


Hall-effect magnetisch ontwerp:frontale en slide-by-configuraties
Meer informatie over hoe het Hall-effect wordt gebruikt in toepassingen voor positiedetectie.
Positiedetectie is een van de belangrijkste toepassingen van Hall-effectsensoren. Een Hall-effectapparaat neemt de sterkte van het aangelegde magnetische veld waar. Om de positie van een object te detecteren, kunnen we een kleine permanente magneet op het object bevestigen. Naarmate het object de magneet beweegt ten opzichte van het Hall-apparaat, verandert de sterkte van het magnetische veld. Deze wijzigingen kunnen door het systeem worden verwerkt om de objectpositie te detecteren.
Er zijn verschillende sensor-magneetconfiguraties die kunnen worden gebruikt in op Hall-effect gebaseerde toepassingen voor positiedetectie. Bij elke sensor-magneetconfiguratie wordt de magneet op een andere manier ten opzichte van de sensor bewogen. Dit beïnvloedt het magnetische veld dat door het Hall-apparaat wordt gedetecteerd en verandert de systeemkenmerken.
In dit artikel bekijken we enkele van de magnetische basisconfiguraties die worden gebruikt bij op Hall-effect gebaseerde positiewaarneming en bespreken we hun voor- en nadelen.
Head-On-configuratie
De eenvoudigste magnetische configuratie is de frontale detectie die wordt getoond in figuur 1.
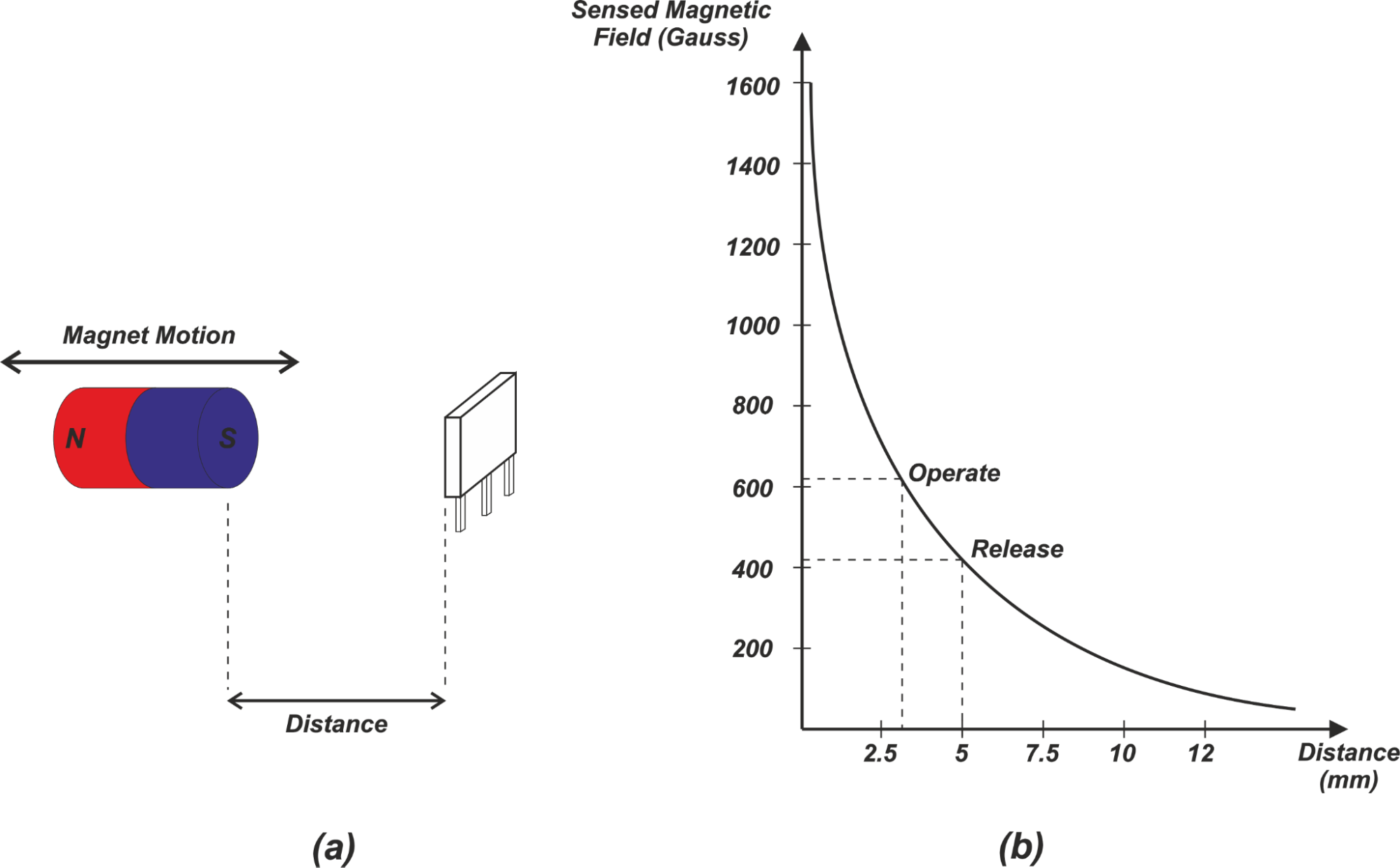
Figuur 1.
In dit geval wordt de zuidpool van de magneet direct naar of weg van de sensor bewogen. Wanneer de magneet zich zeer dicht bij de sensor bevindt, gaat een groter aantal magnetische fluxlijnen door het detectievlak van de sensor. Naarmate de zuidpool van de magneet echter van de sensor af beweegt, neemt de intensiteit van het magnetische veld snel af, zoals weergegeven in afbeelding 1(b).
