


Synchrone tellers
Wat is een Synchroon Teller?
Een synchrone teller , in tegenstelling tot een asynchrone teller , is er een waarvan de uitvoerbits tegelijkertijd van status veranderen, zonder rimpel.
De enige manier waarop we zo'n tegenschakeling van J-K-flip-flops kunnen bouwen, is door alle klokingangen met elkaar te verbinden, zodat elke flip-flop exact dezelfde klokpuls op exact hetzelfde moment ontvangt:
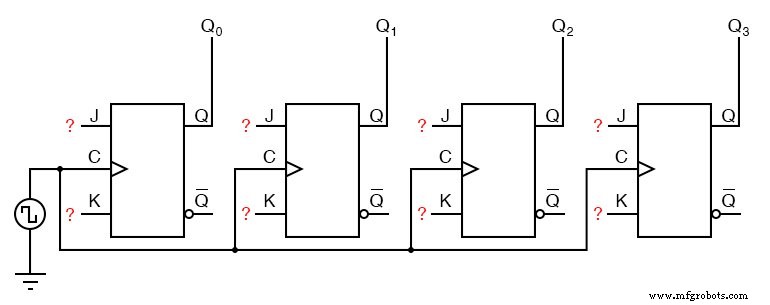
Nu is de vraag, wat doen we met de J- en K-ingangen? We weten dat we nog steeds hetzelfde frequentiepatroon van gedeeld door twee moeten behouden om in een binaire reeks te tellen, en dat dit patroon het best kan worden bereikt door gebruik te maken van de "toggle" -modus van de flip-flop, dus het feit dat de J- en K-ingangen moeten beide (soms) "hoog" zijn, is duidelijk.
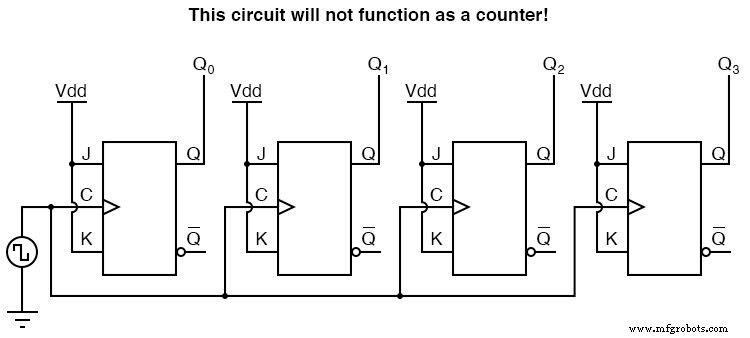
Als we echter gewoon alle J- en K-ingangen op de positieve rail van de voeding aansluiten, zoals we deden in het asynchrone circuit, zou dit duidelijk niet werken omdat alle flip-flops tegelijkertijd zouden schakelen:met elke klokpuls!
Laten we de vier-bits binaire telreeks opnieuw bekijken en kijken of er andere patronen zijn die het wisselen van een bit voorspellen.
Het ontwerp van een asynchrone tellerschakeling is gebaseerd op het feit dat elke bitwissel plaatsvindt op hetzelfde moment dat de voorgaande bit wisselt van "hoog" naar "laag" (van 1 tot 0).
Aangezien we het omschakelen van een bit niet kunnen klokken op basis van het omschakelen van een vorig bit in een synchrone tellerschakeling (dit zou een rimpeleffect creëren), moeten we een ander patroon in de telreeks vinden dat kan worden gebruikt om een bit te activeren schakelen:
Als we de vier-bits binaire telreeks onderzoeken, zien we een ander voorspellend patroon.
Merk op dat net voordat een bit omschakelt, alle voorgaande bits "hoog" zijn:
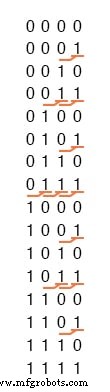
Dit patroon is ook iets dat we kunnen gebruiken bij het ontwerpen van een tegencircuit.
