


Ontwerpen van een snel reagerend feedbacksysteem voor geminiaturiseerde motoraangedreven ontwerpen
Informatie over motorrotatie, zoals positie, snelheid en richting, moet nauwkeurig zijn om nauwkeurige drivers en controllers te produceren voor een breed scala aan opkomende toepassingen, bijvoorbeeld in pick-and-place-machines die microscopisch kleine componenten in de beperkte printplaat monteren (PCB) gebied. Onlangs zijn motorbesturingen geminiaturiseerd, waardoor nieuwe toepassingen mogelijk zijn in chirurgische robotica voor de gezondheidszorg en in drones voor ruimtevaart en defensie. De kleinere motorcontrollers maken ook nieuwe toepassingen in industriële en commerciële installaties mogelijk. De uitdaging voor ontwerpers is om te voldoen aan de hoge nauwkeurigheidsvereiste van de positiefeedbacksensor in een snelle toepassing, terwijl tegelijkertijd alle componenten in de beperkte PCB-ruimte worden gegoten om in kleine behuizingen te passen, zoals een robotarm.
klik voor grotere afbeelding
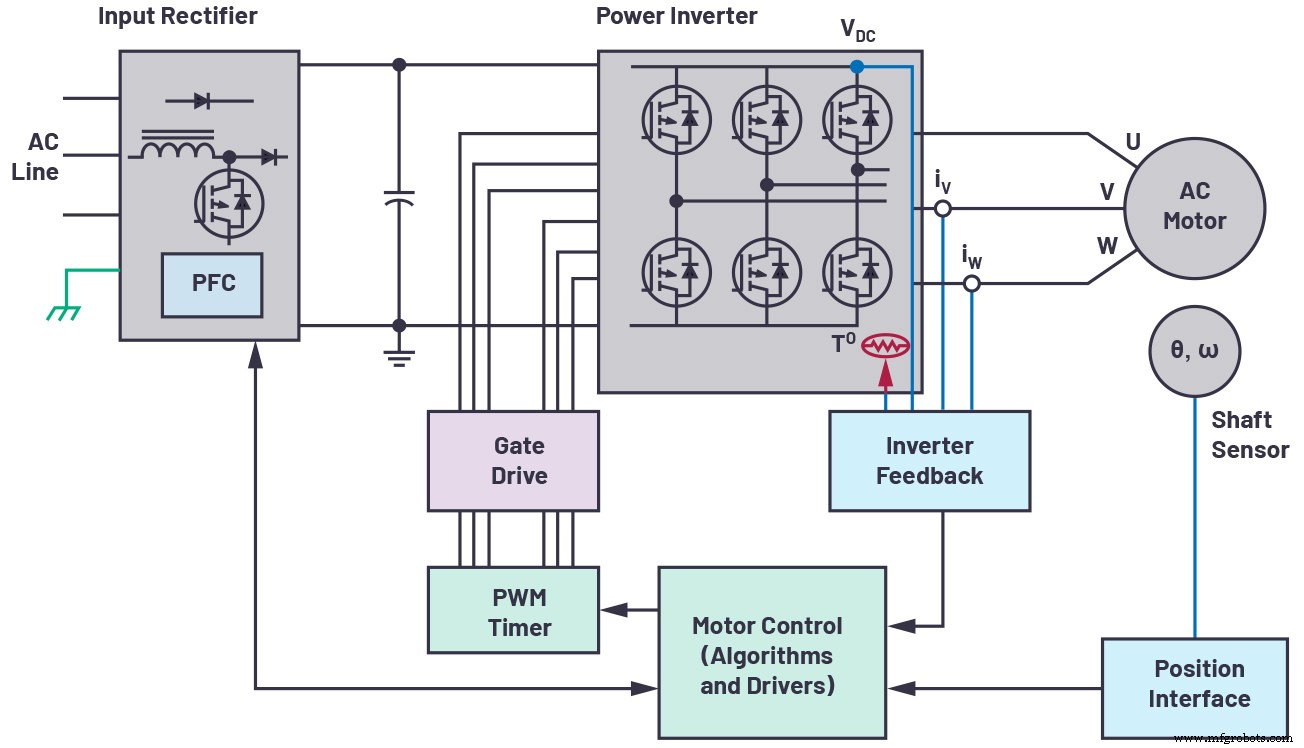
Figuur 1. Terugkoppelingssysteem voor motorbesturing. (Bron:Analog Devices, Inc.)