Merk op dat de curve van Gauss versus afstand soms de fluxkaart van de constructie wordt genoemd. De magnetische fluxdichtheid van de frontale configuratie is omgekeerd evenredig met het kwadraat van de afstand tussen de magneet en de sensor. De fluxwaarden in figuur 1(b) kunnen worden geproduceerd door een magneet die ongeveer 30 mm lang is en een diameter heeft van ongeveer 6 mm.
Toepassing:de aanwezigheid van een object detecteren
De frontale configuratie kan worden gebruikt met een digitale (AAN/UIT) Hall-effectsensor om de aanwezigheid van een object te detecteren. Neem aan dat de magnetische bedienings- en vrijgavepunten van de sensor zijn zoals weergegeven in figuur 1 (b). Het magnetische werkpunt specificeert het niveau van een versterkend magnetisch veld waarop een Hall-apparaat inschakelt. Het magnetische vrijgavepunt komt overeen met het verzwakkende magnetische veld waarop het Hall-apparaat uitschakelt.
Naarmate de magneet de sensor nadert, wordt de intensiteit van het magnetische veld steeds groter. Op een afstand van ongeveer 3,1 mm is het waargenomen magnetische veld gelijk aan het magnetische werkpunt (ongeveer 620 Gauss in ons voorbeeld) dat de sensor inschakelt. Door de magneet dichter bij de sensor te brengen, ontstaat er een nog groter magnetisch veld en blijft de sensor AAN. Wanneer de sensor van de magneet af beweegt, neemt het magnetische veld af.
Zolang het magnetische veld echter niet kleiner is dan het releasepunt (ongeveer 420 Gauss in ons voorbeeld), blijft de sensor AAN. Pas als het magnetische veld onder het releasepunt zakt, wordt het apparaat uitgeschakeld. Op deze manier kunnen we de aanwezigheid van een object detecteren.
