


Automatische katapult voor het gooien van voer voor huisdieren, ballen en meer!
Componenten en benodigdheden
 |
| × | 1 | |||
| × | 3 | ||||
 |
| × | 1 | |||
 |
| × | 1 | |||
 |
| × | 10 | |||
 |
| × | 2 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Hallo en welkom bij mijn eerste project!
Onze hond HOUDT van haar eten, ze eet het letterlijk allemaal binnen enkele seconden op. Ik heb manieren bedacht om dit te vertragen, van ballen met het eten erin tot het door de hele achtertuin gooien. Verbazingwekkend genoeg is ze nu als een vacuüm en kan ze het voedsel indrukwekkend snel vinden en opeten. Dus terug naar de tekentafel en ik bedacht dit apparaat om haar te helpen langzamer te eten en te genieten van haar eten :)
CONCEPT

Neem alsjeblieft een paar seconden de tijd om van de 2 video's te genieten, ze verklaren veel.
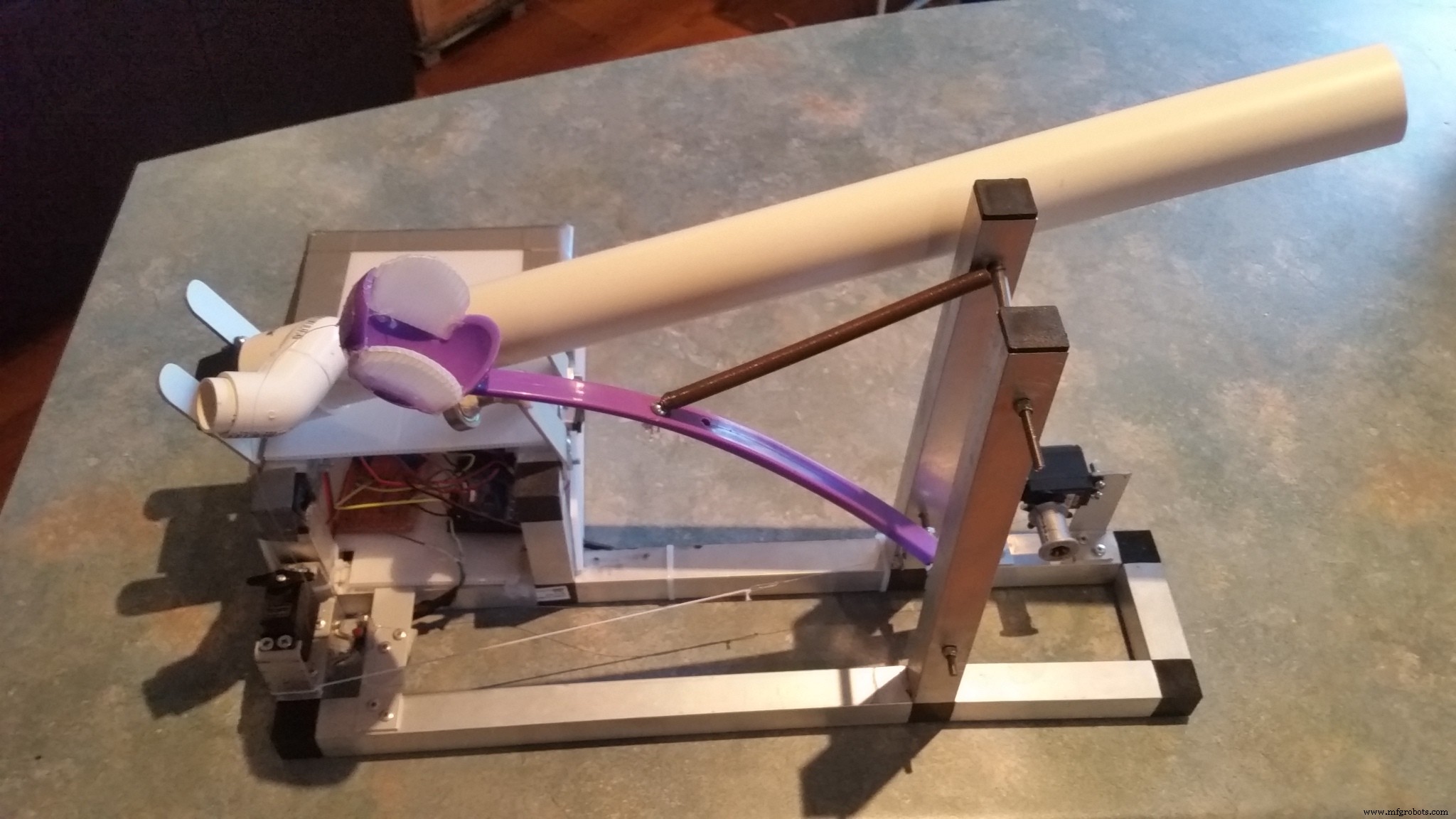
Maar, in woorden, het basisconcept is dat de Rotator-servo roteert en de katapultarm naar beneden trekt. Het doet dit totdat het de eindschakelaar raakt. Dan gaat de Trigger-servo naar de houdpositie, die de katapultarm naar beneden houdt. De Rotator-servo spoelt vervolgens terug naar de oorspronkelijke positie, klaar voor de volgende worp.