Motorbesturing
Motorregellussen, zoals te zien in figuur 1, bestaan voornamelijk uit een motor, een controller en een positie-feedback-interface. De motor draait een roterende as die ervoor zorgt dat de armen van een machine dienovereenkomstig bewegen. De motorcontroller vertelt de motor wanneer hij kracht moet uitoefenen, moet stoppen of moet blijven draaien. De positie-interface in de lus levert informatie over de rotatiesnelheid en positie aan de controller. Deze gegevens staan centraal voor de goede werking van een pick-and-place-machine voor de assemblage van een kleine PCB voor opbouwmontage. Al deze toepassingen vereisen nauwkeurige positiemeetinformatie over het roterende object.
De resolutie van de positiesensor moet zeer hoog zijn - genoeg om de positie van de motoras nauwkeurig te detecteren, een klein onderdeel correct op te pakken en nauwkeurig op een bord te plaatsen. Hogere motorrotatiesnelheden leiden ook tot hogere lusbandbreedte en lagere latentievereisten.
Positie-feedbacksysteem
In een lagere toepassing kan een incrementele sensor samen met een comparator voldoende zijn voor positiewaarneming, terwijl een hogere toepassing meer complexe signaalketens vereist. Deze feedbacksystemen omvatten de positiesensor, gevolgd door analoge front-end signaalconditionering, de analoog-naar-digitaalomzetter (ADC) en de driver voordat de gegevens in het digitale domein komen.
Een van de meest nauwkeurige positiesensoren is de optische encoder. Een optische encoder bestaat uit een lichtbron met een lichtgevende diode (LED), een gemarkeerde schijf die aan de motoras is bevestigd en een fotodetector. De schijf heeft een gemaskeerd patroon van ondoorzichtige en transparante gebieden die het licht verduisteren of doorlaten. De fotodetectoren nemen het resulterende licht waar en de aan/uit-lichtsignalen worden omgezet in elektrische signalen.
Terwijl de schijf draait, produceren de fotodetectoren - in combinatie met de patronen van de schijf - kleine sinus- en cosinussignalen, in het mV- of µV-niveau. Dit systeem is typisch voor een optische encoder met absolute positie. Deze signalen worden toegevoerd aan een analoog signaalconditioneringscircuit, dat gewoonlijk bestaat uit een discrete versterker of een analoge programmeerbare versterkingsversterker (PGA) om het signaal te versterken tot het piek-tot-piekbereik van 1 V, wat gewoonlijk past bij een ADC-ingangsspanningsbereik voor maximaal dynamisch bereik. Elk van de versterkte sinus- en cosinussignalen wordt vervolgens verkregen door een ADC-stuurprogrammaversterker met gelijktijdige bemonstering.
De ADC moet gelijktijdige bemonstering op zijn kanalen bieden, zodat de sinus- en cosinusgegevenspunten op exact hetzelfde tijdstip worden genomen, aangezien die combinatie de aspositie-informatie levert. De ADC-conversieresultaten worden doorgegeven aan een toepassingsspecifieke geïntegreerde schakeling (ASIC) of microcontroller. De motorcontroller bevraagt de positie van de encoder bij elke PWM-cyclus (pulsbreedtemodulatie) en gebruikt deze gegevens om de motor aan te drijven op basis van de ontvangen instructies. In het verleden moesten systeemontwerpers de ADC-snelheid of het aantal kanalen inruilen om te passen bij de beperkte voetafdruk van het bord.