Beperkingen van frontale waarneming
Deze configuratie is minder nauwkeurig, vooral in termen van de afstand waardoor de sensor wordt uitgeschakeld. Dit komt door het feit dat de helling van de fluxkaart (de Gauss versus afstandscurve) kleiner is rond het releasepunt. Een gegeven variatie in de waarde van het magnetische lossingspunt kan leiden tot een relatief grote variatie in de waarde van de afstand waarop de sensor uitschakelt. Dezelfde variatie in het magnetische werkpunt leidt tot een kleinere afstandsvariatie. Dit wordt geïllustreerd in figuur 2.
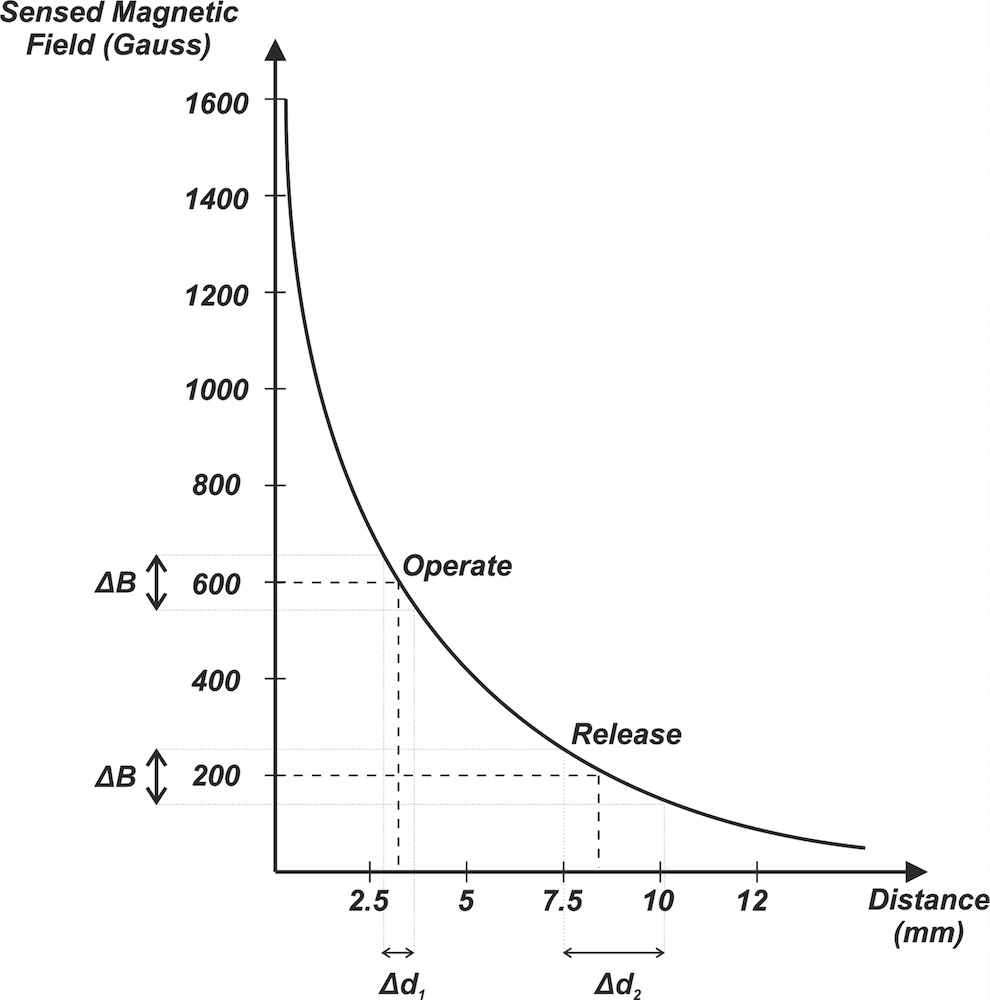
Figuur 2
Neem aan dat de eenheid-tot-eenheid variatie van de bedienings- en vrijgavepunten ΔB zijn voor een hypothetische sensor zoals weergegeven in figuur 2. Aangezien de curve een grotere helling heeft bij het magnetische werkpunt, is Δd1 is veel kleiner dan Δd2 . Daarom zal de afstand die overeenkomt met het magnetische werkpunt consistenter zijn tussen verschillende borden.
