


Motorbeveiliging - Soorten fouten en beveiligingsapparaten
Soorten motorstoringen en beveiligingsapparatuur
Veelvoorkomende motorstoringen en -fouten
Het is belangrijk om motorstoringen en -fouten te kennen en te begrijpen om de meest geschikte beveiligingsapparaten te definiëren voor elk geval . U moet ook op de hoogte zijn van belangrijke termen met betrekking tot motorbesturing en -bescherming.
niet-statische machines zijn motoren worden onderworpen aan elektrische en mechanische belasting .
Motorstoringen zijn er in drie basistypen :elektrisch, mechanisch en mechanisch dat vooruitgang boekt in elektrisch .
Veelvoorkomende typen motorstoringen en fouten zijn:
- Lager defect
- Isolatie kapot
- Vergrendelde rotor
- Oververhitting
- Overbelasting (elektrisch en mechanisch)
- Fase-onbalans en eventuele spanningsonbalans leiden tot een nog grotere stroomonbalans.
- Achteruit rennen
- Onjuiste uitlijning van de as
- Trilling
Oververhitting kan optreden door ondermaatse motor , onvoldoende koeling bij lage snelheid bij gebruik van aandrijvingen met variabele snelheid (VSD ), wijzigingen in de lading op de motor zoals vastgelopen apparatuur en hete omgevingsomstandigheden .
Isolatie defect , wat leidt tot verbrande wikkelingen , impliceren kortsluiting hetzij binnen de motor of binnen het voedingscircuit voor de motor , en kan worden veroorzaakt door oververhitting, overbelasting en overspanningen .
Ongeveer 80% van elektromotorstoringen zijn het gevolg van wikkelschade in de motorstator en lagerfouten .
Lager defect op motoren kan een indicatie zijn van de onjuiste lagers voor de aanvraag .
Een verticaal gemonteerde motor heeft andere lagers nodig dan een motor horizontaal gemonteerd . Een motor die een grote of multiriemaandrijving aandrijft zal lagers nodig hebben die grote radiale belastingen aankunnen . Een motor vastgeschroefd naar een vervormde grondplaat zal draaien .
Lagers zijn meestal klein vergeleken met andere belangrijke motorcomponenten , waardoor ze bijzonder kwetsbaar zijn voor beschadiging en slijtage; sommige onderzoeken wijten meer dan de helft van alle motorstoringen aan lagerstoringen , waarvan de meeste het gevolg zijn van te weinig of te veel smering . Een andere belangrijke oorzaak van lagerstoring is foutieve uitlijning .
Onjuiste asuitlijning zal vernietigen lagers ruim vóór hun volledige werkzame leven . De motoras moet direct in lijn zijn met de as die wordt aangedreven wat kan alleen worden bereikt met behulp van precisie-uitlijningstechnieken zoals laser .
Andere problemen die kunnen optreden bij motoren zijn:
- Het binnendringen van water en stof in de statorspoelen of de aansluitbehuizing leidt tot kortsluiting
- Zachte voetmotorvoeten niet waterpas vastgeschroefd
- Onjuiste motormontage of behuizingstype
- Elektrische of mechanische onbalans
Ruis geeft motorische problemen aan maar veroorzaakt gewoonlijk geen schade . Ruis gaat echter meestal gepaard met trillingen .
Trilling kan op verschillende manieren schade veroorzaken . Het heeft de neiging om wikkelingen los te schudden en mechanische schade aan isolatie door het materiaal te kraken, af te schilferen of af te schuren . Broosheid van geleidingsdraden door overmatige beweging en borstelvonken bij commutators of stroomcollectorringen is ook het gevolg van trillingen.
Ten slotte, vibratie kan lagerstoring versnellen door kogels te laten "brinnellen" glijlagers om uit vorm te worden geslagen of de behuizingen los te maken in de schelpen .
Telkens wanneer ruis of trillingen worden gevonden in een werkende motor, de bron moet snel geïsoleerd en gecorrigeerd worden .
Wat een voor de hand liggende bron van het geluid of de trillingen lijkt te zijn, kan een symptoom zijn van een verborgen probleem. Daarom is vaak een grondig onderzoek vereist.