De Food Delivery-servo roteert de pijp en levert wat voedsel (of andere dingen) aan de katapultarmcontainer / kop. De Trigger-servo draait dan en laat de veer de katapultarm terugtrekken en het voedsel weggooien.
Bij het testen, deze opstelling en katapulteerde hondenvoerkoekjes over 10 meter, met voedsel dat aan het rollen was. Aanpassingen aan servo's en het veranderen van de veer zullen dit volledig wijzigen.
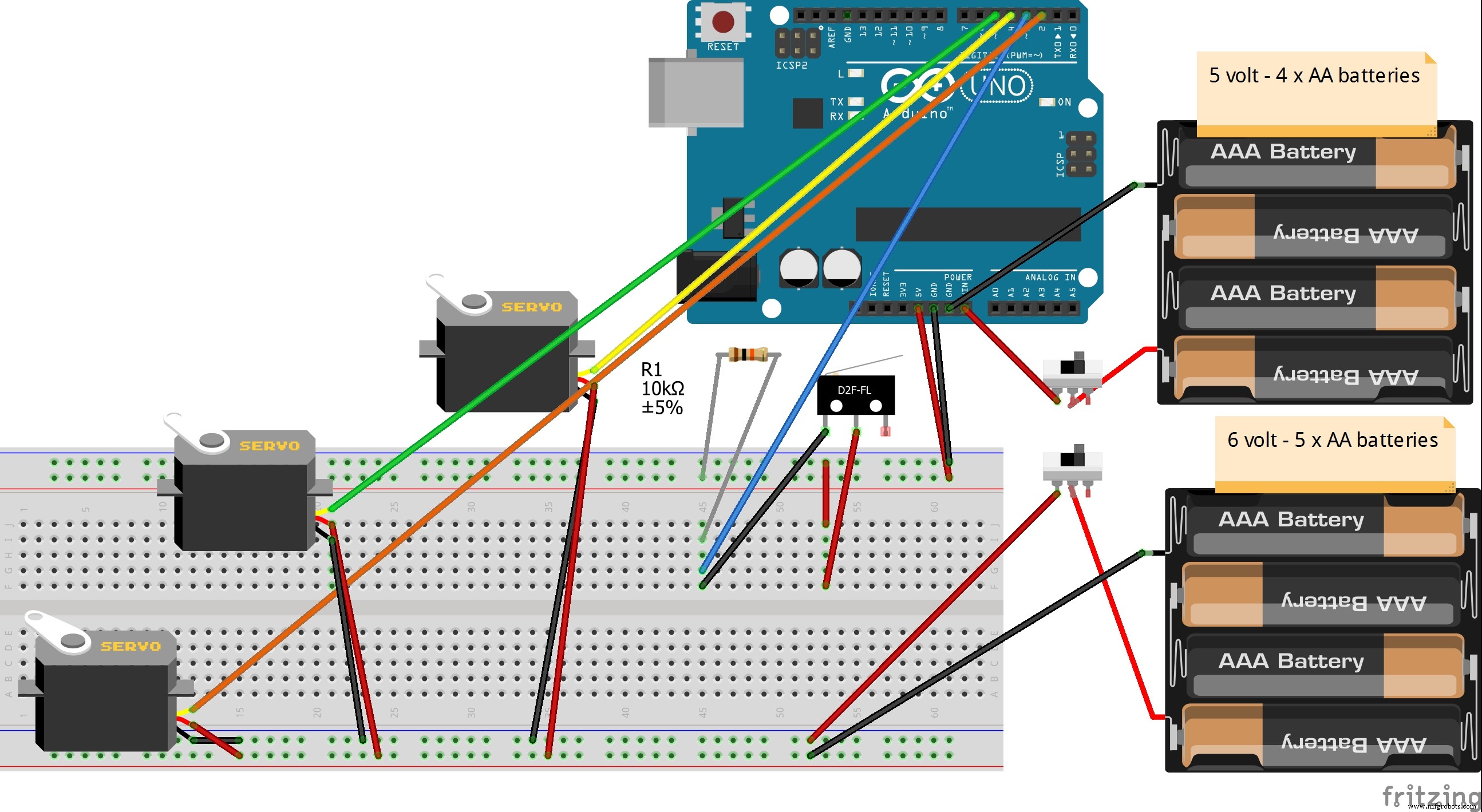
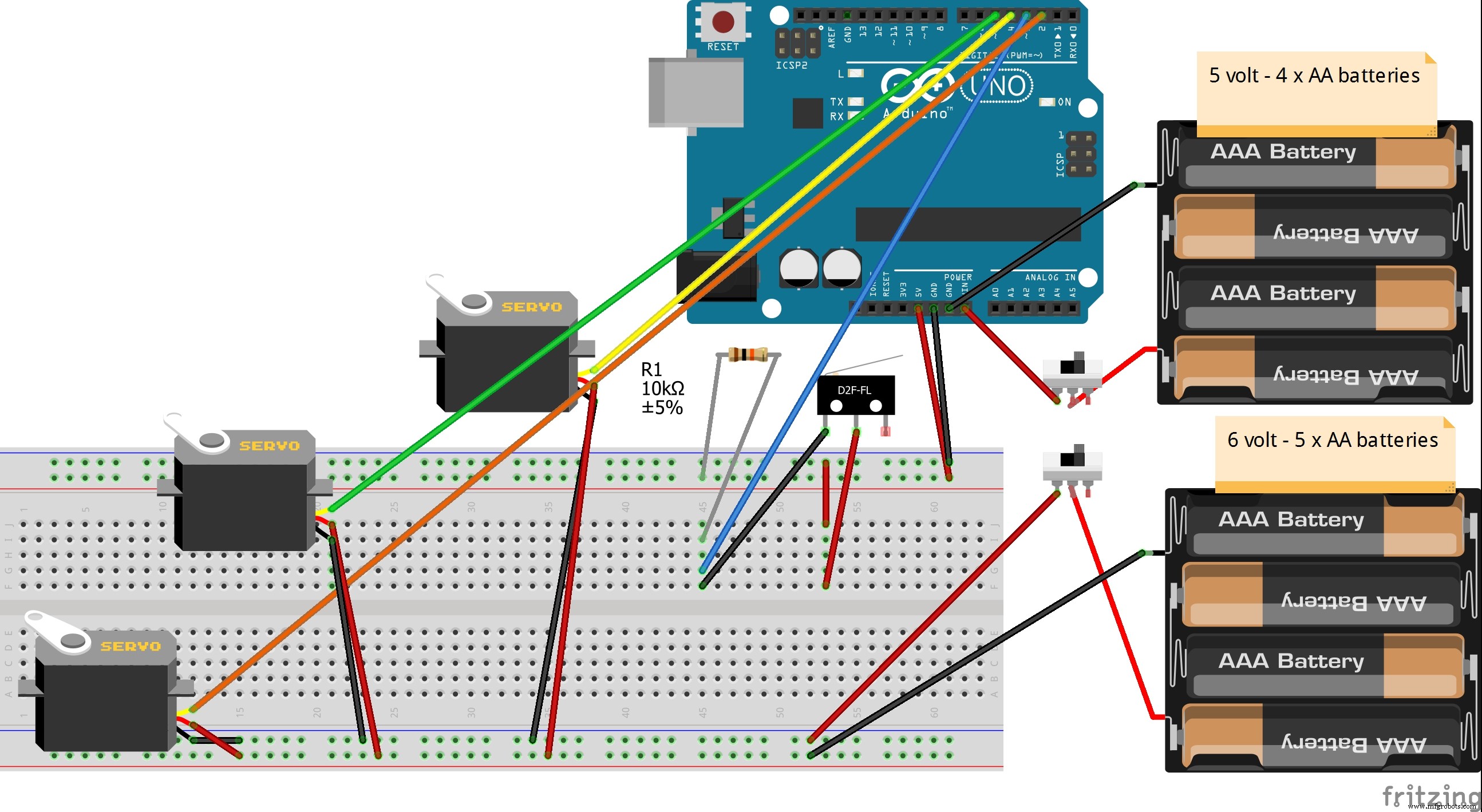
ELEKTRONICA
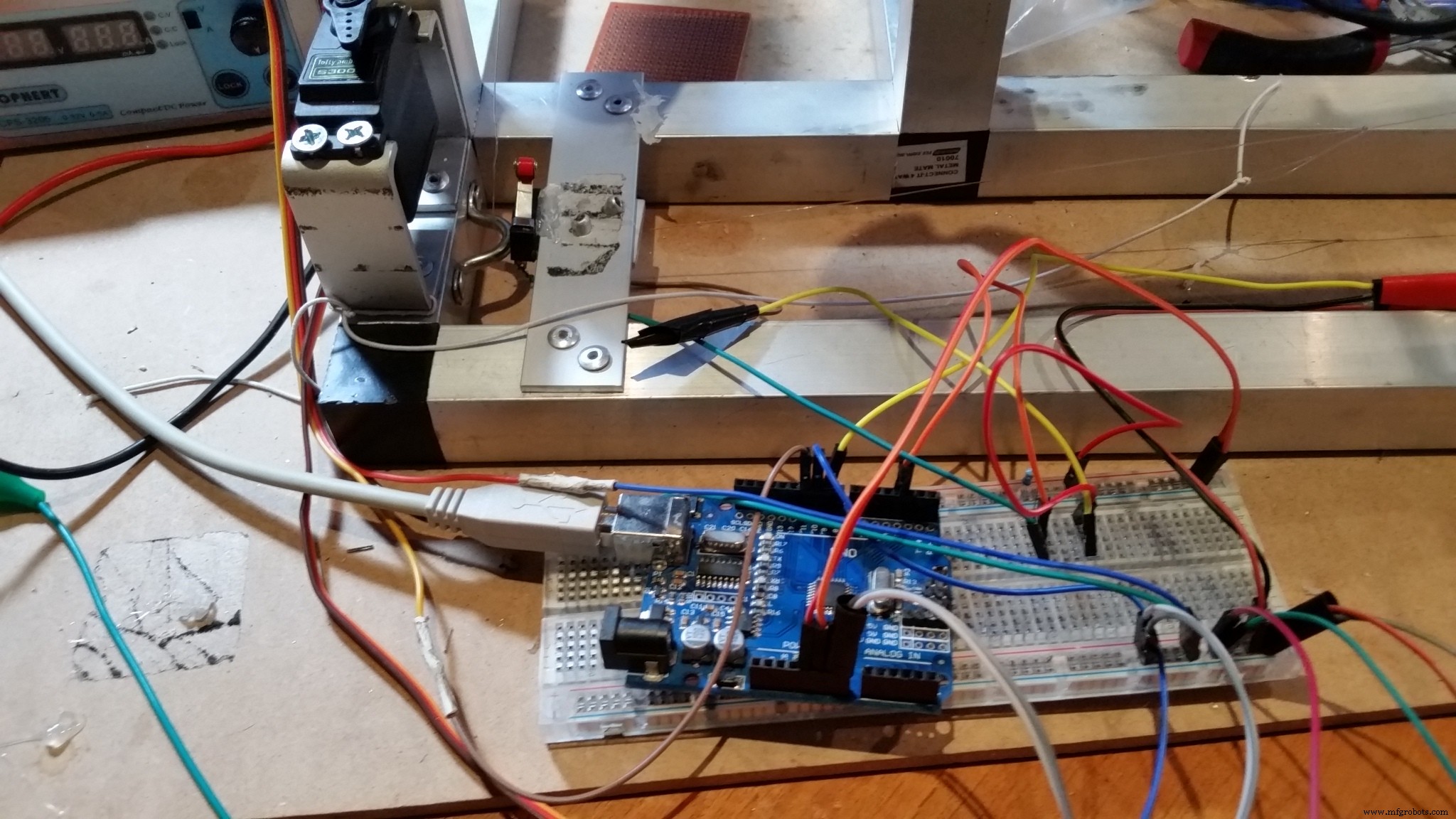
Ik zal proberen beknopt te zijn tijdens dit project, niet alleen voor de eenvoud, maar omdat deze katapult op 100 verschillende manieren kan worden gemaakt. Het is schaalbaar en je kunt verschillende structuren maken en verschillende materialen gebruiken. Naast de elektronica en servo's, is de rest volledig flexibel met wat je bij de hand hebt, of binnen je budget.
