


Hall-effectpositiedetectie:responslineariteit en helling voor slide-by-configuraties
Ontdek hoe verschillende beslissingen met betrekking tot oplossingen voor Hall-effectdetectie, met name voor slide-by-configuraties, uw ontwerpen kunnen beïnvloeden.
Hall-effectsensoren maken efficiënte oplossingen voor positiedetectie mogelijk. Met Hall-sensoren is er geen mechanische verbinding tussen de sensor en het bewegende deel, waardoor een hogere betrouwbaarheid en duurzaamheid kan worden bereikt.
Er zijn verschillende magneetsensorconfiguraties die kunnen worden gebruikt in op Hall-effect gebaseerde toepassingen voor positiedetectie. In dit artikel zullen we kijken naar een slide-by magnetische configuratie die een lineaire Gauss versus afstandscurve kan produceren. We zullen ook zien dat het mogelijk is om een combinatie van magneten te gebruiken om de helling van de Gauss versus afstandscurve aan te passen.
Lineariteit kan een beslissingsfactor zijn
In een vorig artikel hebben we de eenvoudige frontale en slide-by-configuraties onderzocht. Deze twee arrangementen worden getoond in figuur 1.
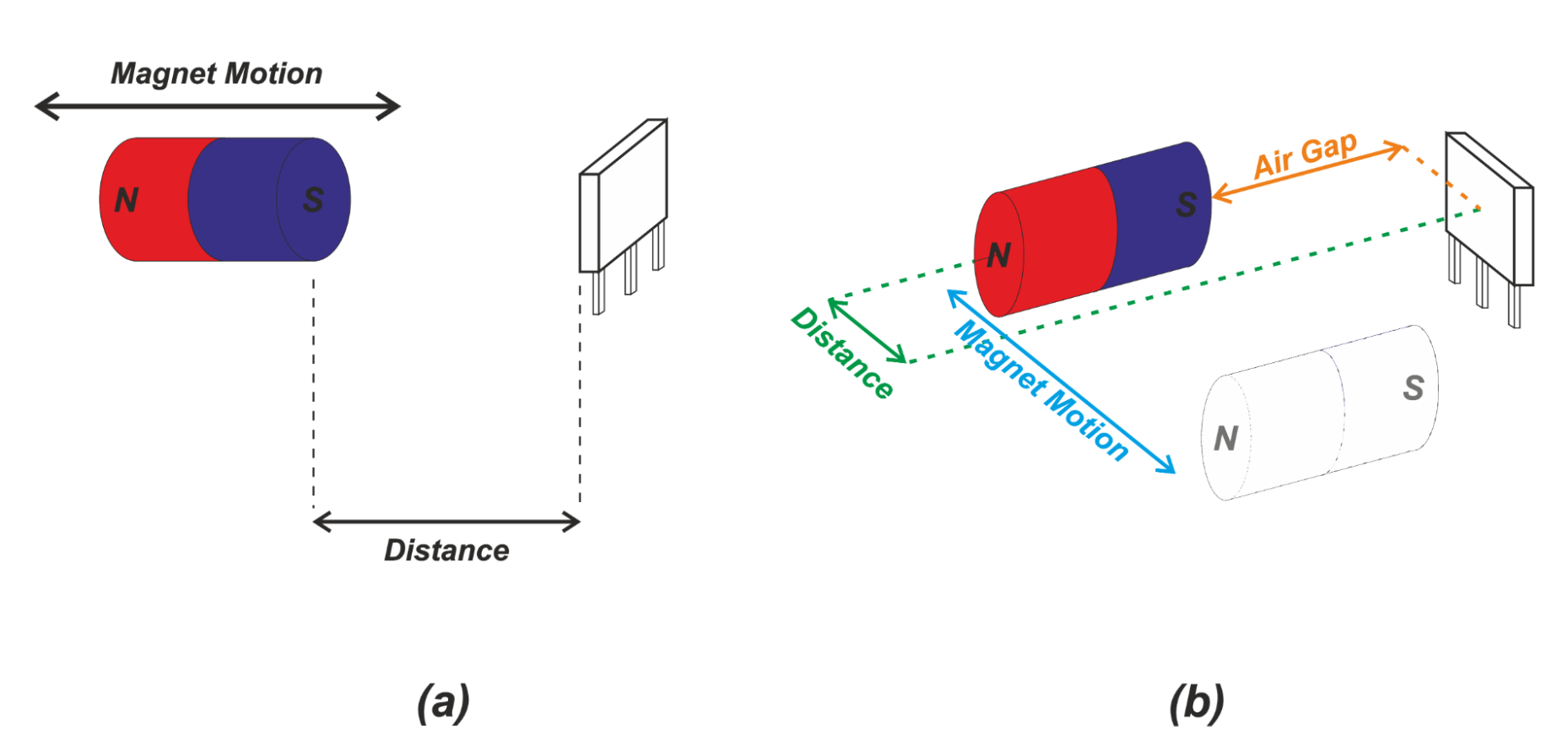
Afbeelding 1 (a). Direct en (b) slide-by detectie.