Een ander nadeel is dat frontale waarneming niet kan worden gebruikt voor het detecteren van grote verplaatsingsbereiken omdat de magnetische veldlijnen zeer snel afnemen. Bovendien is bij frontale configuratie de relatie tussen het gedetecteerde veld en de afstand niet-lineair. Dit maakt detectie van bewegingen met een lange slag een uitdaging wanneer lineaire positiemeting vereist is. Vanwege deze beperkingen wordt frontale detectie meestal gebruikt als naderingsdetector in toepassingen waar de nauwkeurigheidseisen niet erg veeleisend zijn.
Unipolaire Slide-By Sensing
In deze opstelling beweegt een enkele pool van de magneet zijwaarts langs het detectievlak van de sensor. Dit wordt getoond in figuur 3(a).
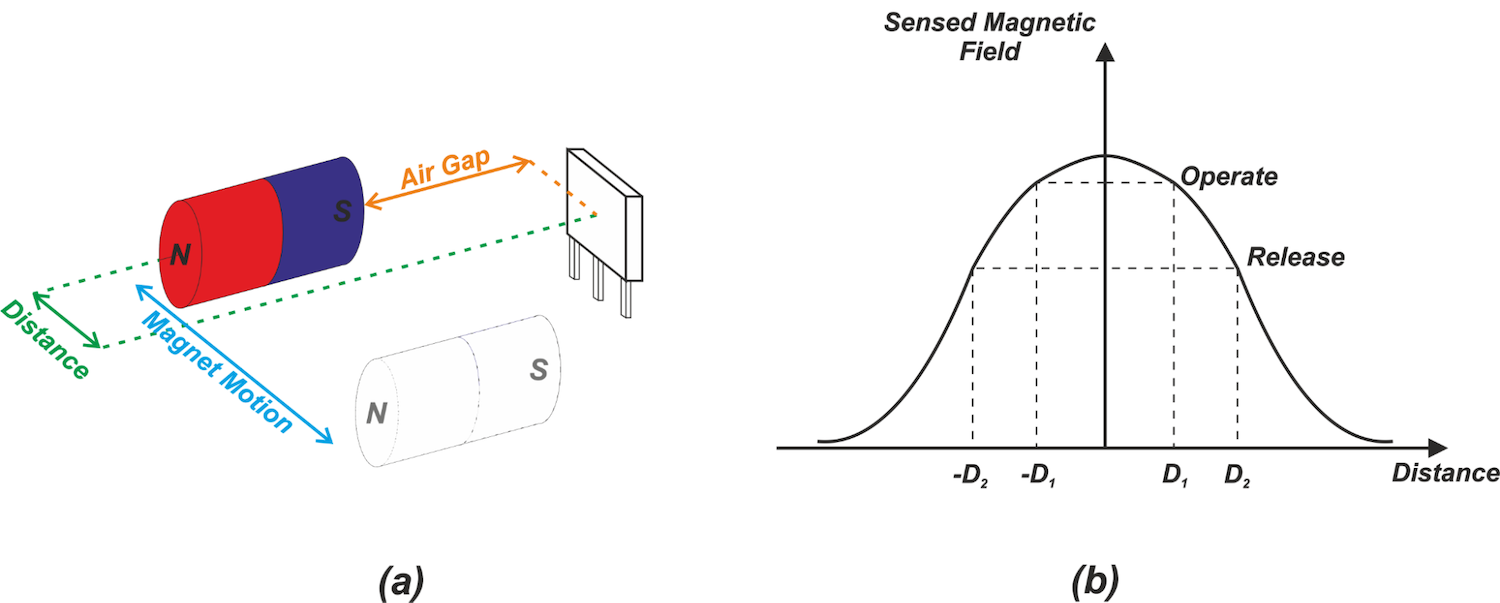
Figuur 3
De magneetpool bevindt zich op een constante loodrechte afstand (weergegeven door "luchtspleet" in de afbeelding) terwijl deze langs de sensor beweegt. In de middenpositie (afstand=0) is het waargenomen magnetische veld maximaal. Naarmate de magneet van de sensor af beweegt, neemt het magnetische veld af. Aangezien het door de magneet geproduceerde magnetische veld symmetrisch is, is de fluxkaart symmetrisch rond de oorsprong, zoals weergegeven in figuur 3(b).