klik voor grotere afbeelding
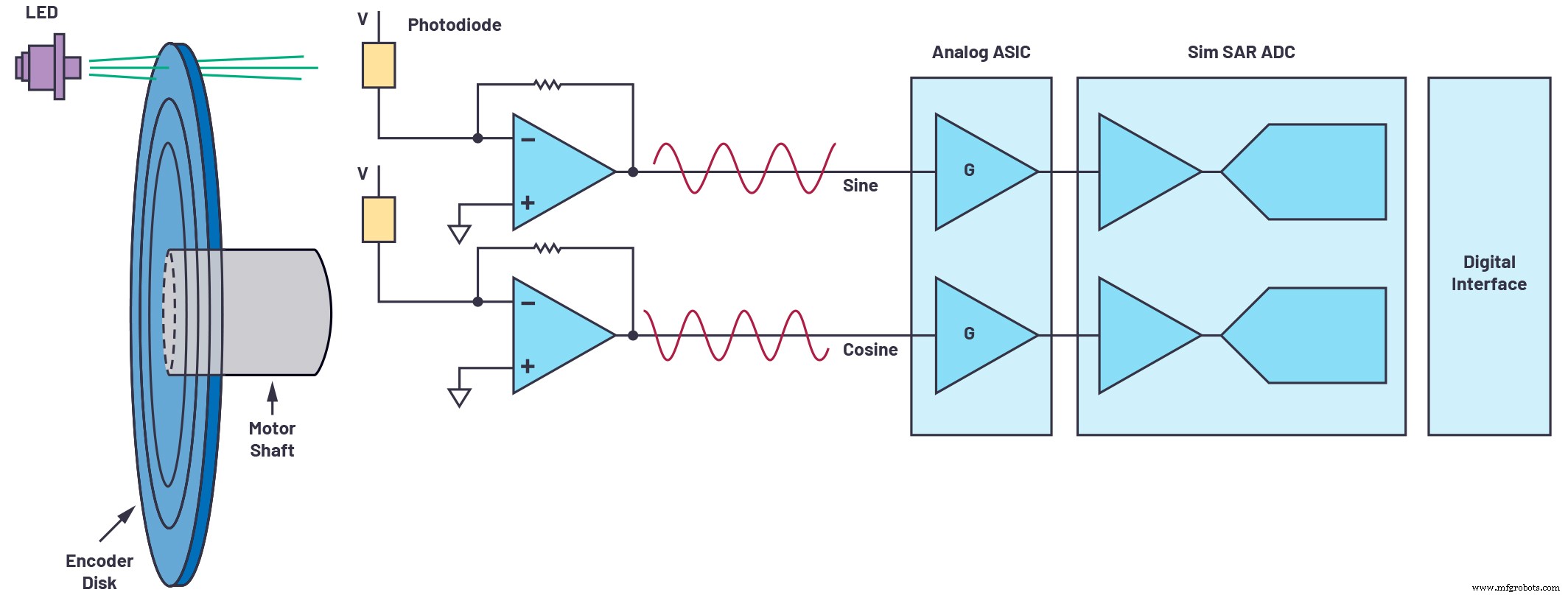
Figuur 2. Positie feedback systeem. (Bron:Analog Devices, Inc.)
Positiefeedback optimaliseren
De eisen van evoluerende technologie hebben geresulteerd in innovatie in motorbesturingstoepassingen die positiedetectie met hoge nauwkeurigheid vereisen. De resolutie van de optische encoder kan worden gebaseerd op het aantal slots dat is ingeschreven vanuit fijne lithografie op een schijf, meestal honderden of duizenden.
Door deze sinus- en cosinussignalen te interpoleren naar een ADC met hoge snelheid en hoge prestaties, kunnen we encoders met een hogere resolutie maken zonder dat systeemwijzigingen aan de encoderschijf nodig zijn. Wanneer bijvoorbeeld een encodersinus- en cosinussignaal met een lagere snelheid worden bemonsterd, worden minder waarden van het signaal vastgelegd, zoals weergegeven in figuur 3; dit beperkt ook de nauwkeurigheid van de positielimiet.
