


Stappenmotoren
Stappenmotor versus servomotor
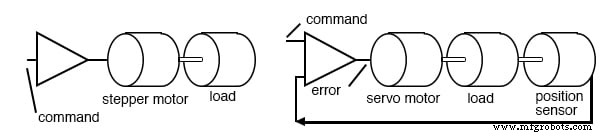
Een stappenmotor is een “digitale” versie van de elektromotor. De rotor beweegt in discrete stappen zoals bevolen, in plaats van continu te draaien zoals een conventionele motor. Wanneer gestopt maar geactiveerd, een stepper (afkorting van stappenmotor) houdt de belasting stabiel met een houdkoppel .
De wijdverbreide acceptatie van de stappenmotor in de afgelopen twee decennia werd gedreven door de opkomst van digitale elektronica. Moderne solid-state driver-elektronica was een sleutel tot het succes ervan. En microprocessors kunnen gemakkelijk worden gekoppeld aan circuits voor stappenmotorbesturing.
Wat de toepassing betreft, was de voorloper van de stappenmotor de servomotor. Tegenwoordig is dit een duurdere oplossing voor hoogwaardige motion control-toepassingen. De kosten en complexiteit van een servomotor zijn te wijten aan de extra systeemcomponenten:positiesensor en foutversterker. Het is nog steeds de manier om zware lasten buiten het bereik van steppers met een lager vermogen te plaatsen.
Hoge acceleratie of ongewoon hoge nauwkeurigheid vereist nog steeds een servomotor. Anders is de standaard de stepper vanwege de eenvoudige aandrijfelektronica, goede nauwkeurigheid, goed koppel, matige snelheid en lage kosten.
Stappenmotor versus servomotor
Een stappenmotor positioneert de lees-schrijfkoppen in een diskettestation. Ze werden ooit voor hetzelfde doel gebruikt in harde schijven. De hoge snelheid en nauwkeurigheid die vereist zijn voor de positionering van de moderne harde schijfkop, vereist echter het gebruik van een lineaire servomotor (spreekspoel).
De servoversterker is een lineaire versterker met enkele moeilijk te integreren discrete componenten. Er is een aanzienlijke ontwerpinspanning vereist om de versterking van de servoversterker versus de faserespons op de mechanische componenten te optimaliseren. De stappenmotordrivers zijn minder complexe solid-state schakelaars, die ofwel "aan" of "uit" zijn. Een stappenmotorcontroller is dus minder complex en kostbaar dan een servomotorcontroller.
Slo-syn synchrone motoren kunnen werken op AC-lijnspanning zoals een enkelfasige inductiemotor met permanente condensator. De condensator genereert een 90° tweede fase. Met de gelijkspanning hebben we een 2-fasen aandrijving.
Stuur golfvormen van bipolair (±) blokgolven van 2-24V komen tegenwoordig vaker voor. De bipolaire magnetische velden kunnen ook worden gegenereerd door unipolaire (één polariteit) spanningen toegepast op afwisselende uiteinden van een in het midden getapte wikkeling (figuur hieronder).
Met andere woorden, DC kan naar de motor worden geschakeld zodat deze AC ziet. Omdat de wikkelingen in volgorde worden bekrachtigd, synchroniseert de rotor met het daaruit voortvloeiende magnetische veld van de stator. Daarom behandelen we stappenmotoren als een klasse van AC-synchrone motoren.
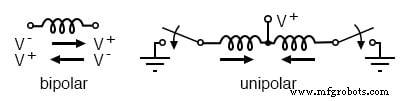
Een unipolaire aandrijving van een in het midden getapte spoel bij (b), emuleert wisselstroom in een enkele spoel bij (a)
Kenmerken
Stappenmotoren zijn robuust en goedkoop omdat de rotor geen kronkelende sleepringen of commutator bevat. De rotor is een cilindrische vaste stof, die ook uitspringende polen of fijne tanden kan hebben. Meestal is de rotor een permanente magneet.
U kunt bepalen dat de rotor een permanente magneet is door niet-aangedreven handrotatie met arrestkoppel , koppelpulsen. Stappenmotorspoelen zijn gewikkeld in een gelamineerde stator, behalve voor can stack bouw. Er kunnen maar twee wikkelfasen zijn of maar liefst vijf.
Deze fasen worden vaak in paren gesplitst. Een 4-polige stappenmotor kan dus twee fasen hebben die zijn samengesteld uit in-line paren van polen op een onderlinge afstand van 90° deel. Er kunnen ook meerdere poolparen per fase zijn. Een 12-polige stepper heeft bijvoorbeeld 6 paar polen, drie paar per fase.
Aangezien stappenmotoren niet noodzakelijk continu draaien, is er geen pk-classificatie. Als ze continu ronddraaien, benaderen ze niet eens een sub-fractioneel vermogen. Het zijn echt kleine apparaten met een laag vermogen in vergelijking met andere motoren.
Ze hebben koppelwaarden tot duizend in-oz (inch-ounce) of tien Nm (newton-meter) voor een eenheid van 4 kg. Een kleine stepper met een "dubbeltje" heeft een koppel van een honderdste van een newtonmeter of een paar inch-ounces. De meeste steppers hebben een diameter van enkele centimeters met een fractie van een nm of een paar in-oz koppel.
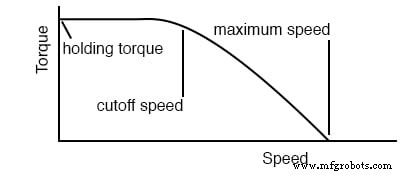
Het beschikbare koppel is een functie van het motortoerental, de traagheid van de belasting, het belastingskoppel en de aandrijfelektronica, zoals geïllustreerd op de snelheid versus koppelkromme onderstaand. Een bekrachtigde, vasthoudende stepper heeft een relatief hoog houdkoppel beoordeling. Er is minder koppel beschikbaar voor een draaiende motor, die bij een hoge snelheid tot nul afneemt.
Dit toerental is vaak niet haalbaar vanwege de mechanische resonantie van de motorbelastingscombinatie.