Ik ga niet stap voor stap uitleggen hoe je de elektronica moet doen, daar zijn genoeg indrukwekkende projecten over. Vooral omdat ik een nieuweling ben, heb ik waarschijnlijk fouten gemaakt en kun je beter leren van professionals;)
MATERIALEN
- Arduino Uno R3 - elke Arduino zal het werk echter doen
- 2 x 180 graden servo's
- 1 x continu draaiende servo
- Eindschakelaar
- 10k ohm weerstand
- 4 x AA-batterijen en hoesje
- 1 x 6 volt lantaarnbatterij - kan (en zal ik) worden vervangen door 5 x AA-batterijen die aan elkaar zijn verbonden
- 2 x schakelaars - elke soort is voldoende, zelfs de eenvoudigste
- Aansluitkabels - veel van deze;)
- Broodplank - om te testen
MATERIALEN - INDIEN PERMANENT MAAKT
Perf board 2 x 2-pins connectoren - optioneel, u kunt de batterijbehuizingen vast bedraden.
SERVOS
Ik kocht een paar goedkope Lofty Ambition S3003 180 graden servo's van eBay. Je zult iets van deze grunt willen, probeer niet minder te kopen, omdat ze de lading niet kunnen dragen. Maar het hoeven ook geen dure te zijn van Jaycar (Aussie elektronicawinkel) of iets dergelijks. De continu-rotatieservo die ik heb gebruikt, is FS5106R. Model is niet belangrijk, maar je hebt zeker de servo nodig om tenminste deze specificaties te hebben.
Als je de katapult sterker of groter maakt, zorg er dan voor dat je grotere servo's krijgt die bij je passen.
STRUCTUUR

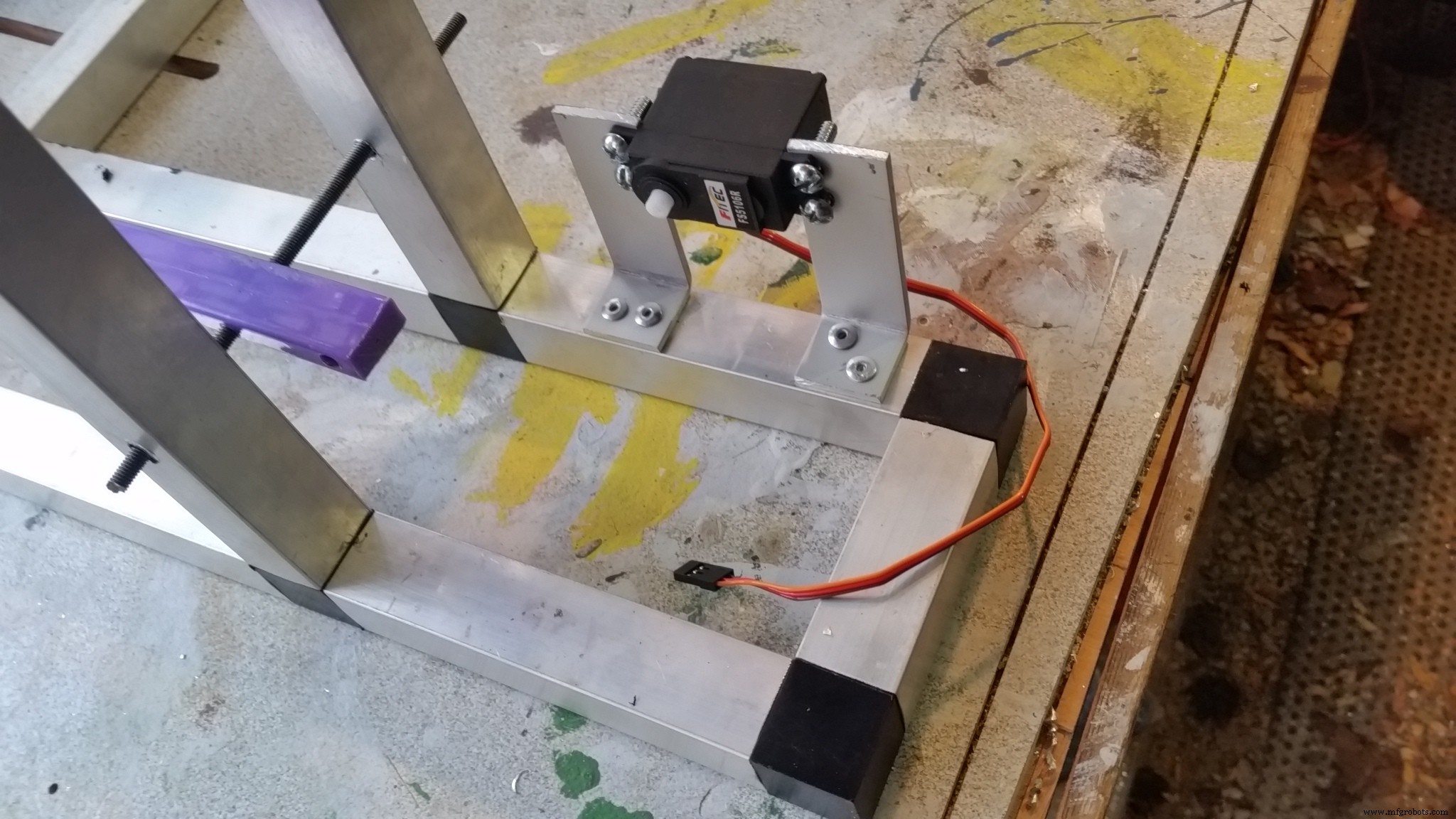


Zoals eerder vermeld, is de structuur geheel aan jou. Je kunt het maken van plastic, hout of metaal. De maat is ook aan jou. Als je meer voedsel (of andere dingen) wilt kunnen katapulteren, maak het dan kleiner of groter. Dus vanwege deze punten zal ik niet in detail treden over hoe ik mijn structuur heb gemaakt. Ik ben erg blij om overal antwoord op te geven.