De piekwaarde van de fluxkaart verandert met de "air gap"-waarde zoals weergegeven in figuur 4.
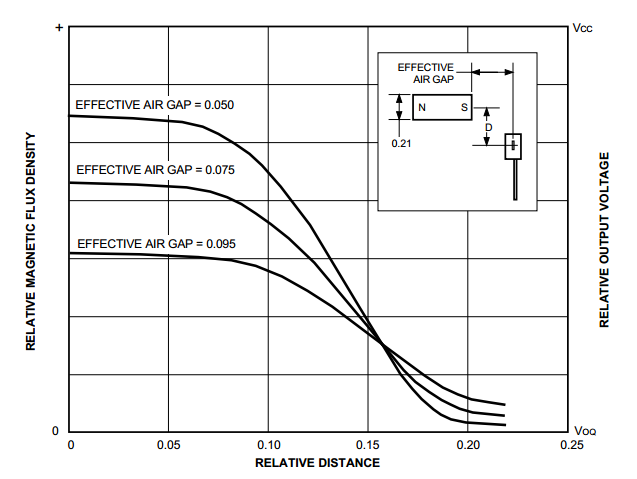
Figuur 4. Afbeelding met dank aan Allegro.
Head-On of Slide-By-configuratie?
Het is belangrijk op te merken dat de keuze van de magnetische configuratie afhangt van het type beweging dat wordt gedetecteerd. Elk systeem heeft mogelijk een andere reeks mechanische beperkingen en functies. Bij de frontale configuratie kan het object bijvoorbeeld niet voorbij de sensor komen. Deze opstelling is geschikt voor toepassingen waarbij het object dat wordt gedetecteerd een duidelijke eindpositie heeft en we geïnteresseerd zijn in het detecteren van de aanwezigheid/afwezigheid van het object op dit eindpunt.
Head-on sensing kan bijvoorbeeld een goede keuze zijn om te detecteren of het deksel van een smartphone-cover open of gesloten is. De slide-by-detectie heeft deze beperking niet; het kan worden gebruikt, ongeacht of het object langs de sensor beweegt of niet.
Een interessant kenmerk van de slide-by-configuratie is de symmetrie ervan. Aangezien de curve van Gauss versus afstand van deze structuur symmetrisch is rond de oorsprong, zijn de bedienings- en vrijgavepunten niet afhankelijk van of we naar of van de sensor af bewegen. Dit kan handig zijn bij het detecteren van een afwijking van een middellijn.
Merk op dat er andere slide-by-configuraties zijn waarvan sommige geen symmetrische respons bieden. In het volgende artikel zullen we kijken naar meer geavanceerde magnetische configuraties die vaak worden gebruikt in toepassingen voor het detecteren van Hall-effectposities.
Ga naar deze pagina om een volledige lijst van mijn artikelen te zien.
Sensor
- Bloeddruksensor – werkt en zijn toepassingen
- Werking van de spanningssensor en zijn toepassingen
- RVG-sensor – werkingsprincipe en zijn toepassingen
- Lambdasensor – werking en toepassingen
- Beeldsensorwerking en zijn toepassingen
- Kleursensor – Werking en toepassingen
- Arduino-sensor – Typen en toepassingen
- Kompassensor – Werking en toepassingen
- ACS712-stroomsensorwerking en toepassingen
- Gyroscoopsensor werkt en zijn toepassingen
- Hall-effectsensor begrijpen