


Slimme scheider die droog en nat afval scheidt
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 1 |
Benodigde gereedschappen en machines
 |
| |||
 |
|
Apps en online services
 |
|
Over dit project
Beschrijving: Deze segregator kan met succes droog en nat afval scheiden.
Opmerking: Het kan plastic of metaal niet scheiden. Daarvoor moet je extra Sensoren en modules gebruiken
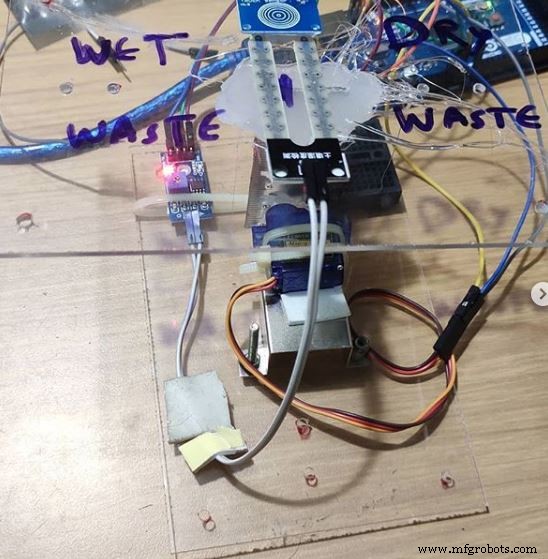
Constructie:
1. Ik heb 2 acrylplaten gebruikt als lichaam van mijn segregator
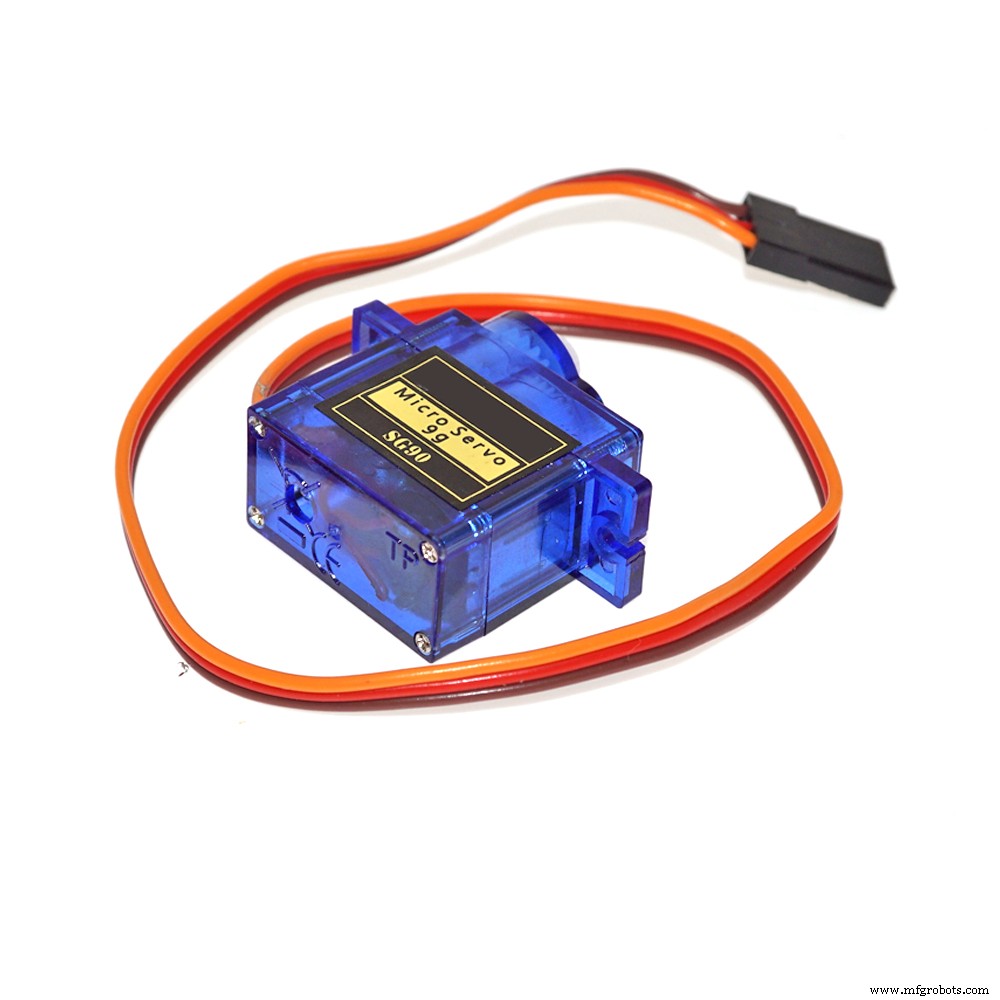
2 .Servomotor wordt gebruikt als een actuator die zal roteren afhankelijk van het type afval (droog of nat)
3. Ik heb een zeer goedkope stationaire schaal / liniaal gebruikt als de as van mijn servomotor. Dit verbindt de bovenste basis en servomotor. Ik heb lijmpistool gebruikt om het te plakken.