Ik ben een GROTE fan van hergebruik/recycle/upcycle/etc. Zoveel van wat ik heb gebruikt, had ik in mijn schuur. Ik heb het grootste deel van mijn structuur gemaakt van aluminium dat ik had vanwege een ander project. De hoofdstructuur bestaat uit 25 mm vierkante aluminium buizen en "connect-it" plastic connectoren. De beugels voor de motoren heb ik gemaakt van 25 mm breed x 3 mm aluminium.
Het concept voor het bezorgen van eten was van dit project:
https://www.hackster.io/circuito-io-team/iot-pet-feeder-10a4f3 door https://www.hackster.io/circuito-io-team - hartelijk dank aan hen!
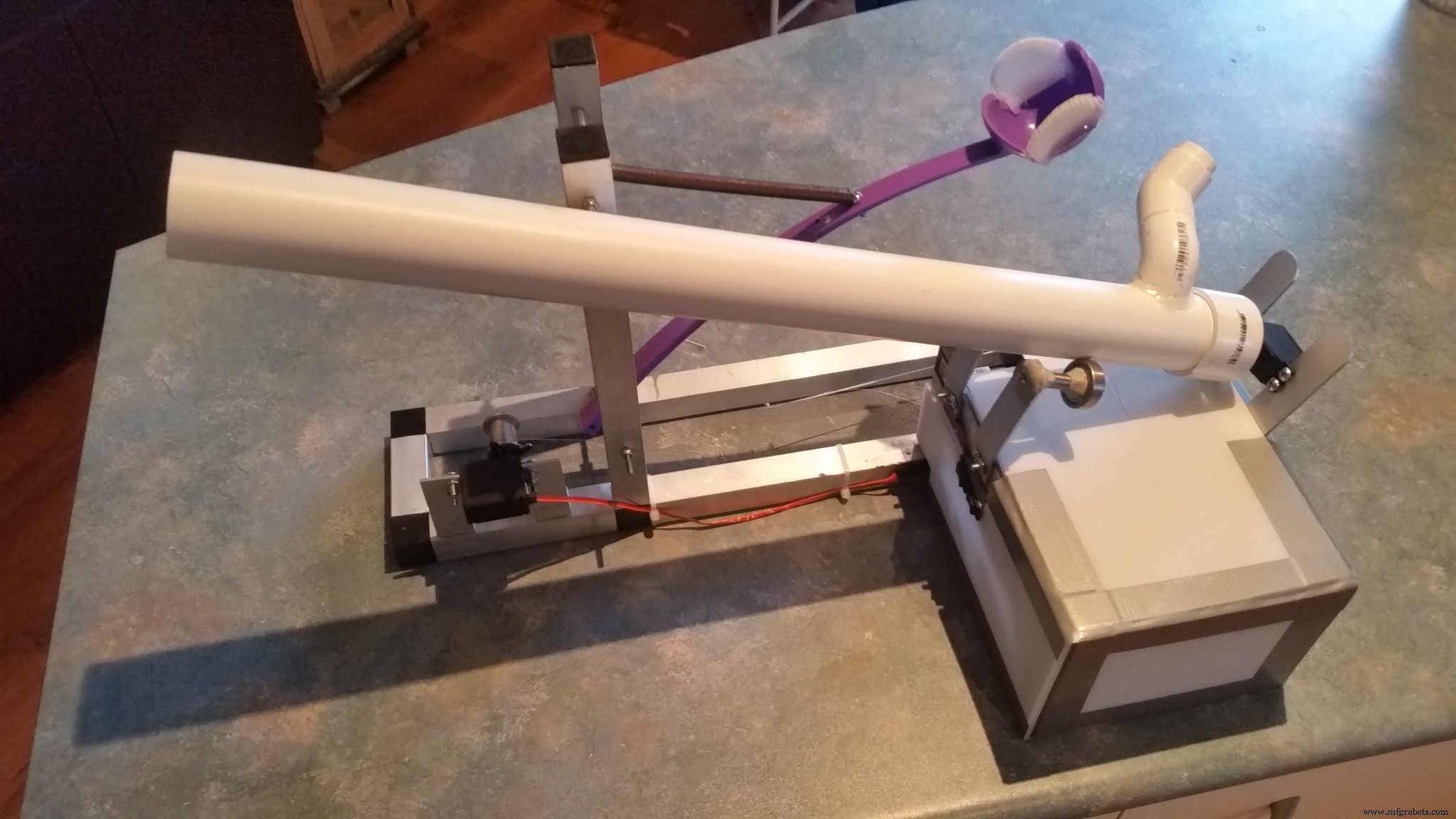
De houder die ik heb gemaakt is van 40 mm PVC-buis van mijn plaatselijke ijzerhandel. De eigenlijke arm is twee kleinere 45 graden connectoren, met elkaar verbonden en warm gelijmd in de grotere pijp. De grotere PVC-buis heeft nog een connector van 45 graden om het gemakkelijker te maken om de koekjes voor huisdierenvoer (of andere dingen) toe te voegen. Allemaal gemaakt om uit elkaar te kunnen worden gehaald, voor eventuele aanpassingen.
De rest van de voedselbezorgingsarm is ontworpen om een gemakkelijke cirkelvormige beweging mogelijk te maken - om het de servo gemakkelijker te maken. Er zijn betere manieren (als je de tools hebt) om dit te maken, maar ik heb mijn best gedaan. Ik maakte een paar beugels, sneed een metalen staaf in stukken en gebruikte een product genaamd "knead it" om de staven aan de beugels en de lagers te bevestigen. Zoals je op de video's kunt zien, draait de PVC-buis soepel over de lagers en deze nemen een groot deel van het gewicht (en het vereiste koppel) van de servo weg.
De katapultarm is een tennisbalwerper van een goedkope winkel $ 2.