Ruis en trillingen kan worden veroorzaakt door een verkeerd uitgelijnde motoras of kan worden verzonden naar de motor van de aangedreven machine of aandrijfsysteem . Ze kunnen ook het gevolg zijn van elektrische of mechanische onbalans in de motor .
Elektrische onbalans treedt op wanneer de magnetische aantrekkingskracht tussen stator en rotor is ongelijk rond de omtrek van de motor . Hierdoor buigt de as af als het roteert en een . maakt mechanische onbalans . Elektrische onbalans duidt meestal op een elektrische storing zoals een open stator- of rotorwikkeling , een open balk of ring in eekhoornkooimotoren of kortgesloten veldspoelen in synchrone motoren . Een ongelijkmatige luchtspleet, meestal door versleten glijlagers, veroorzaakt ook elektrische onbalans .
De belangrijkste oorzaken van mechanische onbalans omvatten een vervormde montage, gebogen as, slecht uitgebalanceerde rotor, losse onderdelen op de rotor of slechte lagers . Ruis kan ook komen van de ventilator die tegen het frame, de mantel of vreemde voorwerpen in de mantel slaat . Als de lagers slecht zijn , zoals aangegeven door overmatig lagergeluid , is het noodzakelijk om vast te stellen waarom de lagers het begaven .
Een ander probleem waarmee motoren kunnen worden geconfronteerd, is een lange starttijd . Als een motor wordt onderworpen aan vele opeenvolgende starts , de rotorwikkelingen of rotorstaven kan verwarmd worden tot een punt waar de elektrische verbindingen tussen de rotorstaven en de eindringen beschadigd zijn .
Motorbeveiligingsapparatuur
Ongeacht de nominale spanning en grootte motoren hebben dat ze beveiligd zijn tegen overstroom (kortsluiting) en overbelasting .
Kleine en middelgrote LV-motoren zijn meestal alleen beschermd tegen overbelasting en kortsluiting en grote LV-motoren en MV-motoren hebben ook andere beveiligingen .
Overbelastings- en overstroombeveiligingen moet zijn ontworpen om ongevoelig te zijn voor aanloopstromen op de starttijd , om te vermijden ontijdige stroomonderbreking .
Voor LV-motoren de bescherming tegen overstroom en kortsluiting kan worden uitgevoerd door zekeringen , geassocieerd met lastscheiders of stroomonderbrekers met onmiddellijke uitschakeling die reageren op onmiddellijke (bijna onmiddellijk ) waarden van stroom van een kortsluiting, aardlek of geblokkeerde rotorstroom .
Inverse tijd stroomonderbrekers hebben zowel thermische als onmiddellijke tripfuncties en zijn vooraf ingesteld om te trippen op gestandaardiseerde niveaus .
Dit is het meest voorkomende type stroomonderbreker dat wordt gebruikt in de bouwsector voor woningen, commerciële en zware constructies.
De thermische actie van deze stroomonderbreker reageert op hitte . Als de ventilatie-inlaten en -uitlaten van een motor niet voldoende zijn om de warmte van de wikkelingen af te voeren van de motor, wordt de hitte gedetecteerd door de thermische actie van de stroomonderbreker .
Als kortsluiting zou moeten gebeuren, de magnetische actie van de stroomonderbreker detecteert de momentane waarden van de stroom en schakelt de stroomonderbreker uit .
Zekeringen zijn meestal niet geschikt voor de bescherming tegen overbelasting , want als formaat is om overbelastingsbeveiliging te bieden , zouden ze blazen als de motor start vanwege de hoge inschakelstroom van de motor , hoewel ze kunnen worden gebruikt als een back-upbeveiliging tegen overbelasting .
Bescherming met zekeringen presenteert het risico van enkelfasige schade naar de motor wanneer slechts één zekering doorbrandt tenzij enkelfasige bescherming wordt geboden; dit onderwerp wordt later in dit hoofdstuk besproken.
Grote LV-motoren en MV-motoren zijn beveiligd tegen kortsluitingen (fase-naar-fase en fase-naar-aarde ) door overstroomrelais (50; 50N; 51; 51N ) verbonden met CT .