Kenmerken van de stappensnelheid
Stappenmotoren bewegen stap voor stap, de staphoek wanneer de aandrijfgolfvormen worden gewijzigd. De staphoek is gerelateerd aan de details van de motorconstructie:aantal spoelen, aantal polen, aantal tanden. Het kan vanaf 90° . zijn tot 0,75° , overeenkomend met 4 tot 500 stappen per omwenteling.
Aandrijfelektronica kan de staphoek halveren door de rotor in halve stappen te verplaatsen .
Steppers kunnen de snelheden op de snelheids-koppelcurve niet onmiddellijk bereiken. De maximale startfrequentie is de hoogste snelheid waarmee een gestopte en onbelaste stepper kan worden gestart. Elke belasting maakt deze parameter onbereikbaar.
In de praktijk wordt de stapsnelheid verhoogd tijdens het starten van ruim onder de maximale startfrequentie. Bij het stoppen van een stappenmotor, kan de stapsnelheid worden verlaagd voordat deze stopt.
Het maximale koppel waarbij een stepper kan starten en stoppen is het intrekkoppel . Deze koppelbelasting op de stepper is te wijten aan wrijvings- (rem) en traagheidsbelastingen (vliegwiel) op de motoras. Zodra de motor op snelheid is, uittrekkoppel is het maximale duurzame koppel zonder stappen te verliezen.
Er zijn drie soorten stappenmotoren in volgorde van toenemende complexiteit:variabele reluctantie, permanente magneet en hybride. De stepper met variabele reluctantie heeft een solide zachtstalen rotor met uitspringende palen. De permanentmagneetstepper heeft een cilindrische permanentmagneetrotor.
De hybride stepper heeft zachte stalen tanden toegevoegd aan de permanente magneetrotor voor een kleinere staphoek.
Variabele Reluctantie Stepper
Een variabele reluctantie stappenmotor vertrouwt op magnetische flux die het pad met de laagste reluctantie door een magnetisch circuit zoekt. Dit betekent dat een onregelmatig gevormde zachte magnetische rotor zal bewegen om een magnetisch circuit te voltooien, waardoor de lengte van een luchtspleet met hoge reluctantie wordt geminimaliseerd.
De stator heeft typisch drie wikkelingen verdeeld over poolparen, de rotor vier uitspringende polen, wat een 30° oplevert stap hoek. Een spanningsloze stepper zonder arreteerkoppel wanneer deze met de hand wordt gedraaid, is herkenbaar als een stepper van het variabele reluctantietype.
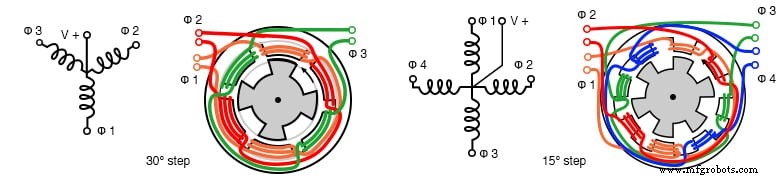
Driefasige en vierfasige stappenmotoren met variabele reluctantie
De aandrijfgolfvormen voor de 3-φ stepper zijn te zien in het gedeelte "Reluctantiemotor". De aandrijving voor een 4-φ stepper wordt getoond in onderstaande afbeelding. Door de statorfasen opeenvolgend te wisselen, ontstaat een roterend magnetisch veld dat de rotor volgt.
Vanwege het kleinere aantal rotorpolen beweegt de rotor echter minder dan de statorhoek voor elke stap. Voor een stappenmotor met variabele reluctantie wordt de staphoek gegeven door:
ΘS =360o/NS ΘR =360o/NR ΘST =ΘR - ΘS waarbij:ΘS =statorhoek, ΘR =rotorhoek, ΘST =staphoek NS =aantal statorpolen, NP =aantal rotorpolen
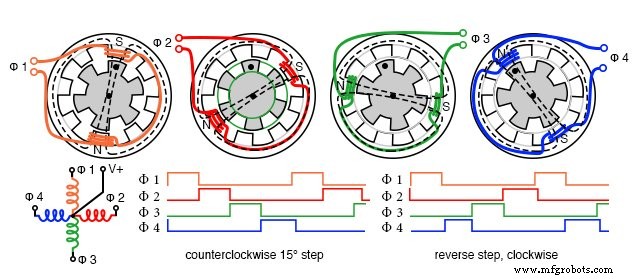
Stapvolgorde voor variabele reluctantie stepper
In de bovenstaande afbeelding, van φ1 naar φ2, enz., draait het magnetische veld van de stator met de klok mee. De rotor beweegt tegen de klok in (CCW). Let op wat er niet gebeurt! De gestippelde rotortand beweegt niet naar de volgende statortand. In plaats daarvan trekt het φ2-statorveld een andere tand aan bij het verplaatsen van de rotor tegen de klok in, wat een kleinere hoek is (15° ) dan de statorhoek van 30° .
De rotortandhoek van 45° komt in de berekening door de bovenstaande vergelijking. De rotor bewoog tegen de klok in naar de volgende rotortand op 45° , maar het komt overeen met een CW met 30° stator tand. De werkelijke staphoek is dus het verschil tussen een statorhoek van 45° en een rotorhoek van 30°.
Hoe ver zou de stepper draaien als de rotor en stator hetzelfde aantal tanden hadden? Nul—geen notatie.
Beginnend in rust met fase φ1 geactiveerd, zijn drie pulsen nodig (φ2, φ3, φ4) om de "gestippelde" rotortand uit te lijnen met de volgende CCW statortand, die 45° is . Met 3-pulsen per statortand en 8-statortanden, verplaatsen 24-pulsen of stappen de rotor over 360° .
Door de volgorde van pulsen om te draaien, wordt de draairichting rechtsboven omgekeerd. De richting, stapsnelheid en een aantal stappen worden bestuurd door een stappenmotorcontroller die een driver of versterker voedt. Dit kan worden gecombineerd tot een enkele printplaat.