De katapulterende kracht komt van een oude veer die ik in mijn werkplaats vond - zoals je kunt zien aan de roest. De grootte en het type en de sterkte van de veer is cruciaal voor hoe sterk en effectief de katapult functioneert. Je zult de servokracht, veerkracht en flexibiliteit van de katapultarm moeten balanceren. Het verkrijgen van deze balans is lastig en hangt echt af van wat je zoekt. Ik heb gekozen voor een ontwerp dat beweging in de arm laat, waardoor er enige onvoorspelbaarheid ontstaat over de bestemming van het eten. De bovenbehuizing van de katapultarm, die de koekjes vasthoudt, helpt ook bij de onvoorspelbaarheid. Meer plezier voor het huisdier om het voer te vinden.
De katapultarm wordt via een vislijn naar beneden getrokken door een kleine metalen handgreep (of feeder, afhankelijk van uw gebruik), naar beneden onder een platform dat de eindschakelaar vasthoudt (meer daarover in de tweede plaats), langs de lengte van de structuur, door een andere metalen handvat (om te voorkomen dat het in de war raakt), vervolgens bevestigd aan de spil (ik gebruikte het plastic ding dat katoen vasthoudt voor de spil op de Rotator), die is bevestigd aan de continue servo. Bovendien gebruikte ik een dun en zwak stukje elastiek, bevestigd aan de vislijn en de Trigger-beugels. Dit zorgt ervoor dat wanneer de Rotator afrolt, de vislijn nergens verstrikt raakt.
Ik heb deze Tunnel Core - Kunststofplaat voor alle doeleinden - Dubbelwandig hulpprogramma gebruikt voor een gemakkelijke manier om de behuizing voor de batterijen en elektronica te maken.
De structuur is zeer solide, maar toch vrij licht. Het zwaarste onderdeel daarvan is de lantaarnbatterij, die binnenkort wordt vervangen door oplaadbare AA-batterijen.