We zagen dat de relatie tussen het gedetecteerde veld en de afstand niet-lineair is met de bovenstaande regelingen. Deze magneetsensorconfiguraties worden meestal gebruikt als naderingsdetectoren in toepassingen waar de nauwkeurigheidseisen niet erg veeleisend zijn.
Wanneer echter nauwkeurige controle van de positie langs de detectieslag vereist is, geven we de voorkeur aan een lineaire relatie tussen de sensoruitgang en verplaatsing. Hoewel we software kunnen gebruiken om de lineariteitsfouten van de sensor te verwijderen, is een lineaire respons wenselijk omdat dit de meetnauwkeurigheid verhoogt en de systeemkalibratie vergemakkelijkt.
Lineaire slide-by-detectie
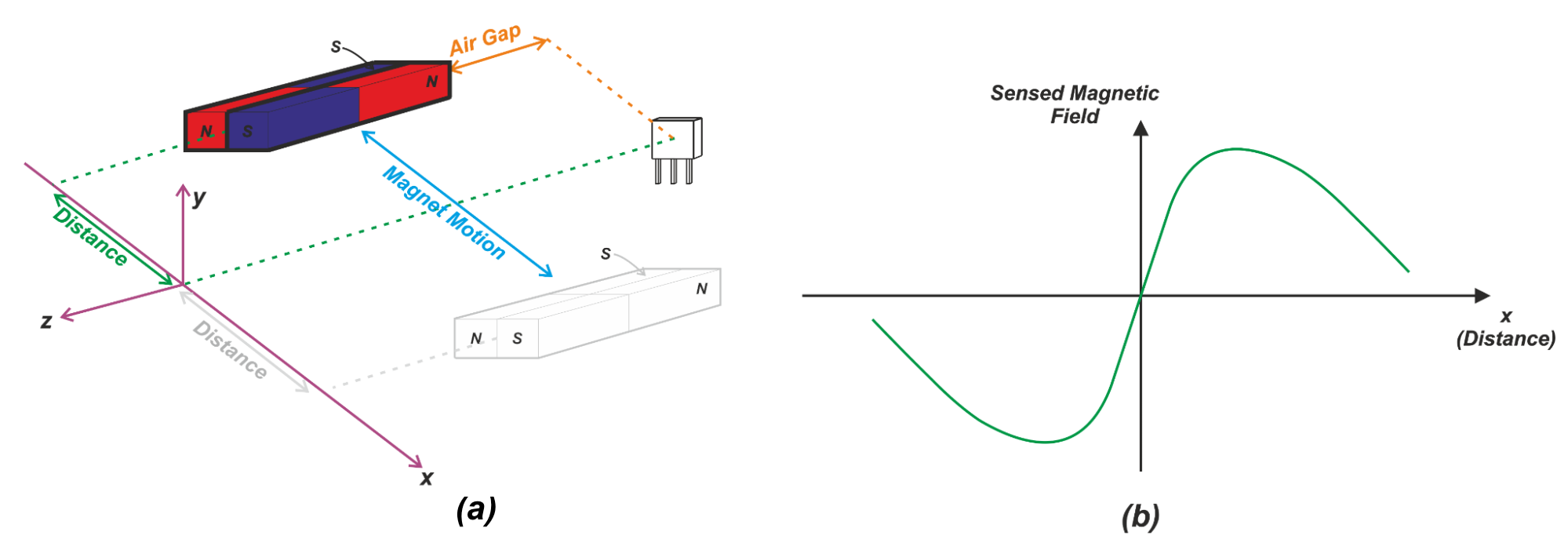
Figuur 2(a) toont een slide-by-opstelling die een lineair verband vertoont tussen de z-component van het gedetecteerde magnetische veld en de verplaatsing van de magneet. Figuur 2(b) toont de magnetische fluxdichtheid (in de richting van de z-as) versus magneetbeweging.