- Opmerking:je kunt feviquick ook als lijm gebruiken, maar het is riskant, dus gebruik het voorzichtig.
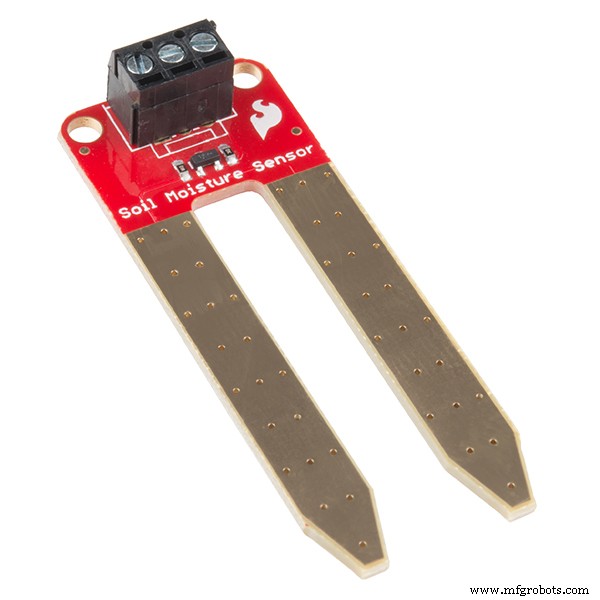
4. De vochtsensor is op het bovenste deel van de afscheider bevestigd, zodat het afval direct op de sensor terechtkomt. Er is ook een aanraaksensor om droog afval te detecteren. Dit voltooit de constructie van dit project.

Waarom de sensor aanraken als de vochtsensor alleen het type afval kan classificeren?
- ja het is waar dat vocht nat afval kan classificeren. maar het kan geen droog afval classificeren. waarom? stel je voor dat je een neutrale staat wilt hebben als er geen afval op de sensor wordt gezet. Hoeveel je ook probeert, je zult deze neutrale staat niet kunnen bereiken. De vochtsensor bevindt zich standaard altijd in een droge toestand, waardoor de afscheider altijd naar beide kanten kantelt. Om dit probleem op te lossen wordt de aanraaksensor gebruikt.
Implementatie stap voor stap:
- Stap 1 :Verzamel 2 acrylplaten zoals weergegeven in de bovenstaande afbeelding. Je kunt deze vellen overal in lokale winkels krijgen of online bestellen via amazon.
- Stap 2 :Maak de gaten in de plexiglas platen zoals op de afbeelding te zien is, zodat je de beslaghouder erop kunt bevestigen.
- Stap 3 :Plak vervolgens op de bovenzijde van de batterijhouder de servomotor recht vooruit gericht zoals op de afbeelding. U kunt de servomotor bevestigen met dubbelzijdig plakband of lijmpistool.