klik voor grotere afbeelding
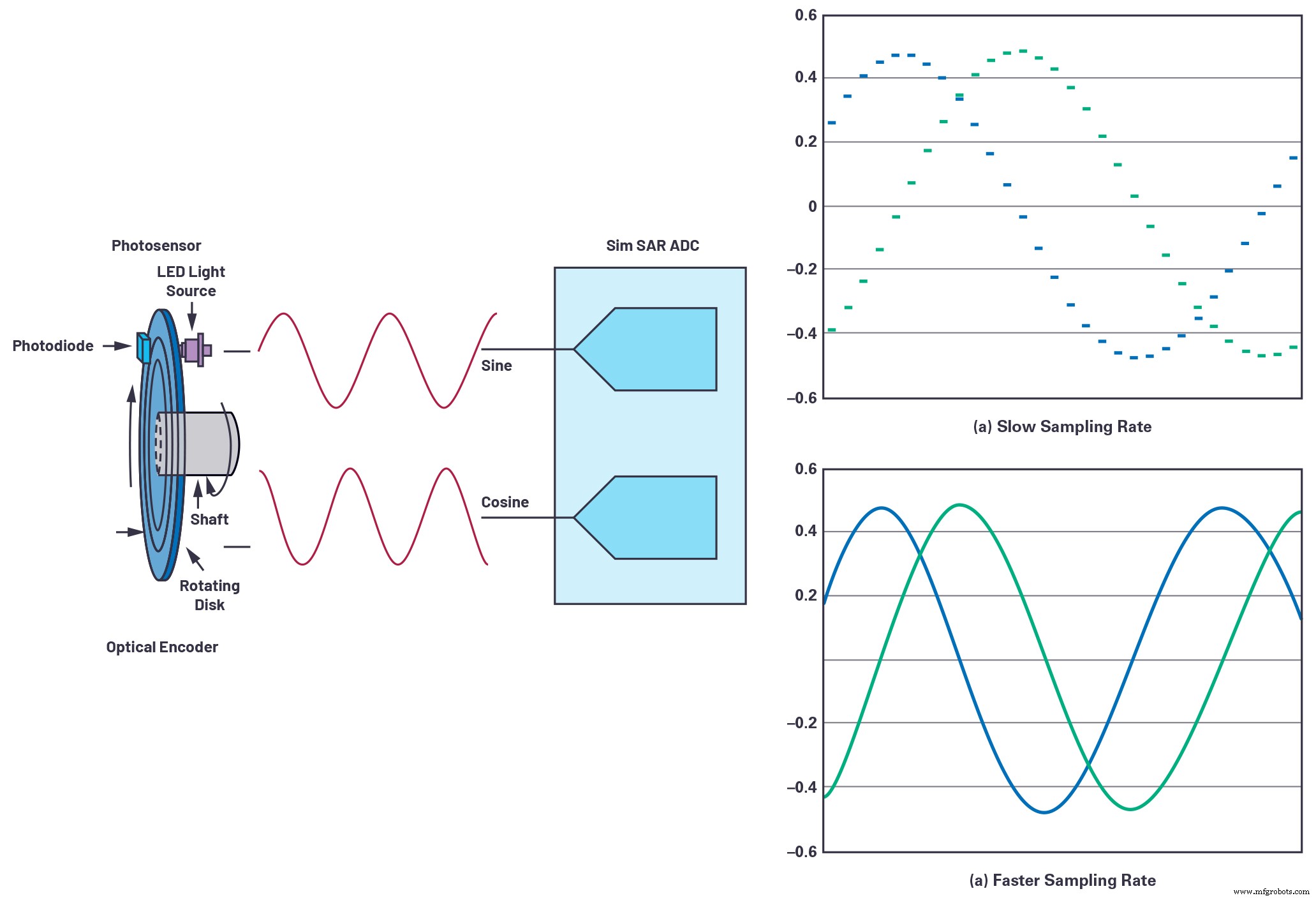
Figuur 3. Bemonsteringsfrequentie. (Bron:Analog Devices, Inc.)