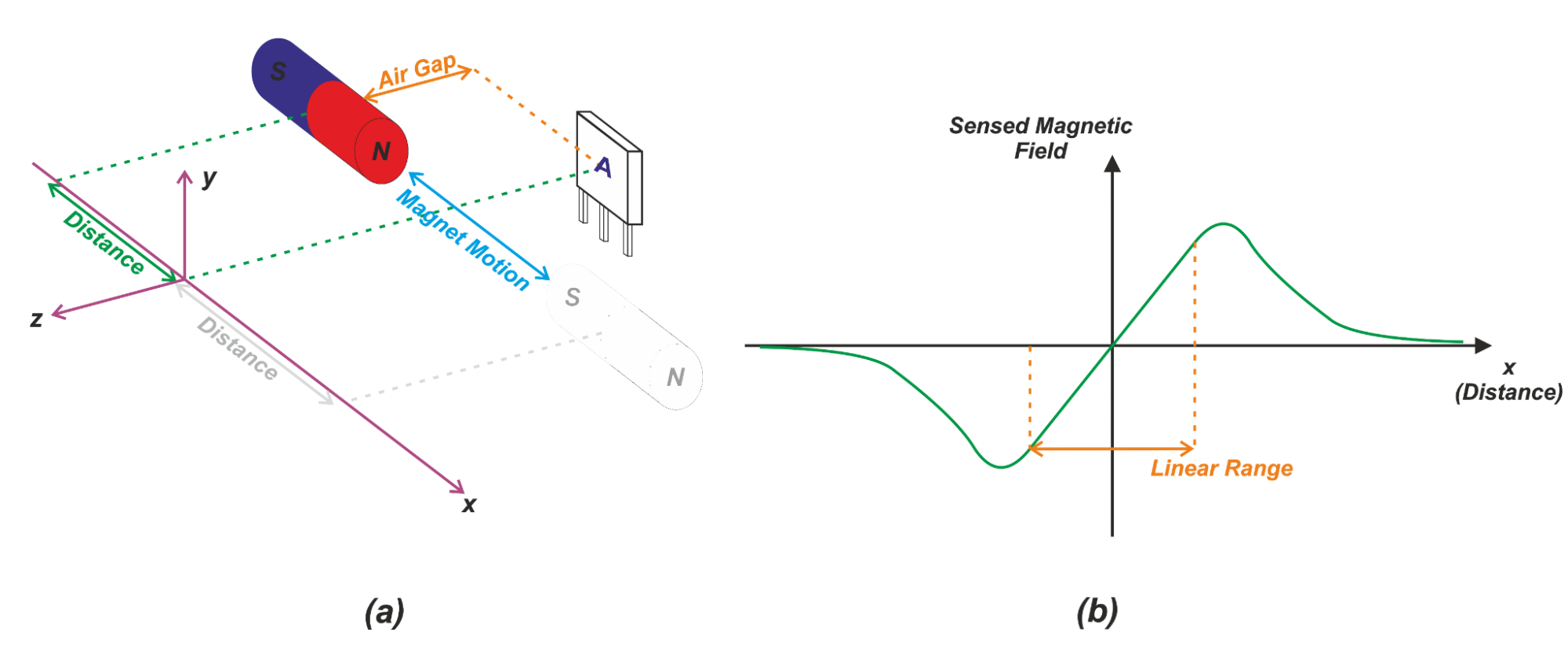
Afbeelding 2 (a). Een slide-by-configuratie met lineaire respons (b) magnetische fluxdichtheid versus magneetpositie
Wanneer de magneet zich aan de linkerkant van de sensor bevindt (x<0), produceren de magnetische veldlijnen van de magneet een component in de tegenovergestelde richting van de z-as. Merk op dat de veldlijnen van de noordpool naar de zuidpool van de magneet gaan.
Afbeelding 3 toont een van de veldlijnen die door de sensor gaan.