De bescherming tegen overbelasting wordt normaal gesproken verzekerd door thermisch overbelastingsrelais . Dit relais kan van de volgende typen zijn:
Bi-metalen strip
Een thermische overbelastingsbeveiliging zal accommoderen de korte hoge startstroom van een motor terwijl nauwkeurige bescherming het van een lopende overbelasting . De verwarmingsspoel en de actie van de bimetaalstrip introduceer een tijdvertraging dat de motor de tijd geeft om te starten en in de normale stroom te komen zonder dat de thermische overbelasting uitschakelt . Thermische overbelastingsbeveiligingen kan handmatig of automatisch opnieuw ingesteld worden afhankelijk van hun toepassing en hebben een expert waarmee ze nauwkeurig kunnen worden ingesteld op de motorstroom .
Omgevingstemperatuur waarin een startmotor en motor zich bevinden moet worden overwogen bij het selecteren van bimetaalstriprelais omdat een hoge omgevingstemperatuur de uitschakeltijd voor overbelasting vermindert .
Verminderde overbelastingsreistijd kan overlast veroorzaken als een motor zich in een koelere omgevingstemperatuur bevindt dan de starter en leidt tot motorische burn-out wanneer de motor zich in een hogere omgevingstemperatuur bevindt dan de starter .
De meeste apparaten voor thermische overbelasting zijn geschikt voor gebruik bij een maximale temperatuur van 40 ºC , en een derating van het relais kan nodig zijn .
De meeste relais zijn instelbaar over een bereik van 85% tot 115% van hun waarde.
Sommige modellen zijn beschikbaar met omgevingscompensatie . Een omgevingsgecompenseerde apparaten uitstappunt wordt niet beïnvloed door de omgevingstemperatuur en presteert consistent bij dezelfde stroomwaarde.
Dit type relais wordt vaak gebruikt op lage en middelgrote LV-motoren .
Normen en gegevens van fabrikanten tonen meestal aanbevolen regelinstelpunt van dit type relais in overeenstemming met nominaal vermogen van de motor; dezelfde tabellen tonen ook aanbevolen nominale stromen van zekeringen (aM- of gG-type – zie paragraaf 2.4) en onmiddellijke stroomonderbrekers die geassocieerd zijn met de relais voor overstroombeveiliging , zoals weergegeven in Tabel 3.
Tabel 3 – Nominale zekeringsstroom voor motorbeveiliging 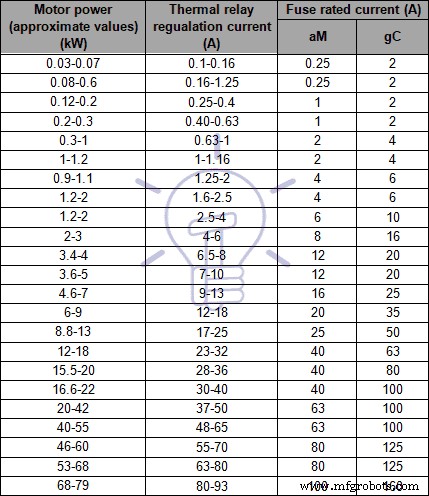
Elektronische digitale overbelastingsrelais
Dit type beveiliging wordt gebruikt voor grote LV-motoren en HV-motoren , en bevat een microprocessor . Deze apparaten kunnen de verwarming van de motorwikkelingen modelleren door de motorstroom te bewaken en ze kunnen ook meet- en communicatiefuncties bevatten.
Algemene bescherming van grote LV-motoren en MV-motoren wordt meestal gedaan door de volgende beveiligingsapparaten:
- Overbelastingsbeveiliging:49
- Onmiddellijke fase overstroom:50
- Onmiddellijke overstroom aarde:50N/50G
- Overstroom vertragingsfase:51
- Tijdvertraging aarde overstroom:51N/51G
In sommige situaties het wordt niet aanbevolen om motoren te beschermen tegen overbelasting; dat is het geval bij bluswaterpompen en rookafvoerventilatoren .