De controller kan een microprocessor of een gespecialiseerde geïntegreerde schakeling zijn. De driver is geen lineaire versterker, maar een eenvoudige aan-uitschakelaar die voldoende stroom kan leveren om de stepper van stroom te voorzien. In principe kan de driver een relais zijn of zelfs een tuimelschakelaar voor elke fase. In de praktijk is de driver ofwel discrete transistorschakelaars ofwel een geïntegreerde schakeling.
Zowel de driver als de controller kunnen worden gecombineerd in een enkele geïntegreerde schakeling die een directe commando- en stappuls accepteert. Het voert de stroom in volgorde uit naar de juiste fasen.
Variabele reluctantie stappenmotor
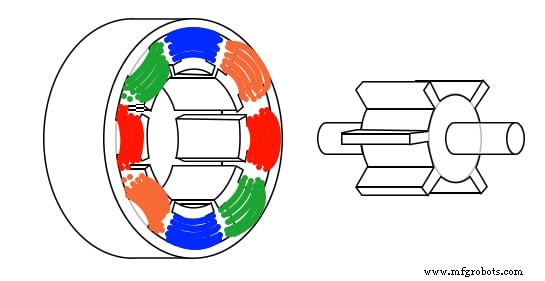
U kunt een reluctantie-stepper demonteren om de interne componenten te bekijken. De interne constructie van een stappenmotor met variabele reluctantie wordt getoond in de bovenstaande afbeelding. De rotor heeft uitstekende polen zodat ze kunnen worden aangetrokken door het roterende statorveld wanneer dit wordt geschakeld. Een echte motor is veel langer dan onze vereenvoudigde afbeelding.
Variabele reluctantie stepper drijft spindel aan
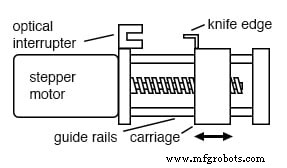
De as is vaak voorzien van een aandrijfschroef (figuur hierboven). Dit kan de koppen van een diskettestation bewegen op commando van de diskettestationcontroller.
Stappenmotoren met variabele reluctantie worden toegepast wanneer slechts een matig koppel vereist is en een grove staphoek voldoende is. Een screw drive, zoals gebruikt in een floppy disk drive, is zo'n toepassing. Wanneer de controller opstart, weet hij de positie van de wagen niet.
Het kan echter de wagen naar de optische onderbreker drijven, waarbij de positie waarop de mesrand de onderbreker afsnijdt, wordt gekalibreerd als "thuis". De regelaar telt vanaf deze positie stappulsen. Zolang het belastingskoppel het motorkoppel niet overschrijdt, kent de controller de positie van de wagen.
Samenvatting:stappenmotor met variabele reluctantie
- De rotor is een zacht ijzeren cilinder met opvallende (uitstekende) palen.
- Dit is de minst complexe, goedkoopste stappenmotor.
- Het enige type stepper zonder arreteerkoppel bij handrotatie van een spanningsloze motoras.
- Grote staphoek
- Een spindel wordt vaak op de as gemonteerd voor lineaire stapbewegingen.
Permanente magneet stepper
Een permanente magneet stappenmotor heeft een cilindrische permanentmagneetrotor. De stator heeft meestal twee wikkelingen. De windingen kunnen in het midden worden getikt om een unipolaire . mogelijk te maken stuurcircuit waarbij de polariteit van het magnetische veld wordt gewijzigd door een spanning van het ene uiteinde naar het andere van de wikkeling te schakelen.
Een bipolaire aandrijving met wisselende polariteit is vereist om wikkelingen zonder middenaftakking van stroom te voorzien. Een pure permanente magneetstepper heeft meestal een grote staphoek. Rotatie van de as van een spanningsloze motor vertoont een arreteerkoppel. Als de arreteerhoek groot is, zeg dan 7,5° tot 90° , is het waarschijnlijk een permanente magneetstepper in plaats van een hybride stepper.
Stappenmotoren met permanente magneet vereisen gefaseerde wisselstromen die op de twee (of meer) wikkelingen worden toegepast. In de praktijk zijn dit bijna altijd blokgolven die worden gegenereerd uit gelijkstroom door solid-state elektronica.
De bipolaire drive bestaat uit blokgolven die wisselen tussen (+) en (-) polariteiten, zeg, +2,5 V tot -2,5 V. Unipolair aandrijving levert een (+) en (-) alternerende magnetische flux aan de spoelen die zijn ontwikkeld uit een paar positieve blokgolven die worden aangebracht op tegenoverliggende uiteinden van een spoel met centrale aftakking. De timing van de bipolaire of unipolaire golf is golfaandrijving, volledige stap of halve stap.
Wave Drive
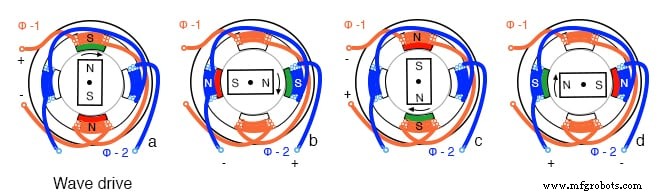
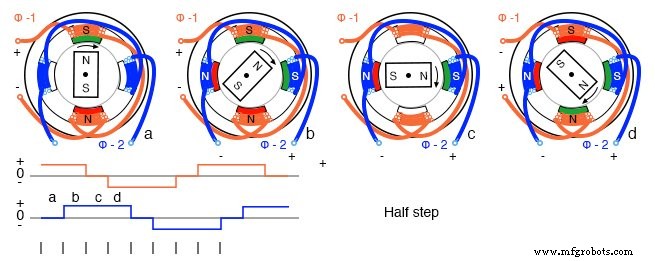
PM wave drive-volgorde (a) φ1+ , (b) φ2+ , (c) φ1- , (d) φ2-
Conceptueel is de eenvoudigste drive wave drive . De rotatievolgorde van links naar rechts is positief φ-1 punten rotor noordpool omhoog, (+) φ-2 punten rotor noord rechts, negatief φ-1 trekt rotor noord naar beneden, (-) φ-2 punten rotor links. De onderstaande golfvormen laten zien dat er slechts één spoel tegelijk wordt bekrachtigd. Hoewel dit eenvoudig is, levert dit niet zoveel koppel op als andere aandrijftechnieken.