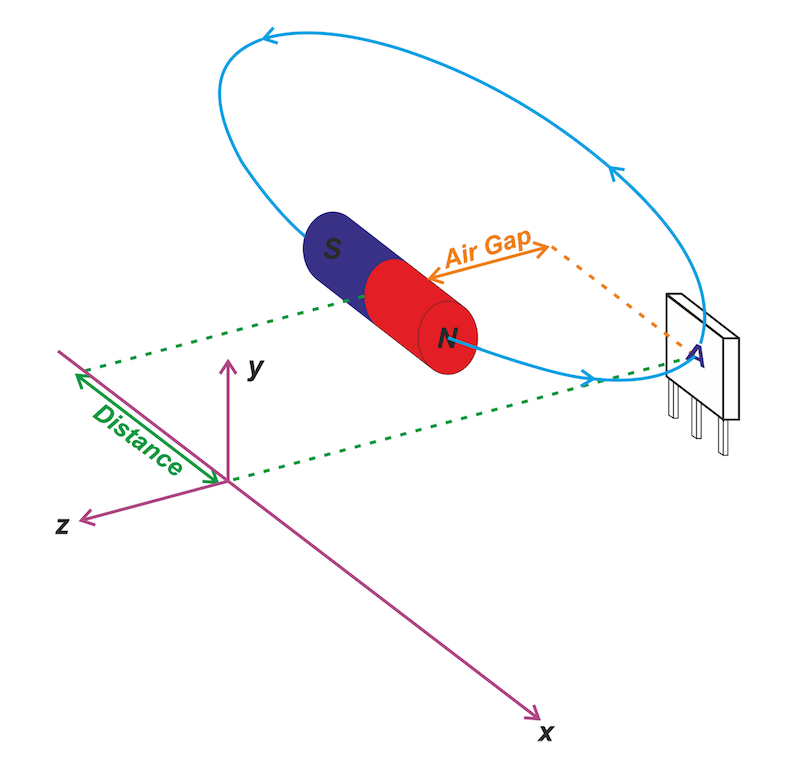
Figuur 3. Richting van magnetische veldlijnen door een Hall-effectsensor
Daarom is voor x<0 de z-component van het gedetecteerde magnetische veld negatief. Wanneer de magneet de middenpositie bereikt, is het veld in de z-richting nul. Voor een positieve verplaatsing (x>0) zal het magnetische veld een component produceren in de z-asrichting (positief magnetisch veld). Voor grote verplaatsingen in beide richtingen kan een kleiner aantal veldlijnen door de sensor gaan. Daarom neemt het magnetische veld dat door de sensor wordt waargenomen af.
Een van de belangrijkste kenmerken van deze opstelling is dat de z-component van het magnetische veld een lineaire relatie vertoont met verplaatsing rond de oorsprong. Dit lineaire bereik wordt getoond in figuur 2(b). De lengte van het lineaire gebied is iets minder dan de lengte van de magneet. Met een magneet van 22 mm kan het lineaire gebied zich bijvoorbeeld uitstrekken van ongeveer -10 mm tot +10 mm. Dit lineaire gedrag stelt ons in staat om de positie van een bewegend object gemakkelijker en nauwkeuriger te detecteren.
Wat als we een groter lineair bereik nodig hebben?
We kunnen een langere magneet gebruiken om het lineaire bereik van de bovenstaande configuratie te vergroten; bepaalde toepassingen kunnen echter geen grote magneet in het systeem opnemen. Ook bij lange magneten kunnen de kosten een beperkende factor zijn. Als een slag langer dan de magneetlengte moet worden gedetecteerd, kunnen we een reeks sensoren gebruiken om het meetbereik te vergroten. Dit wordt getoond in figuur 4.