Synchroon Teller "Omhoog"
Als we elke JK-flip-flop in staat stellen om te schakelen op basis van het feit of alle voorgaande flip-flop-uitgangen (Q) "hoog" zijn, kunnen we dezelfde telreeks verkrijgen als de asynchrone schakeling zonder het rimpeleffect, aangezien elke flip-flop in dit circuit wordt op exact hetzelfde tijdstip geklokt:
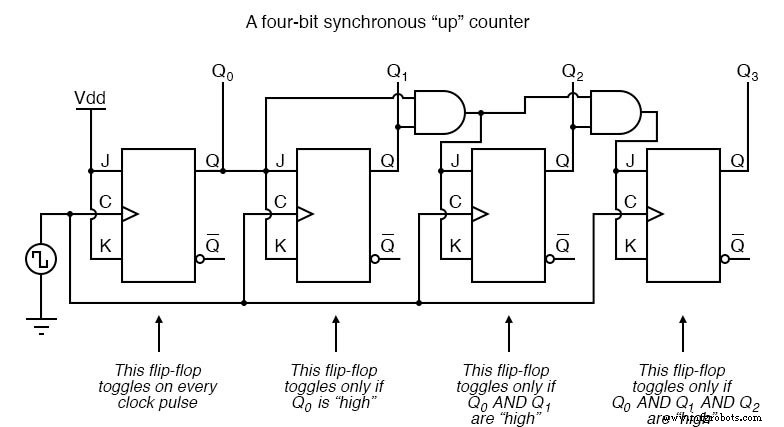
Het resultaat is een vier-bits synchrone "omhoog" teller. Elk van de hogere-orde flip-flops is klaar om te schakelen (zowel J- als K-ingangen "hoog") als de Q-uitgangen van alle voorgaande flip-flops "hoog" zijn.
Anders zullen de J- en K-ingangen voor die flip-flop beide "laag" zijn, waardoor deze in de "latch" -modus wordt geplaatst waar deze zijn huidige uitgangsstatus behoudt bij de volgende klokpuls.
Aangezien de eerste (LSB) flip-flop bij elke klokpuls moet schakelen, zijn zijn J- en K-ingangen verbonden met Vcc of Vdd , waar ze de hele tijd "hoog" zullen zijn.
De volgende flip-flop hoeft alleen maar te "herkennen" dat de Q-uitgang van de eerste flip-flop hoog is om klaar te worden gemaakt om te schakelen, dus er is geen EN-poort nodig.
De resterende flip-flops moeten echter alleen klaar worden gemaakt om te wisselen wanneer alle lagere-orde output bits zijn "hoog", dus de behoefte aan EN-poorten.
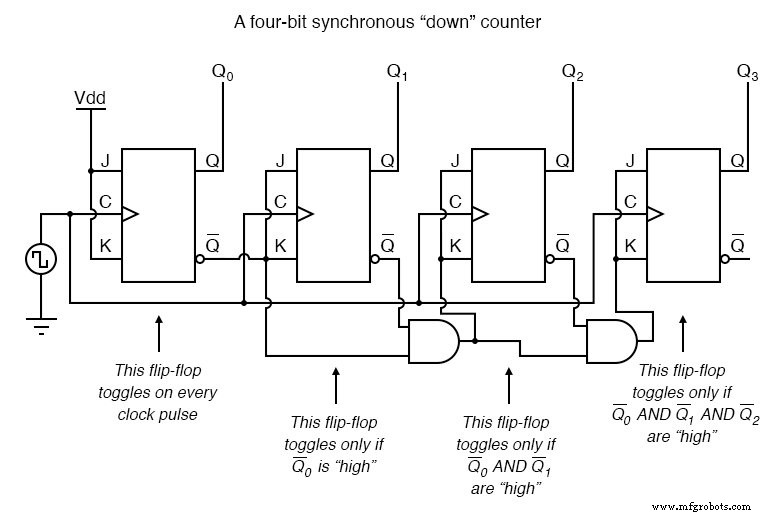
Synchrone “omlaag”-teller
Om een synchrone "af"-teller te maken, moeten we het circuit bouwen om de juiste bitpatronen te herkennen die elke schakeltoestand voorspellen tijdens het aftellen.