Zeer grote LV-motoren en MV-motoren zijn duur en het is meestal verstandig om uitgebreidere beschermingsregelingen te bieden . Dergelijke regelingen omvatten:
- Bewaking en bescherming van lagertemperatuur (38 .) )
- Differentiële bescherming (87M )
- Onvolledige startvolgorde / lange starttijdbeveiliging (66 )
- Negatieve fasevolgorde (fase-omkeringsbeveiliging )
- Oververhittingsbeveiliging
- Bescherming tegen fase-onbalans of fase-uitval (47 )
- Bescherming tegen vastlopen of vergrendelde rotor
- Onder- en overspanningsbeveiliging (27 en 59 , respectievelijk)
- Trillingsmonitors en bescherming (39)
- Kronkelende temperatuurmonitors en beveiligingsapparaten
Differentiële bescherming voor LV- en HV-motoren
Differentiële bescherming wordt vaak geleverd voor middelgrote en grote motoren met voedingsspanningen van groter dan ongeveer 4 kV , en elektrisch bediend (shunt trip ) stroomonderbrekers . De differentiële bescherming biedt hoge snelheidsrichting en opheffing van fouten op de motorstatorwikkelingen .
- Lees ook:Hoe de kabelmaat voor LT- en HT-motoren te berekenen
Waar het voedingssysteem stevig geaard is, zal de differentiële bescherming detecteren zowel fase-naar-fase als fase-naar-aarde fouten .
Met differentiële bescherming de stroom aan elk uiteinde van elke wikkeling wordt vergeleken om te bepalen wanneer er een storing is .
Deze functie vereist twee sets CT , een aan het begin van de motoraanvoer en de andere aan het sterpunt .
De differentiële beschermingsfunctie kan alleen worden gebruikt als beide zijden van elke statorfase uit de motor worden gehaald voor externe aansluiting zodanig dat de fasestroom die in en uit elke fase gaat kan worden gemeten . Het differentiële element trekt de stroom die uit elke fase komt af van de stroom die naar elke fase gaat en vergelijkt het resultaat of het verschil met het differentiële opneemniveau.
Als dit verschil gelijk is aan of groter is dan het ophaalniveau, zal er een rit plaatsvinden .
Afbeelding 19 toont een voorbeeld van deze bescherming. 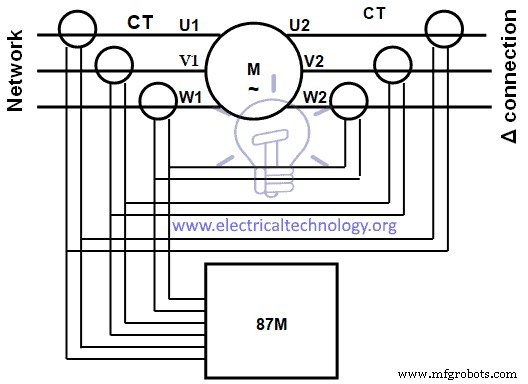
Figuur 19 – Motordifferentieelbeveiliging
zes CT gebruiken in een optelconfiguratie , tijdens het starten van de motor zijn de waarden van de twee stroomtransformatoren op elke fase mogelijk niet gelijk l als de CT zijn niet perfect identiek en asymmetrische stromen kan ervoor zorgen dat de CT op elke fase verschillende uitgangen heeft .
Om overlast te voorkomen in deze configuratie, het verschilniveau moet mogelijk minder gevoelig worden ingesteld , of de differentiële vertraging moet mogelijk verlengd worden om door de probleemperiode te rijden tijdens het starten van de motor .
De lopende differentiële vertraging kan dan verfijnd worden op een applicatie zodat deze zeer snel reageert en is gevoelig voor lage differentiële stroomniveaus .
Wikkelingen oververhit bescherming wordt meestal gedaan met weerstandstemperatuurdetectoren (RTD ) en thermistor en apparaten automatisch uitschakelen kan worden geïnstalleerd. Een aparte boosterventilator aansluiten om de motorventilator te helpen lost het oververhittingsprobleem op wanneer een VSD wordt gebruikt om de motor sp te regelen eed.
Onvolledige startvolgorde / lange starttijd veroorzaakt oververhitting van de rotor .