- Stap 4 :Neem dan een plastic stationaire schaal (die je vroeger op scholen gebruikte om lijnen te tekenen) en maak er een gat in aan de onderkant dat iets kleiner zal zijn dan de diameter van de motoras. (Je kunt de gaten maken met een hete soldeerbout of een andere dunne stalen staaf.)
- Stap 5 :Plak de andere plexiglas plaat op de bovenkant van de schaal zoals weergegeven in de afbeelding met behulp van lijmpistool. Zorg ervoor dat het goed vastzit en niet beweegt.
- Stap 6 :Plaats de vochtsensor en aanraaksensor bovenop de acrylplaat.
>> Door deze 6 stappen correct te volgen, ben je klaar om te gaan :)
Hardware-uitleg:
Voor het implementeren van deze hardwareconfiguratie moet u de volgende concepten grondig leren:
- Arduino : Arduino is een microcontroller die in dit project zal worden gebruikt. Via deze link kom je er alles over te weten. Vergeet ook niet de officiële documentatie van Arduino te raadplegen.
- C++-programmering : Voor het programmeren van Arduino leer je C++ programmeren op een gemiddeld niveau. Je zult ook de basisfuncties van Arduino moeten leren.
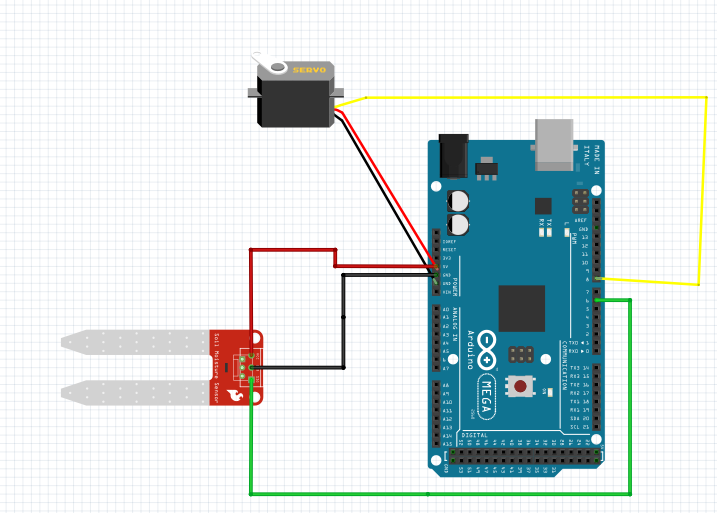
- Vochtsensor : Je zult de interface van Arduino met de vochtsensor met schakelschema moeten leren.
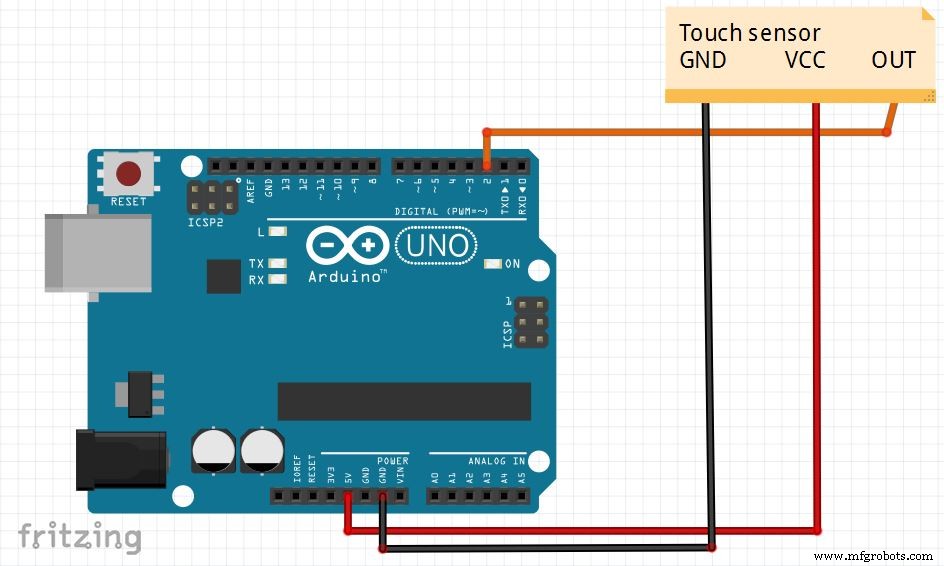
- Aanraaksensor: Je zult de interface van Arduino met de aanraaksensor met schakelschema moeten leren.