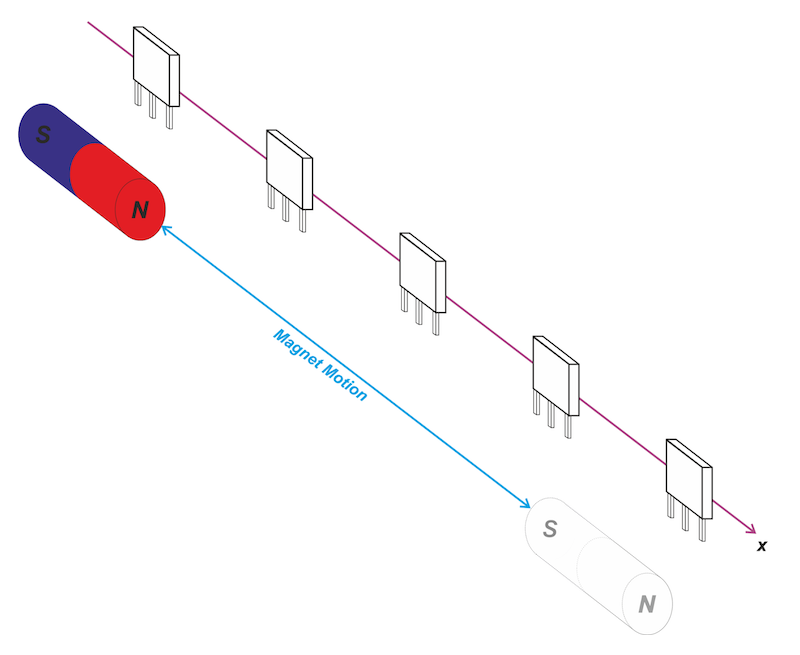
Figuur 4. Meerdere Hall-effectsensoren gebruiken voor een groter lineair bereik
In dit geval moeten we de gegevens van meer dan één sensor verwerken om de objectpositie te vinden. Raadpleeg deze TI-aanvraagnota voor meer details.
De aanwezigheid van een object detecteren
De doorschuifconfiguratie in figuur 2 kan ook worden gebruikt voor het detecteren van de aanwezigheid van een object (in plaats van het bepalen van de objectpositie over zijn slag). Neem aan dat in het voorbeeld weergegeven in figuur 2(a), de magneet evenwijdig aan de x-as van links naar rechts beweegt. Stel dat de magnetische bedienings- en vrijgavepunten van onze digitale (AAN/UIT) Hall-effectsensor zijn zoals weergegeven in figuur 5.
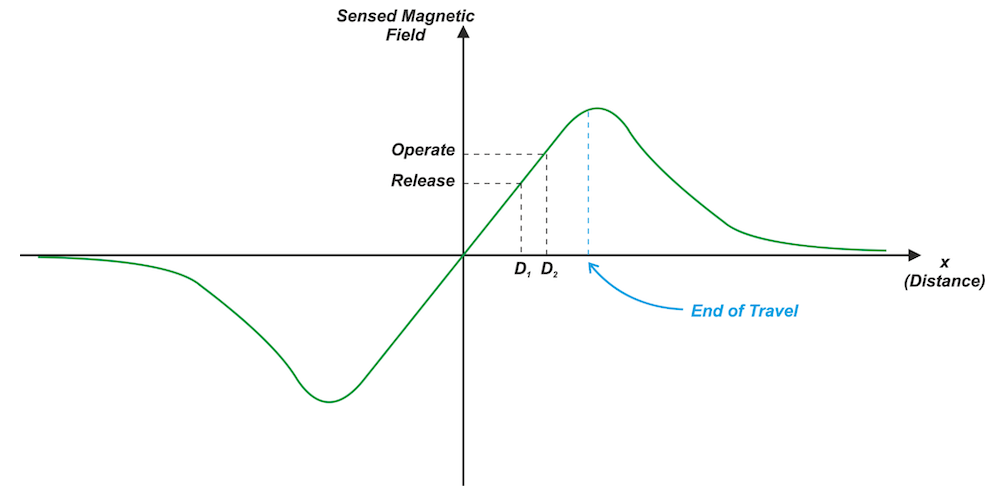
Figuur 5. Een slide-by-configuratie gebruiken voor AAN/UIT-detectie
Naarmate de magneet de sensor van links naar rechts nadert, wordt de intensiteit van het magnetische veld steeds groter. Bij D2 is het gedetecteerde magnetische veld gelijk aan het magnetische werkpunt dat de sensor AAN zet. Door de magneet dichter bij de sensor te brengen, ontstaat er een nog groter magnetisch veld en blijft de sensor AAN.
Als we de sensor nu in de tegenovergestelde richting (van rechts naar links) bewegen, neemt het magnetische veld af. Bij D1 wordt het magnetische veld kleiner dan het vrijgavepunt waardoor de sensor UIT wordt gezet. Hierdoor kunnen we de aanwezigheid van het object detecteren. We kunnen deze structuur ook gebruiken om een referentiepunt (het schakelpunt van de sensor) in de objectslag te definiëren.