In figuur 3 worden, wanneer de ADC sneller monsters neemt, meer gedetailleerde waarden van het signaal vastgelegd en wordt een positie met een hogere nauwkeurigheid bepaald. Een hoge bemonsteringssnelheid van de ADC maakt oversampling mogelijk, waardoor de ruisprestaties verder worden verbeterd en sommige digitale nabewerkingsbehoeften worden weggenomen. Tegelijkertijd vermindert het de uitvoergegevenssnelheid van de ADC; dat wil zeggen, waardoor langzamere seriële frequentiesignalen mogelijk zijn, waardoor de digitale interface wordt vereenvoudigd. Het feedbacksysteem voor de motorpositie is gemonteerd in de motorconstructie, die bij bepaalde toepassingen vrij klein kan zijn. Het formaat is dus van vitaal belang om in het beperkte PCB-gebied van de encodermodule te passen. De opkomst van meerdere kanaalcomponenten in een enkel, klein pakket is het meest geschikt om ruimte te besparen.
Optische Encoder Positie Feedback Ontwerpvoorbeeld
Een voorbeeld van een geoptimaliseerd optisch encoderpositiefeedbacksysteem wordt getoond in figuur 4. Het circuit kan worden gekoppeld aan een absoluut type optische encoder waar differentiële sinus- en cosinussignalen van de encoder door het circuit kunnen worden opgevangen. Afbeelding 4 toont een ADA4940-2 front-end, tweekanaals, volledig differentiële versterker die de ADC aandrijft, in dit geval een AD7380, een tweekanaals, 16-bits, volledig differentiële, 4 MSPS, simultaneous sampling SAR ADC, gehuisvest in een klein LFCSP-pakket van 3 mm × 3 mm.
klik voor grotere afbeelding
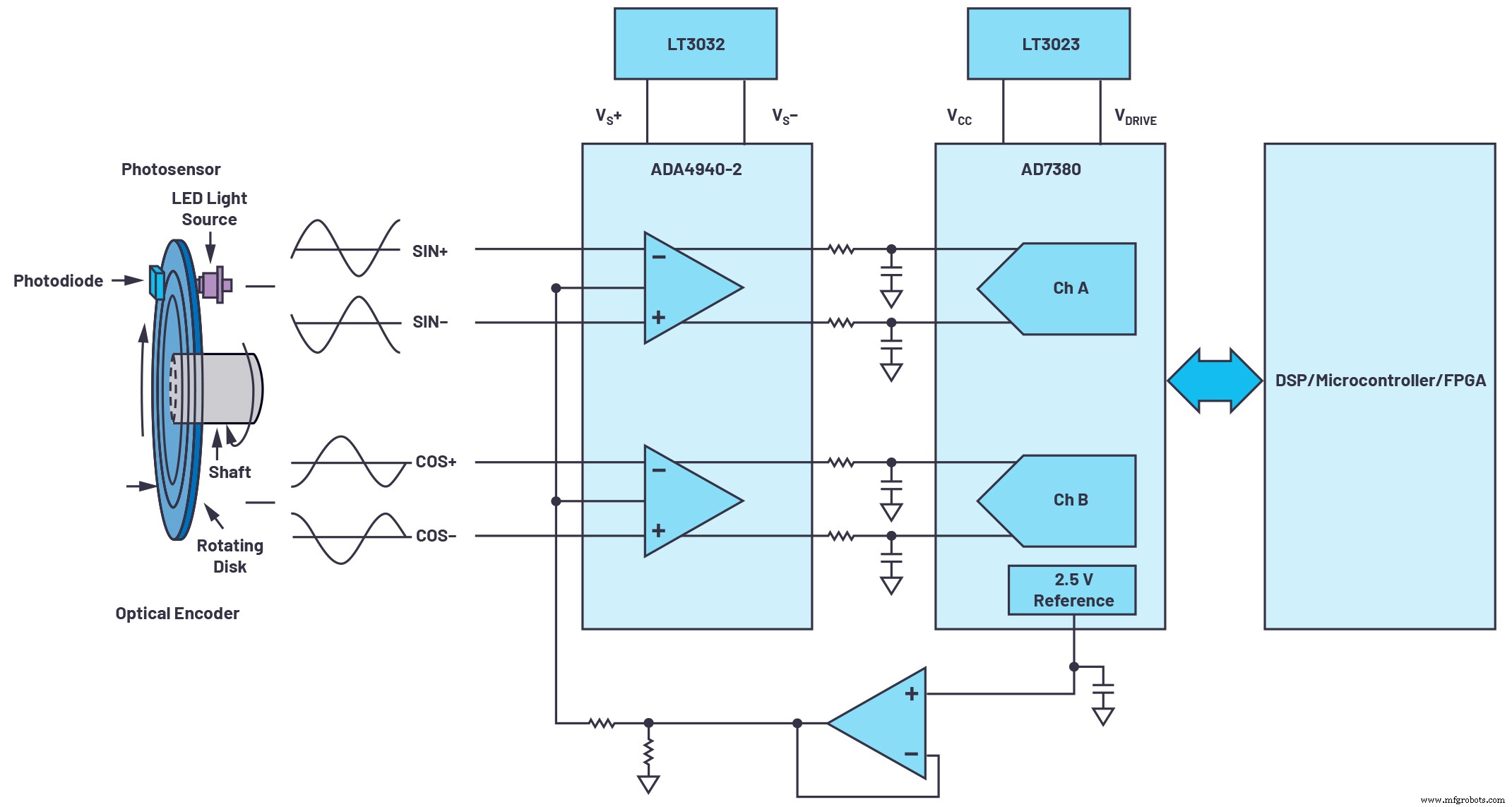
Figuur 4. Geoptimaliseerd ontwerp van feedbacksysteem. (Bron:Analog Devices, Inc.)
De on-chip 2,5 V-referentie zou minimale componentvereisten voor dit circuit mogelijk maken. De VCC en VDRIVE van de ADC en de voedingsrails van de versterkerdriver kunnen worden gevoed door een LDO-regelaar, zoals de LT3023 en LT3032. Wanneer deze referentieontwerpen worden gekoppeld, bijvoorbeeld met een optische encoder met 1024 slots die 1024 cycli van sinus en cosinus produceert in één omwenteling van de encoderschijf, bemonstert de 16-bits AD7380 elk encoderslot met 216 codes, waardoor de encoder in totaal toeneemt resolutie tot 26 bits.