GELEERDE LESSEN &TOEKOMSTIGE WIJZIGINGEN
Zoals met alles waar je geen meester in bent, worden er onderweg altijd dingen geleerd. In dit project, nou, laten we zeggen dat je verveeld zou zijn met mijn lijst voordat je aan het einde was;)
Een van de grootste problemen is voedselverstopping. Deze voedselbezorgarm kwam uit een project, maar helaas kan ik hem niet vinden. Het levert sporadisch geen koekjes op, maar dat is maar goed ook, het houdt het dier aan het raden! Maar over het algemeen werkt het erg goed.
Ik heb de structuur van aluminium gebouwd omdat onze hond niet zachtaardig is, dus hij moet haar vasthouden. Gelukkig gaat het tot nu toe goed.
Ik ga de katapultarm verbeteren, zodat hij er wat sexyer uitziet. De meeste belangrijke elementen kunnen worden uitgesplitst om toegang mogelijk te maken. bijv. voedselbezorging, elektronicabehuizing.
Al met al een heel leuk project en onze hond vindt het geweldig! Ik ben erg blij om antwoorden of advies te geven over wat dan ook.
Heel erg bedankt aan Hackster en aan jou voor het lezen over de automatische katapult.
Code
- Automatische katapult - Arduino-code
Automatische katapult - Arduino-codeArduino
/* * Automatische petfood flinger door Nathan King juni 2018 */#includeint FoodDeliveryReleasePosition =115;int FoodDeliveryHoldPosition =0;int TriggerReleasePosition =90;int TriggerHoldPosition =0;int limit_switch =3;int switch_state =0;Servo voedselbezorging; // maak een servo-object om de servo-trigger voor de voedselbezorging te bedienen; // maak een servo-object om de triggerServo-rotor te besturen; // maak een servo-object om de rotatorvoid setup () { rotator.attach (2); // bevestigt de rotator servo trigger.attach (4); // voegt de trigger-servo fooddelivery.attach(5) toe; // bevestigt de servo-pinmodus voor voedselbezorging (limit_switch, INPUT); Serial.begin(9600);}void loop() { roter.write(89); // stopt Rotator-servo van bewegen - onnodig als je een goede servo hebt;) vertraging (500);// Startposities fooddelivery.write (FoodDeliveryHoldPosition); vertraging (1000); trigger.write(TriggerHoldPosition); vertraging (1000); trigger.write(TriggerReleasePositie); vertraging (1000);// eindschakelaarlus om de Rotator-servo te stoppen switch_state =digitalRead (limit_switch); Serial.println(switch_state); while (switch_state ==HOOG) {switch_state =digitalRead (limit_switch); Serial.println("Schakelaar staat uit"); roter.schrijven(75); // start Rotator met de klok mee op xx snelheid (0-255) } Serial.println ("Schakelaar is aan"); roter.write(89); // stopt Rotator servo// Houdt de katapultarm op de trekker en zet de Rotator terug in de startpositie trigger.write (TriggerHoldPosition); vertraging (1000); roter.schrijven(110); vertraging (4500); roter.write(89); vertraging (2000); // Voedselbezorging om fooddelivery.write (FoodDeliveryReleasePosition) te katapulteren; vertraging (500); fooddelivery.write(FoodDeliveryReleasePosition); // wacht tot het eten valt vertraging (1000); fooddelivery.write(FoodDeliveryHoldPosition); delay(150);// Dit is om een vertraging toe te voegen tussen de voedselbezorging en de trigger die roter.write(89) loslaat; vertraging (1000); // Laat katapult los!! trigger.write(TriggerReleasePositie); vertraging (3000); // vertraging voor het huisdier om het eten te vinden - bewerk dit om te wijzigen hoe snel het eten wordt bezorgd :)}
Schema's
Productieproces
- Voedsel voor huisdieren
- Hygiënisch ontwerp voor de voedings- en verwerkingsindustrie
- Controller-, recorderselectietips voor voedsel- en dranktoepassingen
- Acetal Color Masterbatches voor auto's en meer op basis van emissiearme dragers
- B&R onthult 'high-end' computer voor autonome landbouw- en bouwvoertuigen
- Tips voor CNC-bewerking van titanium:ruimtevaart en meer
- Sliding Headstock Automatic voor Zwitsers en productiedraaien
- Tips voor het aanbrengen van metaalsmeermiddel:voorkomen van overvetten en meer
- Invar:slimme warehousing trends voor 2021 en daarna
- Automatische voedselautomaten - Productveelzijdigheid
- Weten wanneer en hoe u een automatische boosterpomp voor uw huis moet kiezen