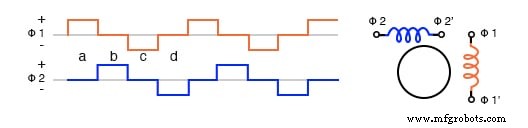
Golfvormen:bipolaire golfaandrijving
De golfvormen (figuur hierboven) zijn bipolair omdat beide polariteiten, (+) en (-) de stepper aansturen. Het magnetische veld van de spoel keert om omdat de polariteit van de aandrijfstroom omkeert.
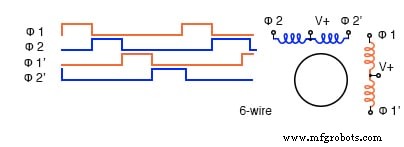
Golfvormen:unipolaire golfaandrijving
De golfvormen (figuur hierboven) zijn unipolair omdat er maar één polariteit nodig is. Dit vereenvoudigt de aandrijfelektronica, maar vereist twee keer zoveel drivers. Er zijn twee keer zoveel golfvormen omdat er een paar (+) golven nodig zijn om een wisselend magnetisch veld te produceren door toepassing op tegenovergestelde uiteinden van een centraal getapte spoel.
De motor vereist wisselende magnetische velden. Deze kunnen worden geproduceerd door unipolaire of bipolaire golven. Motorspoelen moeten echter middenaftakkingen hebben voor de unipolaire aandrijving.
Stappenmotoren met permanente magneet worden vervaardigd met verschillende aansluitdraadconfiguraties.
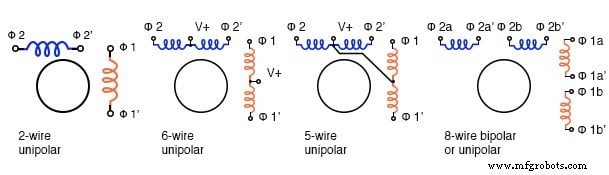
Bedradingsschema's voor stappenmotoren
- De 4-draads motor kan alleen worden aangedreven door bipolaire golfvormen.
- De 6-draads motor, de meest voorkomende opstelling, is bedoeld voor unipolaire aandrijving vanwege de middenaftakkingen. Het kan echter worden aangedreven door bipolaire golven als de middelste tikken worden genegeerd.
- De 5-draads motor kan alleen worden aangedreven door unipolaire golven, omdat de gemeenschappelijke middenaftakking interfereert als beide wikkelingen tegelijkertijd worden bekrachtigd.
- De 8-draads configuratie is zeldzaam, maar biedt maximale flexibiliteit. Het kan worden bedraad voor een unipolaire aandrijving zoals voor de 6-draads of 5-draads motor. Een paar spoelen kan in serie worden geschakeld voor bipolaire hoogspanningsaandrijving met lage stroom, of parallel voor laagspanningsaandrijving met hoge stroomsterkte.
Een bifilaire winding wordt geproduceerd door de spoelen met twee parallelle draden op te winden, vaak een rood en groen geëmailleerde draad. Deze methode produceert exacte 1:1 omwentelingenverhoudingen voor centraal getapte wikkelingen. Deze wikkelmethode is van toepassing op alles behalve de 4-draads opstelling hierboven.
Full Step Drive
Volledige stap aandrijving levert meer koppel dan golfaandrijving omdat beide spoelen tegelijkertijd worden bekrachtigd. Dit trekt de rotorpolen aan halverwege de twee veldpolen. (Figuur hieronder)
Volledige, bipolaire drive
De bipolaire aandrijving met volledige stap, zoals hierboven weergegeven, heeft dezelfde staphoek als de golfaandrijving. Unipolaire aandrijving (niet getoond) zou een paar unipolaire golfvormen vereisen voor elk van de bovengenoemde bipolaire golfvormen die worden toegepast op de uiteinden van een in het midden getapte wikkeling. De unipolaire aandrijving maakt gebruik van een minder complex, goedkoper stuurcircuit. De meerprijs van de bipolaire aandrijving is gerechtvaardigd wanneer meer koppel nodig is.
Halfstapsaandrijving
De staphoek voor een bepaalde stappenmotorgeometrie wordt gehalveerd met halve stap drijfveer. Dit komt overeen met twee keer zoveel stappulsen per omwenteling. (Figuur hieronder) Half stepping zorgt voor een grotere resolutie in de positionering van de motoras.
Als u bijvoorbeeld de motor half laat draaien en de printkop over het papier van een inkjetprinter beweegt, wordt de puntdichtheid verdubbeld.
Halve stap, bipolaire drive
Halve stapaandrijving is een combinatie van golfaandrijving en volledige stapaandrijving waarbij één wikkeling wordt geactiveerd, gevolgd door beide wikkelingen die worden geactiveerd, wat twee keer zoveel stappen oplevert. De unipolaire golfvormen voor halve stapaandrijving zijn hierboven weergegeven. De rotor is uitgelijnd met de veldpolen zoals voor golfaandrijving en tussen de polen zoals voor volledige stapaandrijving.
Microstepping is mogelijk met gespecialiseerde controllers. Door de stromen naar de wikkelingen sinusoïdaal te variëren, kunnen veel microstappen worden geïnterpoleerd tussen de normale posities. De constructie van een stappenmotor met permanente magneet wijkt aanzienlijk af van de bovenstaande tekeningen.
Het is wenselijk om het aantal polen te vergroten tot voorbij het geïllustreerde aantal om een kleinere staphoek te verkrijgen. Het is ook wenselijk om het aantal wikkelingen te verminderen, of in ieder geval niet het aantal wikkelingen te vergroten om de fabricage te vergemakkelijken.