De doorvoersnelheid van 4 MSPS zorgt ervoor dat gedetailleerde sinus- en cosinuscycli worden vastgelegd en de encoderposities up-to-date zijn. De hoge doorvoersnelheid maakt oversampling op de chip mogelijk, wat de tijdstraf vermindert van digitale ASIC's of microcontrollers die de precieze encoderpositie naar de motor sturen. On-chip oversampling zorgt voor een extra 2 bits resolutie, die kan worden gebruikt met een on-chip resolutie boost-functie. De resolutieverhoging kan de nauwkeurigheid verder verbeteren tot 28 bits.
De eisen van motorbesturingssystemen voor hogere nauwkeurigheid, hogere snelheid en miniaturisatie nemen toe. Optische encoders worden gebruikt als motorpositiesensoren. Om dit te doen, moet de signaalketen van de optische encoder een hoge mate van nauwkeurigheid hebben bij het meten van de motorpositie. Een ADC met hoge snelheid en hoge doorvoer legt nauwkeurig informatie vast en voert motorpositiegegevens naar de controller, waardoor hogere niveaus van nauwkeurigheid en optimalisatie in het positiefeedbacksysteem mogelijk zijn.
Over de auteur
Sensor
- Geminiaturiseerde, draadloze zuurstofsensor voor zieke baby's
- Slimme lichtregelingen voor kassen Lagere kosten
- Ontstekingstechnologie voor elektrische voortstuwingsapparatuur
- Aandrijvingssysteem voor hypersonische vlucht
- Slimme oplossingen ontwerpen voor gasstroomapparatuur
- Kalibratiesysteem voor geautomatiseerde plaatsing van vezels
- Vraag en antwoord:Lithium-ionbatterijen optimaliseren voor extreem snel opladen
- Geavanceerde IR Optical Assemblies voor UAV's ontwerpen
- Chemisch detectiesysteem voor lage concentratieniveaus
- 3D-bewegingsvolgsysteem voor autonome technologie
- Aansluitingen voor besturing:communicatie-interfaces voor positie- en bewegingssensoren