Omdat het niet mogelijk is om de warmte van de rotor fysiek te meten op kooiankermotoren is nodig om de hitte . te bepalen door de stroom te meten die de rotor door de stator trekt om de rotor te prikkelen. Een thermische replica van de rotor wordt vastgesteld met behulp van een I 2 t kromme .
De herstartblokkering zal de gebruiker blokkeren om de motor te starten als het relais heeft vastgesteld dat de rotor een temperatuur heeft bereikt die de rotor zal beschadigen moet een startpoging worden ondernomen . Het relais zal dus alleen een herstart toestaan als de rotor voldoende thermische reserve heeft om te starten .
Lagerbescherming wordt meestal uitgevoerd door RTD en thermistor om de temperatuur te controleren .
Trillingsbescherming gebruikt sensoren/versnellingsmeters die doorgaans op belangrijke locaties op de motor en lagers worden geplaatst .
Sinds de lagers zijn het lastdragende deel van de mechanische aandrijflijn, versnellingsmeters moet op de invoer en uitvoer worden geplaatst
Afbeelding 20 toont een voorbeeld van trillingssensoren en aanbevolen locaties. 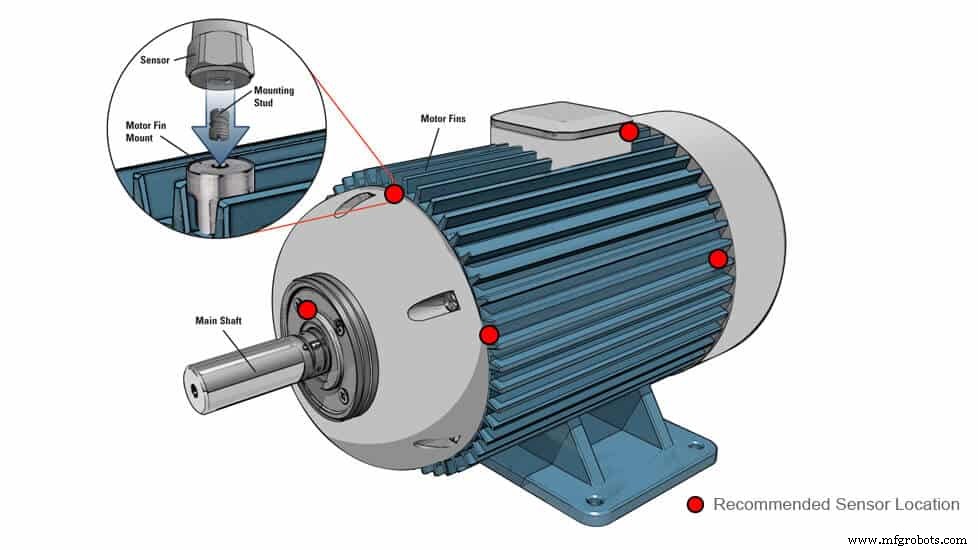
Afbeelding 20 – Motortrillingssensoren
Tegenwoordig IED (zie Paragraaf 2.1) die alle vereiste beveiligingsfuncties groeperen worden vaak gebruikt voor grote LV-motoren en MV-motoren .

Over de auteur:Manuel Bolotinha
-Licentiaat in elektrotechniek – energie- en energiesystemen (1974 – Instituto Superior Técnico/Universiteit van Lissabon)– Master in Electrical and Computers Engineering (2017 – Faculdade de Ciências e Tecnologia/Nova University of Lisbon)
– Senior adviseur in onderstations en energiesystemen; Professionele instructeur
Industriële technologie
- Wat is Rapid Prototyping? - Typen en werken?
- Wat is additieve productie? - Soorten en werking?
- Wat is solderen? - Soorten en hoe te solderen?
- Wat zijn walserijen en hun typen?
- Wat is weerstandslassen? - Typen en werken?
- Wat is vormzand? - Soorten en eigenschappen
- Wat is thermisch spuiten? - Typen en toepassing?
- Typen elektrische ontladingsmachines (EDM), voor- en nadelen
- Typen draaibankbewerkingen en snijgereedschappen
- Betekenis en typen productieproces
- Wat is overbelastingsbeveiliging?