Bouw
De constructie van een permanent magneet stappenmotor wijkt aanzienlijk af van de bovenstaande tekeningen. Het is wenselijk om het aantal polen te vergroten tot voorbij het geïllustreerde aantal om een kleinere staphoek te verkrijgen. Het is ook wenselijk om het aantal wikkelingen te verminderen, of in ieder geval niet het aantal wikkelingen te vergroten om de fabricage te vergemakkelijken.
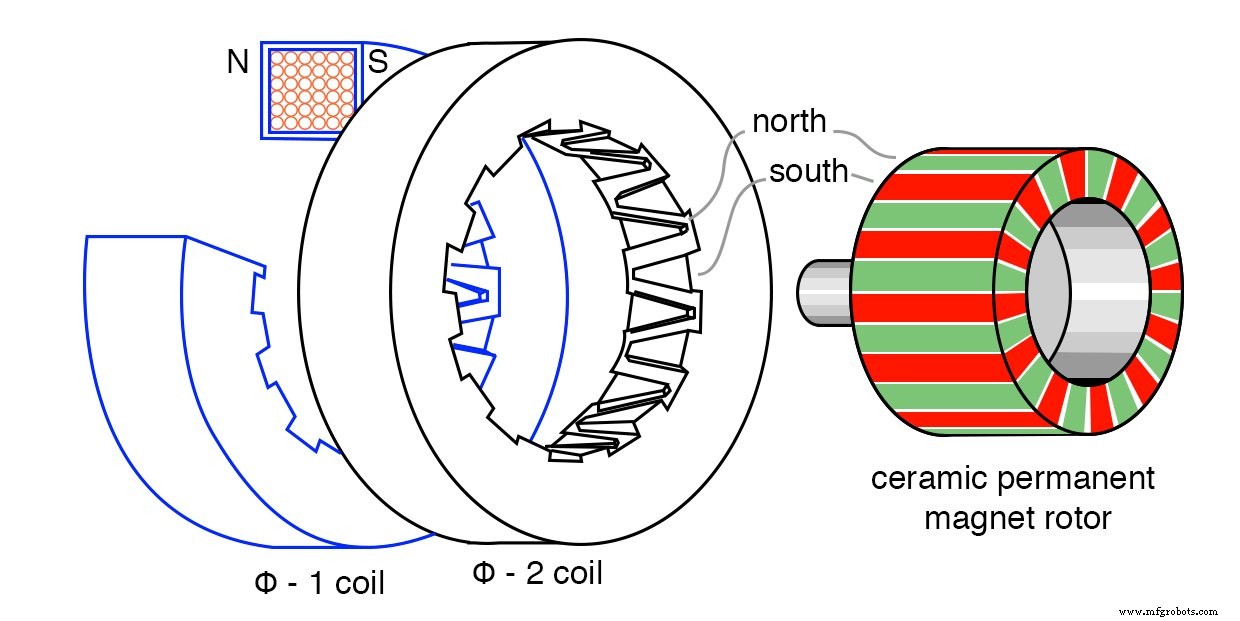
Permanente magneet stappenmotor, 24-polige can-stack constructie
De permanentmagneetstepper heeft slechts twee wikkelingen, maar heeft toch 24 polen in elk van de twee fasen. Deze bouwstijl staat bekend als can stack . Een fasewikkeling is omwikkeld met een zacht stalen omhulsel, met vingers naar het midden gebracht.
Eén fase, op tijdelijke basis, zal een noordkant en een zuidkant hebben. Elke kant wikkelt zich om het midden van de donut met twaalf in elkaar grijpende vingers voor in totaal 24 palen. Deze afwisselende noord-zuidvingers zullen de permanente magneetrotor aantrekken.
Als de polariteit van de fase zou worden omgekeerd, zou de rotor 360° . springen /24 =15° . We weten niet welke richting, wat niet handig is. Als we echter φ-1 activeren, gevolgd door φ-2, zal de rotor 7,5° verplaatsen omdat de φ-2 is verschoven (gedraaid) met 7,5° van φ-1. Zie hieronder voor offset. En het zal in een reproduceerbare richting draaien als de fasen worden afgewisseld.
Toepassing van een van de bovenstaande golfvormen zal de permanente magneetrotor draaien.
Merk op dat de rotor een grijze ferrietkeramische cilinder is, gemagnetiseerd in het getoonde 24-polige patroon. Dit kan worden bekeken met magneet-kijkfolie of ijzervijlsel dat op een papieren verpakking is aangebracht. De kleuren zullen echter groen zijn voor zowel de noord- als de zuidpool met de film.
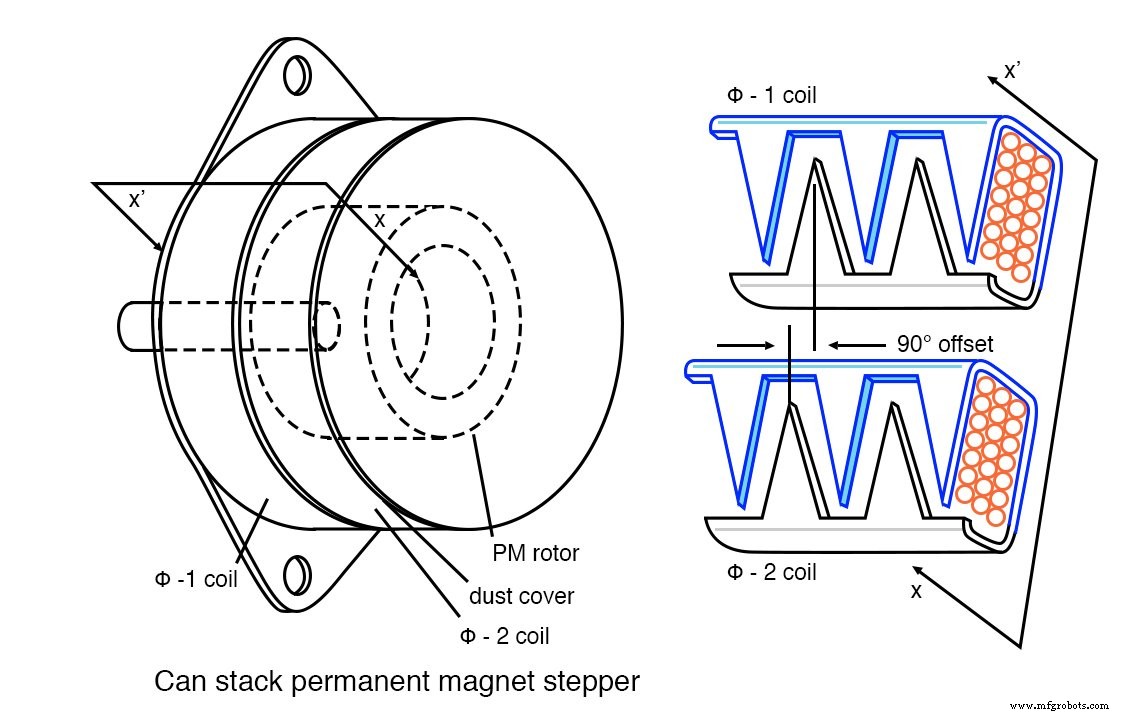
(a) Externe weergave van blikstapel, (b) veld offset detail
De constructie in blik-stapelstijl van een PM-stepper is onderscheidend en gemakkelijk te herkennen aan de gestapelde "blikken" (afbeelding hierboven). Let op de rotatieoffset tussen de tweefasige secties. Dit is de sleutel om ervoor te zorgen dat de rotor het schakelen van de velden tussen de twee fasen volgt.