Het is niet verrassend dat wanneer we de vier-bits binaire telreeks onderzoeken, we zien dat alle voorgaande bits "laag" zijn voorafgaand aan een toggle (de reeks van beneden naar boven volgen):

Aangezien elke JK-flip-flop is uitgerust met een Q'-uitgang en een Q-uitgang, kunnen we de Q'-uitgangen gebruiken om de toggle-modus op elke volgende flip-flop in te schakelen, waarbij elke Q' elke keer "hoog" zal zijn. tijd dat de respectievelijke Q "laag" is:
Tegenschakeling met selecteerbare "omhoog" en "omlaag" telmodi
Door dit idee nog een stap verder te brengen, kunnen we een tellercircuit bouwen met selecteerbare telmodi "omhoog" en "omlaag" door dubbele lijnen van EN-poorten te hebben die de juiste bitvoorwaarden detecteren voor een "omhoog" en een "omlaag" telreeks, gebruik dan OF-poorten om de EN-poortuitgangen te combineren met de J- en K-ingangen van elke volgende flip-flop:
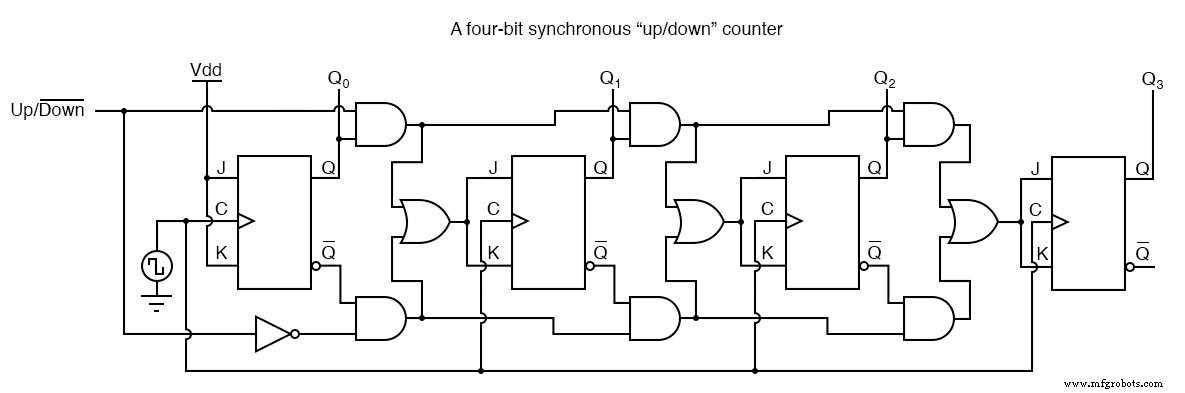
Dit circuit is niet zo ingewikkeld als het in eerste instantie lijkt. De omhoog/omlaag-besturingsingangslijn zorgt ervoor dat de bovenste of onderste reeks EN-poorten eenvoudig de Q/Q'-uitgangen kunnen doorgeven aan de volgende fasen van flip-flops.
Als de regellijn omhoog/omlaag "hoog" is, worden de bovenste EN-poorten ingeschakeld en functioneert het circuit precies hetzelfde als het eerste ("omhoog") synchrone tellercircuit dat in deze sectie wordt getoond.
Als de regellijn omhoog/omlaag "laag" wordt gemaakt, worden de onderste EN-poorten ingeschakeld en functioneert het circuit identiek aan het tweede ("omlaag" -teller) circuit dat in deze sectie wordt getoond.
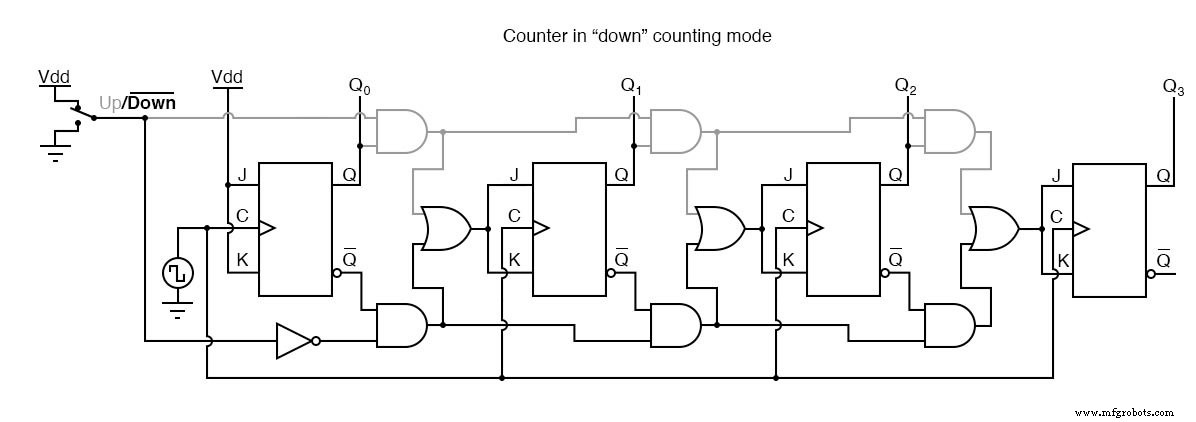
Ter illustratie, hier is een diagram dat het circuit toont in de "omhoog" telmodus (alle uitgeschakelde circuits worden grijs weergegeven in plaats van zwart):

Hier, weergegeven in de "down"-telmodus, met dezelfde grijze kleur die uitgeschakelde circuits voorstelt:
Up/down counter-circuits zijn zeer nuttige apparaten. Een veel voorkomende toepassing is de bewegingsbesturing van machines, waarbij apparaten die roterende as-encoders . worden genoemd, zet mechanische rotatie om in een reeks elektrische pulsen, deze pulsen "klokken" een tellercircuit om de totale beweging te volgen:
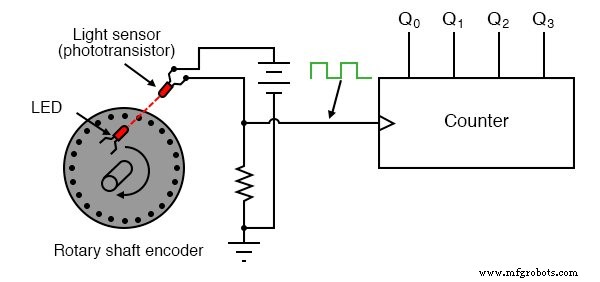
Terwijl de machine beweegt, draait hij de encoderas, waardoor de lichtstraal tussen LED en fototransistor wordt gemaakt en verbroken, waardoor klokpulsen worden gegenereerd om het tellercircuit te verhogen.