Volgens de magnetische fluxdichtheid versus afstandscurve in figuur 5, kan een gegeven magnetische fluxdichtheid worden geproduceerd door twee verschillende verplaatsingen. Dat is de reden waarom de bovenstaande opstelling meestal wordt gebruikt in toepassingen waar de mechanische structuur het einde van de reis van het object beperkt op een manier dat de sensorwisseling alleen kan plaatsvinden bij één bepaalde verplaatsing. Dit voorkomt onduidelijkheden bij de interpretatie van de resultaten.
Het verloop van de Gauss versus afstandscurve vergroten
We hebben hierboven besproken dat een digitale (AAN/UIT) Hall-effectsensor kan worden gebruikt met de slide-by-configuratie om een referentiepunt in de objectslag te definiëren. Als we de helling van de curve van Gauss versus afstand zouden kunnen vergroten, zouden we het referentiepunt nauwkeuriger kunnen detecteren.
Bij een grotere helling leidt een gegeven verplaatsing tot een grotere verandering in de magnetische veldintensiteit die gemakkelijker door de sensor kan worden gedetecteerd. Figuur 6(a) toont een magnetisch systeem met een helling die groter is dan die van de configuratie in figuur 2(a).
Figuur 6. Meerdere magneten gebruiken om de resolutie van de veldsterkte te vergroten
In dit geval worden de noord- en zuidpool van een paar magneten verplaatst ten opzichte van de sensor. Het totale veld wordt bepaald door de veldlijnen van beide magneten. In deze opstelling wordt de afstand gemeten ten opzichte van het midden van het magneetpaar. Figuur 6(b) toont de z-component van het gedetecteerde magnetische veld versus de afstand. Op de middenpositie (x=0) is het aantal veldlijnen vanaf de noordpool van de ene magneet dat door de sensor gaat gelijk aan het aantal veldlijnen vanaf de zuidpool van de andere magneet. Daarom is de netto magnetische fluxdichtheid nul.
Stel dat we de magneet vanuit de middenpositie naar rechts verplaatsen (x>0). Dit verhoogt abrupt het aantal veldlijnen vanaf de zuidpool en creëert een magnetisch veld met een positieve z-component. Evenzo, als we de magneet naar links verplaatsen vanuit de middenpositie (x<0), verkrijgen we een relatief sterk magnetisch veld met een negatieve z-component. Rond de oorsprong is de gradiënt van de curve hoger dan die van de slide-by-configuratie in figuur 2(a) omdat de overgang van de noord- naar de zuidpool abrupt plaatsvindt. Deze relatief grotere helling van de curve van Gauss versus afstand kan ons helpen de referentiepositie van een bewegend object nauwkeuriger te definiëren.
Er zijn nog twee andere interessante varianten van deze slide-by-configuratie. Een versie scheidt de twee magneten door een kleine vaste afstand. Dit stelt ons in staat om een minder abrupte overgang van de noord- naar de zuidpool te hebben en dus de helling van de respons rond de oorsprong aan te passen. Een andere versie gebruikt een combinatie van drie magneten. Dit kan een symmetrische respons creëren met grote hellingen in beide richtingen. Een symmetrische respons kan handig zijn bij het detecteren van een afwijking van een middellijn. Raadpleeg voor meer informatie over deze twee configuraties de handleiding "Hall Effect Sensing and Applications" van Honeywell.
Ga naar deze pagina om een volledige lijst van mijn artikelen te zien.
Sensor
- Gasklepstandsensor – Werkingsprincipe en toepassingen
- Werking en toepassingen van de Hall-effectsensor.
- Future Electronics:platform voor snelle ontwikkeling voor thermische beeldvorming en IR-detectie
- ADI:impedantie &potentiostaat AFE voor biologische en chemische detectie
- Infineon lanceert monolithisch geïntegreerde lineaire Hall-sensor voor ASIL D-systemen
- Ambarella, Lumentum en ON Semiconductor werken samen aan op AI-verwerking gebaseerde 3D-detectie voor next-gen AIoT-apparaten
- Soft Sensing, zelfherstellende materialen voor robothanden en -armen
- Executive Roundtable:Sensing en IIoT
- Grafeen-gebaseerde fotonica-apparaten voor teledetectie
- Aansluitingen voor besturing:communicatie-interfaces voor positie- en bewegingssensoren
- Magnetische velden detecteren