Samenvatting:stappenmotor met permanente magneet
- De rotor is een permanente magneet, vaak een ferriethuls gemagnetiseerd met talrijke polen.
- Can-stack-constructie biedt talrijke palen van een enkele spoel met verweven vingers van zacht ijzer.
- Grote tot gemiddelde staphoek.
- Vaak gebruikt in computerprinters om het papier door te voeren.
Hybride stappenmotor
De hybride stappenmotor combineert eigenschappen van zowel de variabele reluctantie-stepper als de permanente-magneetstepper om een kleinere staphoek te produceren. De rotor is een cilindrische permanente magneet, gemagnetiseerd langs de as met radiale zachtijzeren tanden.
De statorspoelen zijn op wisselpalen met bijbehorende tanden gewikkeld. Er zijn typisch twee wikkelfasen verdeeld over poolparen. Deze wikkeling kan in het midden worden getapt voor een unipolaire aandrijving. De middenaftakking wordt bereikt door een bifilaire wikkeling , een paar draden fysiek parallel gewikkeld maar in serie geschakeld.
De noord-zuidpolen van een fasewisselpolariteit wanneer de faseaandrijfstroom wordt omgekeerd. De bipolaire aandrijving is vereist voor niet-afgeboorde wikkelingen.
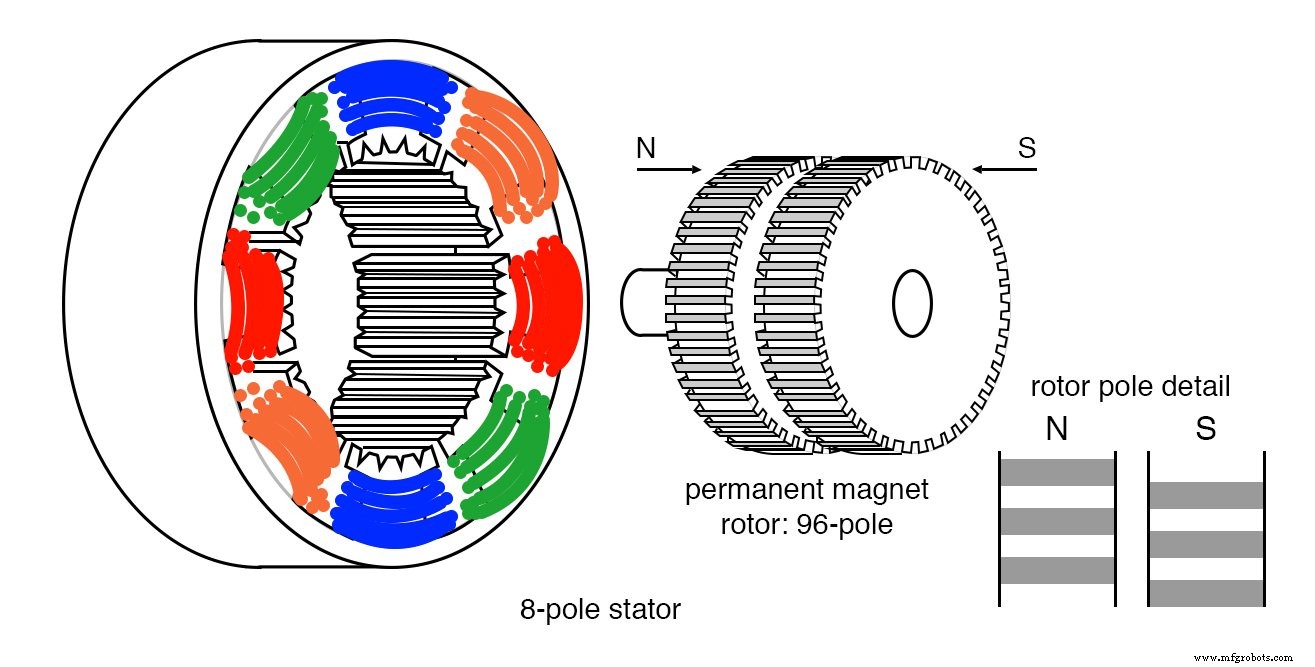
Hybride stappenmotor
Merk op dat de 48-tanden op het ene rotorgedeelte met een halve spoed van het andere zijn verschoven. (Zie het detail van de rotorpool hierboven. Deze rotortand-offset wordt ook hieronder getoond.) Door deze offset heeft de rotor in feite 96 verweven polen met tegengestelde polariteit.