De teller integreert of accumuleert dus de totale beweging van de as en dient als een elektronische indicatie van hoe ver de machine is verplaatst.
Als alles waar we om geven het volgen van totale beweging is, en het ons niet kan schelen om rekening te houden met veranderingen in de richting beweging, is deze opstelling voldoende.
Als we echter willen dat de teller verhoogt met één bewegingsrichting en verlagen met de omgekeerde bewegingsrichting moeten we een op/neer-teller gebruiken en een encoder/decodeercircuit dat onderscheid kan maken tussen verschillende richtingen.
Als we de encoder opnieuw ontwerpen om twee sets LED/fototransistor-paren te hebben, zijn die paren zodanig uitgelijnd dat hun blokgolfuitgangssignalen 90 o zijn uit fase met elkaar zijn, hebben we wat bekend staat als een kwadratuuruitgang encoder (het woord "kwadratuur" verwijst eenvoudig naar een 90 o hoekscheiding).
Een fasedetectiecircuit kan worden gemaakt van een D-type flip-flop, om een pulsreeks met de klok mee te onderscheiden van een pulsreeks tegen de klok in:
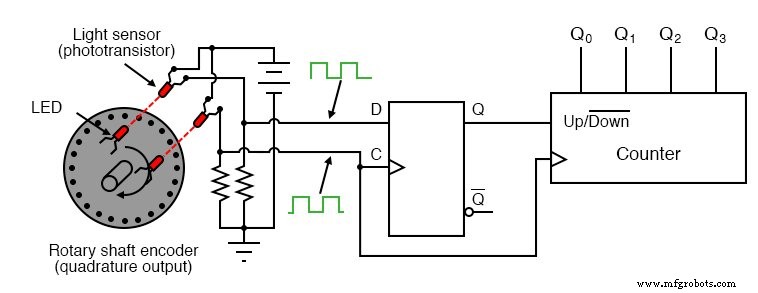
Wanneer de encoder met de klok mee draait, zal het "D" ingangssignaal blokgolf de "C" invoer blokgolf leiden, wat betekent dat de "D" ingang al "hoog" zal zijn wanneer de "C" overgaat van "laag" naar "hoog", dus instelling de D-type flip-flop (waardoor de Q-uitgang "hoog" wordt) bij elke klokpuls.
Een "hoge" Q-uitgang plaatst de teller in de "omhoog"-telmodus en alle klokpulsen die door de klok worden ontvangen van de encoder (van beide LED's) zullen deze verhogen.
Omgekeerd, wanneer de encoder de rotatie omkeert, zal de "D" -invoer achterblijven bij de "C" -ingangsgolfvorm, wat betekent dat deze "laag" zal zijn wanneer de "C"-golfvorm overgaat van "laag" naar "hoog", waardoor de D wordt gedwongen -type flip-flop in de reset staat (waardoor de Q-uitgang "laag" wordt) bij elke klokpuls.
Dit "lage" signaal geeft het tellercircuit de opdracht om met elke klokpuls van de encoder te verlagen.
Dit circuit, of iets dat er erg op lijkt, vormt het hart van elk positiemeetcircuit op basis van een pulsgeversensor.
Dergelijke toepassingen zijn heel gebruikelijk in robotica, besturing van CNC-bewerkingsmachines en andere toepassingen waarbij omkeerbare, mechanische bewegingen worden gemeten.
GERELATEERDE WERKBLAD:
- Synchroon teller-werkblad
Industriële technologie