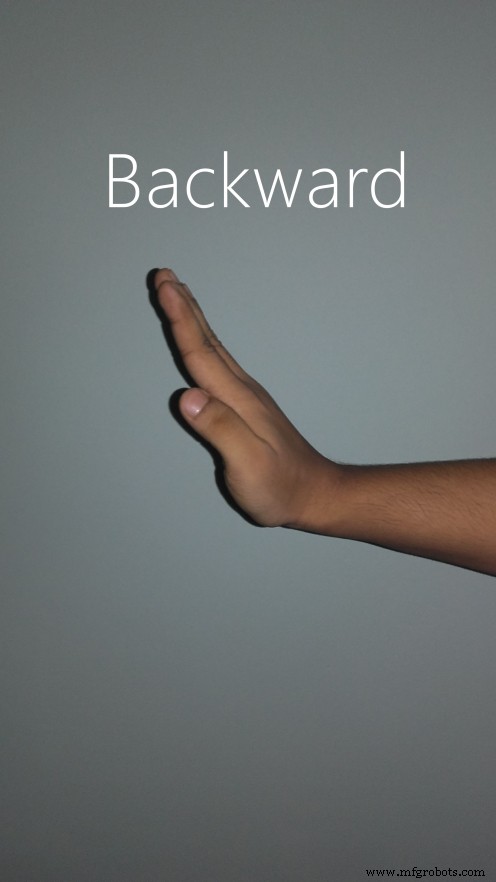
Welke gebaren zal de robot herkennen?
Deze robot is ontworpen om vijf sets gebaren te herkennen:vooruit, achteruit, links, rechts en stop. U krijgt een beter idee als u de foto's van de onderstaande gebaren bekijkt.
Genieten van het besturen van je robot.
Verklein het en maak het permanent.
Arduino Uno zal groot en omvangrijk zijn voor uw hand. En als u besluit om nog een project te maken met Arduino, moet u de Arduino en alle verbindingen die erop zijn gemaakt verwijderen, en u verliest uw oude werk. Ik hou er niet van om dat te doen, dus ik kwam met een oplossing om het permanent te maken. Je kunt dit artikel lezen om te leren hoe je je Arduino-project kunt verkleinen.
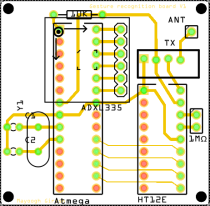
Download hier de PCB-layout voor de zelfstandige versie (spiegel).
standalone_etch_copper_top_mirror1.pdf standalone_etch_copper_top1.pdfBekijk deze video waarin ik de code heb overgebracht naar Atmega8 MCU. Ik heb alleen de uitgangen van MCU weergegeven met behulp van LED's.
Bekijk mijn blog voor mijn nieuwe projecten
Laat hier een reactie achter als je twijfelt. Het is mijn blog. Ik zal regelmatig daar controleren op feedback in plaats van hier.
Productieproces
- Raspberry Pi-robot bestuurd via Bluetooth
- Gebaargestuurde robot met Raspberry Pi
- Windows 10 IoT Core:spraakgestuurde robot
- Wifi-gestuurde robot met Raspberry Pi
- ROObockey:op afstand bestuurbare, door het doel ondersteunde straathockeyrobot
- Gebaargestuurde interactieve tafellamp
- Arduino-gamecontroller
- Arduino-aangedreven waterfles
- Spraakgestuurde robot
- Robotarm bestuurd via Ethernet
- Handgeleide robots