Deze offset maakt rotatie in stappen van 1/96 e van een omwenteling mogelijk door de veldpolariteit van één fase om te keren. Tweefasige wikkelingen zijn gebruikelijk, zoals hierboven en hieronder weergegeven. Er kunnen echter wel vijf fasen zijn.
De statortanden op de 8-polen komen overeen met de 48-rotortanden, behalve de ontbrekende tanden in de ruimte tussen de polen. Zo kan een pool van de rotor, zeg maar de zuidpool, in 48 verschillende posities op één lijn liggen met de stator. De tanden van de zuidpool zijn echter een halve tand verschoven ten opzichte van de noordtanden.
Daarom kan de rotor in 96 verschillende posities op één lijn liggen met de stator. Deze offset van een halve tand wordt weergegeven in het detail van de rotorpool hierboven of in de onderstaande afbeelding.
Alsof dit nog niet ingewikkeld genoeg is, zijn de hoofdpolen van de stator verdeeld in twee fasen (φ-1, φ-2). Deze statorfasen zijn met een kwart tand van elkaar verschoven. Dit detail is alleen zichtbaar op de onderstaande schematische diagrammen. Het resultaat is dat de rotor in stappen van een kwart tand beweegt wanneer de fasen afwisselend worden bekrachtigd.
Met andere woorden, de rotor beweegt in 2×96=192 stappen per omwenteling voor de bovenstaande stepper.
De bovenstaande tekening is representatief voor een echte hybride stappenmotor. We bieden echter een vereenvoudigde picturale en schematische weergave om details te illustreren die hierboven niet duidelijk zijn. Let voor de eenvoud op het verminderde aantal spoelen en tanden in rotor en stator.
In de volgende twee figuren proberen we de kwarttandrotatie te illustreren die wordt geproduceerd door de twee statorfasen die met een kwart tand zijn verschoven, en de halve tandverschuiving van de rotor. De offset van de kwarttandstator in combinatie met de timing van de aandrijfstroom bepaalt ook de draairichting.
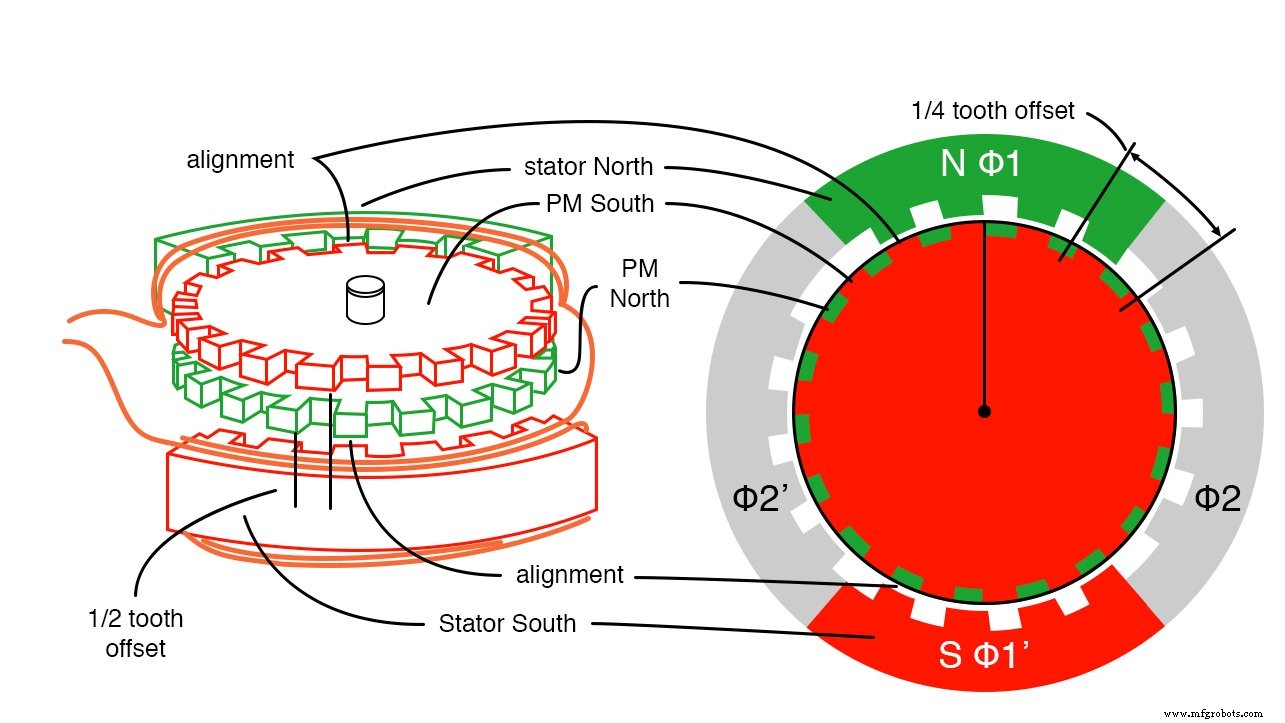
Hybride stappenmotor schematisch diagram
Kenmerken van hybride stappenschema
- De bovenkant van de permanentmagneetrotor is de zuidpool, de onderkant naar het noorden.
- De noord-zuid tanden van de rotor zijn een halve tand verschoven.
- Als de φ-1 stator tijdelijk wordt bekrachtigd noord boven, zuid onder.
- De bovenste φ-1 statortanden zijn noordelijk uitgelijnd met de bovenste zuidtanden van de rotor.
- De onderste φ-1' statortanden zijn zuidelijk uitgelijnd met de onderste noordtanden van de rotor.
- Voldoende koppel dat op de as wordt uitgeoefend om het vasthoudkoppel te overwinnen, zou de rotor één tand verplaatsen.
- Als de polariteit van φ-1 zou worden omgekeerd, zou de rotor met een halve tand bewegen, richting onbekend. De uitlijning is de zuid-stator boven naar de noord-rotor-bodem, de noord-stator-bodem naar de zuid-rotor.