- Servomotor : U zult moeten leren over servomotor en hoe deze precies wordt bediend met Arduino.
Werking van Smart Segregator Stap voor stap:
- Stap 1: Afval wordt op de vochtsensor gezet en beland.
- Stap 2 :Afhankelijk van de ingestelde drempelwaarde Vochtsensor classificeert het als droog of nat.
- Stap 3: Zodra stap 2 is voltooid, draait de servomotor in beide richtingen, afhankelijk van het type afval, en het afval gaat in het juiste compartiment.
- Stap 4: Het hele proces is autonoom en continu.
Video: Vergeet niet om de geweldige werking van dit project te bekijken (link staat hieronder :)
Code
- Slimme scheider
Slimme scheiderC/C++
#includeclass Smart_Segregator/* ________________________________________________________________________ | | Beschrijving | ----------- | - Dit is een slimme afscheider die droog en nat scheidt | nat afval. (Het kan metaal of plastic niet scheiden) | |................................................................. ............ | | attributen | ---------- | pin_1 :int | - Servomotor pinnummer. | | pin_2 :int | - Vochtsensor pinnummer. | | pin_3 :int | - Pincode aanraaksensor. | |................................................................. ........... | | Methoden | ------- | dry_waste() | - Deksel van de afscheider schuift naar rechts. | | wet_waste() | - Deksel van de afscheider schuift naar links | | neutral_state() | - Waarin het deksel van de segregator in het midden zit. | | execute() | - Smart Segregator begint te werken. | |____________________________________________________________ */{ public:int servo_pin; int vochtigheid_sensor_pin; int touch_sensor_pin; int detect_vocht; int detect_touch; Servo-servo; Smart_Segregator (int pin_1, int pin_2, int pin_3) {servo_pin =pin_1; vochtigheid_sensor_pin =pin_2; touch_sensor_pin =pin_3; detecteren_vocht =0; detect_touch =onwaar; } void init() { Serial.begin(9600); servo.attach (servo_pin); servo.schrijven(90); pinMode (vochtsensor_pin, INPUT); pinMode (touch_sensor_pin, INPUT); Serial.println("Uw Smart Segregator is klaar om te scheiden!"); } void dry_waste() { servo.write(0); } void wet_waste() { servo.write(180); } void neutral_state() { servo.write(90); } void execute() {detect_moisture =digitalRead(moisture_sensor_pin); detect_touch =digitalRead (touch_sensor_pin); if (detect_moisture> 85 &&detect_touch ==true) { wet_waste(); } else if (detect_moisture <=85 &&detect_touch ==true) { dry_waste(); } else { neutral_state(); } }}segregator =Smart_Segregator(8,6,2);void setup() { segregator.init();}void loop() { segregator.execute();}
Schema's
Productieproces
- Arduino-sensor – Typen en toepassingen
- Raspberry Pi temperatuur- en lichtsensor
- Slimme afvalbak
- DHT11-sensor met LED's en een piëzo-luidspreker
- Slimme jaloezieën
- IOT - Smart Jar met ESP8266, Arduino en ultrasone sensor
- Slimme schoenen (automatisch rijgen en elektriciteit opwekken)
- Arduino Cloud Sensor Tower
- Eenvoudige en slimme robotarm met Arduino
- Op Arduino gebaseerde RPM-teller met een nieuw en sneller algoritme
- Nat en droog oliecartersysteem begrijpen