- De φ-2 statortanden zijn niet uitgelijnd met de rotortanden wanneer φ-1 wordt bekrachtigd. In feite zijn de φ-2 statortanden gecompenseerd door een kwart tand. Dit maakt rotatie met die hoeveelheid mogelijk als φ-1 is uitgeschakeld en φ-2 is geactiveerd. De polariteit van φ-1 en aandrijving bepalen de draairichting.
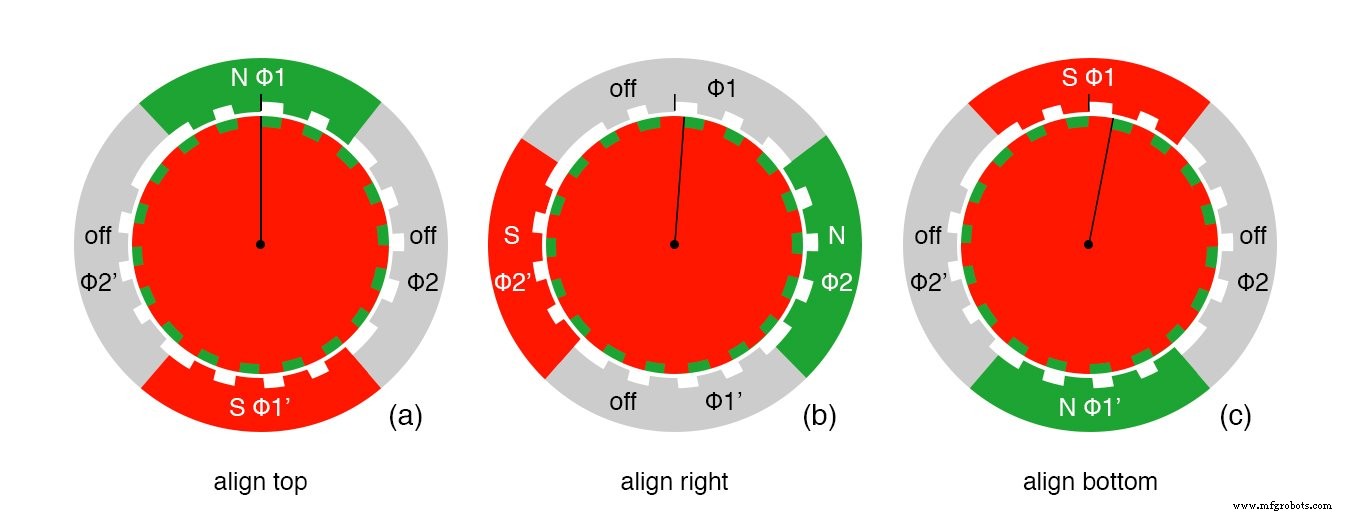
Hybride stappenmotor rotatievolgorde
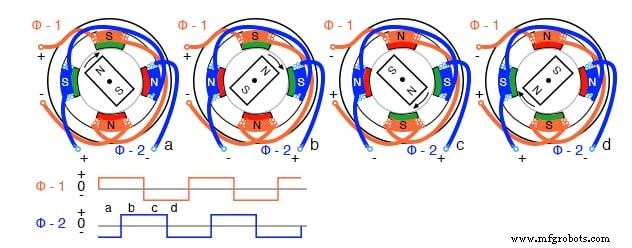
Hybride stappenmotorrotatie
- Rotor bovenkant is permanente magneet zuid, onderkant noord. Velden φ1, φ-2 zijn omschakelbaar:aan, uit, omgekeerd.
- (a) φ-1=aan=noord-top, φ-2=uit. Uitlijnen (van boven naar beneden): φ-1 stator-N:rotor-top-S, φ-1' stator-S:rotor-bottom-N. Startpositie, rotatie=0.
- (b) φ-1=uit, φ-2=aan. Uitlijnen (van rechts naar links): φ-2 stator-N-rechts:rotor-top-S, φ-2' stator-S:rotor-bottom-N. Draai 1/4 tand, totale rotatie =1/4 tand.
- (c) φ-1=omgekeerd(aan), φ-2=uit. Uitlijnen (van onder naar boven): φ-1 stator-S:rotor-onder-N, φ-1' stator-N:rotor-top-S. Draai 1/4 tand vanaf de laatste positie. Totale rotatie vanaf het begin:1/2 tand.
- Niet weergegeven:φ-1=uit, φ-2=omgekeerd(aan). Uitlijnen (van links naar rechts): Totale rotatie:3/4 tand.
- Niet weergegeven:φ-1=aan, φ-2=uit (hetzelfde als (a)). Uitlijnen (van boven naar beneden): Totale rotatie 1-tand.
Een niet-aangedreven stappenmotor met arreteerkoppel is ofwel een permanente magneetstepper of een hybride stepper. De hybride stepper heeft een kleine staphoek, veel minder dan de 7,5° van permanente magneet steppers. De staphoek kan een fractie van een graad zijn, wat overeenkomt met een paar honderd stappen per omwenteling. Samenvatting:hybride stappenmotor
- De staphoek is kleiner dan variabele reluctantie of permanente magneetsteppers.
- De rotor is een permanente magneet met fijne tanden. De noordelijke en zuidelijke tanden zijn een halve tand verschoven voor een kleinere staphoek.
- De statorpolen hebben bijpassende fijne tanden met dezelfde spoed als de rotor.
- De statorwikkelingen zijn verdeeld in maar liefst twee fasen.
- De polen van één statorwikkeling zijn met een kwart tand verschoven voor een nog kleinere staphoek.
GERELATEERD WERKBLAD:
- Werkblad Stappenmotoren
Industriële technologie
- Inleiding tot AC-motoren
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Nanotec:compacte motorcontroller voor borstelloze gelijkstroommotoren en stappenmotoren
- Technische tip:motoren
- Het grijze gebied tussen servo- en stappenmotoren
- Elektromotorveiligheid:verschillende fasen en veiligheidsmaatregelen
- 4 belangrijke soorten wikkelfouten in AC-elektromotoren
- Over industriële motoren en toepassingen
- Een inleiding tot de BLDC-motor
- Goed onderhoud van compressormotoren