


ROS2 + DDS-integratie:wanneer ecosystemen samensmelten | RTI

Zoals aangekondigd in juli 2018, is de tweede release van ROS2 - genaamd "Bouncy Bolson" - kan nu worden gedownload van de ROS2-website voor Intel Linux-, Windows- en iOS-platforms.
Als dit u onbekend in de oren klinkt, is ROS (Robot Operating System) een open-source framework en toolsuite voor het bouwen van robotsystemen, en het komt in twee primaire smaken:ROS - het origineel research-versie met Python en XML, en ROS2 – een prestatieverbeterde versie die DDS als connectiviteitsraamwerk gebruikt.
Over ROS2 Bouncy Bolson
De 'Bouncy'-release is speciaal omdat het RTI Connext DDS bevat in de binaire distributie onder een niet-commerciële licentie. Professionele DDS is nu een gratis optie voor onderzoekers, beoordelaars en academici die ROS2 gebruiken voor robotica-toepassingen.
Dit betekent dat het ecosysteem van DDS-tools en -diensten beschikbaar is voor alle ROS2-gebruikers, dankzij de op standaarden gebaseerde interoperabiliteit die inherent is aan DDS, waaronder:
- RTI Admin Console:de beste tool voor het diagnosticeren van problemen met systeemconnectiviteit.
- RTI System Monitor:de beste tool voor het afstemmen en optimaliseren van systeemprestaties.
- RTI-opnameservice: hoge bandbreedte, langdurige opname en weergave van onderwerpgegevens van uw systeem.
- RTI Routing Service: een kant-en-klare oplossing die fungeert als een architecturale brug/gateway.
Laten we eens kijken hoe de RTI Admin Console het diagnosticeren en begrijpen van ROS2-connectiviteitsproblemen een fluitje van een cent kan maken. Ik heb onlangs een LiDAR-gegevensbron voor ROS2 samengesteld en mijn eerste poging om de gegevens weer te geven met RViz resulteerde in:geen gegevens. De terminal voor RViz produceerde niet veel nuttige berichten:

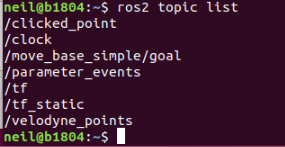 Ik ben geïnteresseerd in het onderwerp "/velodyne_points":
Ik ben geïnteresseerd in het onderwerp "/velodyne_points": Produceert de uitgever van "/velodyne_points" gegevens?:
Produceert de uitgever van "/velodyne_points" gegevens?: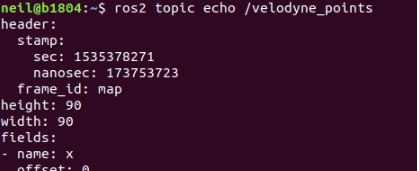 Ja . . . dus waarom worden de gegevens niet weergegeven door RViz?
Ja . . . dus waarom worden de gegevens niet weergegeven door RViz? Beheerdersconsole
Laten we proberen dit probleem te diagnosticeren met behulp van de RTI Admin Console, die handig beschikbaar is in de RTI Launcher:

Vanaf het moment dat de Admin Console wordt gelanceerd, laat het me weten dat er een probleem is onder de deelnemers aan het DDS-netwerk (let op de rode X-box-indicator):
 "Domein 0" uitbreiden en mijn interessegebied benadrukken (/velodyne_points) toont onmiddellijk de oorzaak van het probleem - een QoS-mismatch:
"Domein 0" uitbreiden en mijn interessegebied benadrukken (/velodyne_points) toont onmiddellijk de oorzaak van het probleem - een QoS-mismatch: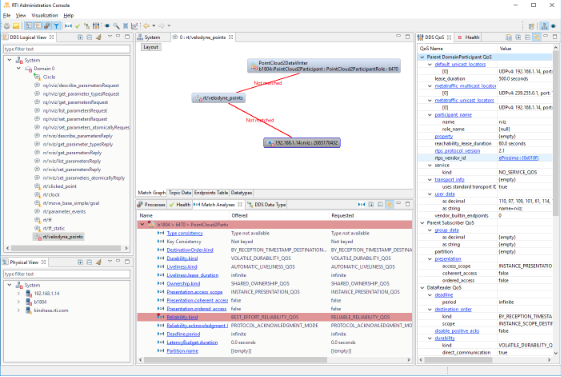 Mijn uitgever biedt "Best Effort"-betrouwbaarheid, maar de RViz-abonnee vereist een “betrouwbare” verbinding. In plaats van toe te staan dat deze mismatch voortduurt, weigert DDS de verbinding en voorkomt dat de mismatch onopgemerkt blijft.
Mijn uitgever biedt "Best Effort"-betrouwbaarheid, maar de RViz-abonnee vereist een “betrouwbare” verbinding. In plaats van toe te staan dat deze mismatch voortduurt, weigert DDS de verbinding en voorkomt dat de mismatch onopgemerkt blijft.Deze QoS-mismatch werd onmiddellijk onthuld door de beheerdersconsole, samen met de details van elke andere deelnemer aan dit ROS2 DDS-netwerk, inclusief alle normaal verborgen interne onderwerpen van ROS2. In één oogopslag kan ik vaststellen dat:
- Er zijn enkele vermeldingen in het foutenlogboek - we zullen die later bekijken.
- Er zijn een aantal "Alleen-Writer"- en "Alleen-Lezer"-onderwerpen. Dit zijn onderwerpen die een onderwerp kunnen publiceren of erop kunnen worden geabonneerd, maar die op dit moment geen aanvullende abonnee of uitgever hebben.
- Dit systeem gebruikt een mix van RMW-lagen van verschillende DDS-leveranciers. Dit is geen probleem. DDS is ontworpen voor interoperabiliteit van meerdere leveranciers.
- Als u werkt met de Connext RMW-laag, wordt typecode-informatie opgenomen in het DDS-detectieverkeer en kan deze eenvoudig worden bekeken in de beheerdersconsole:
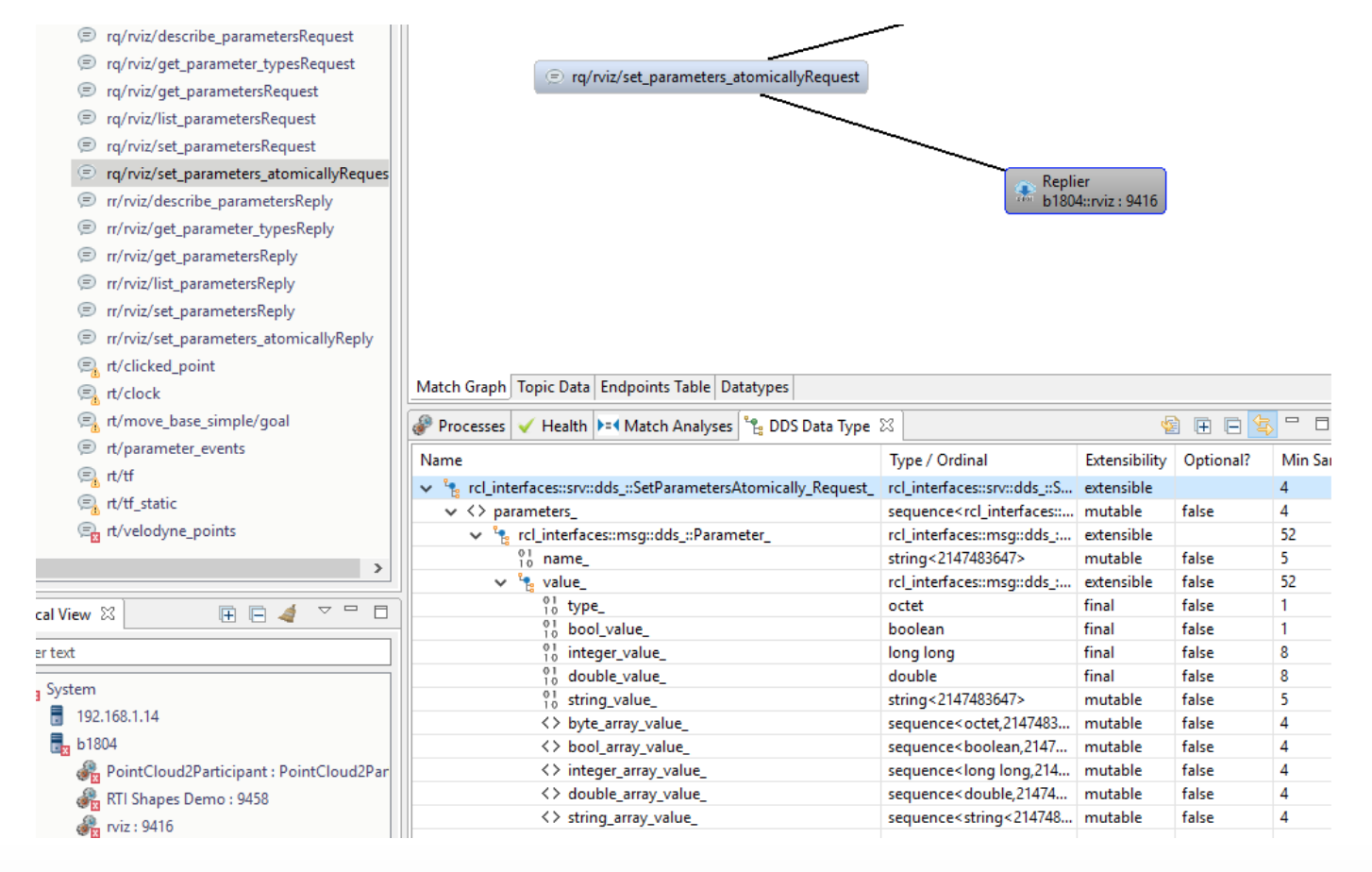
Bij gebruik van andere RMW-lagen wordt deze informatie onderdrukt.
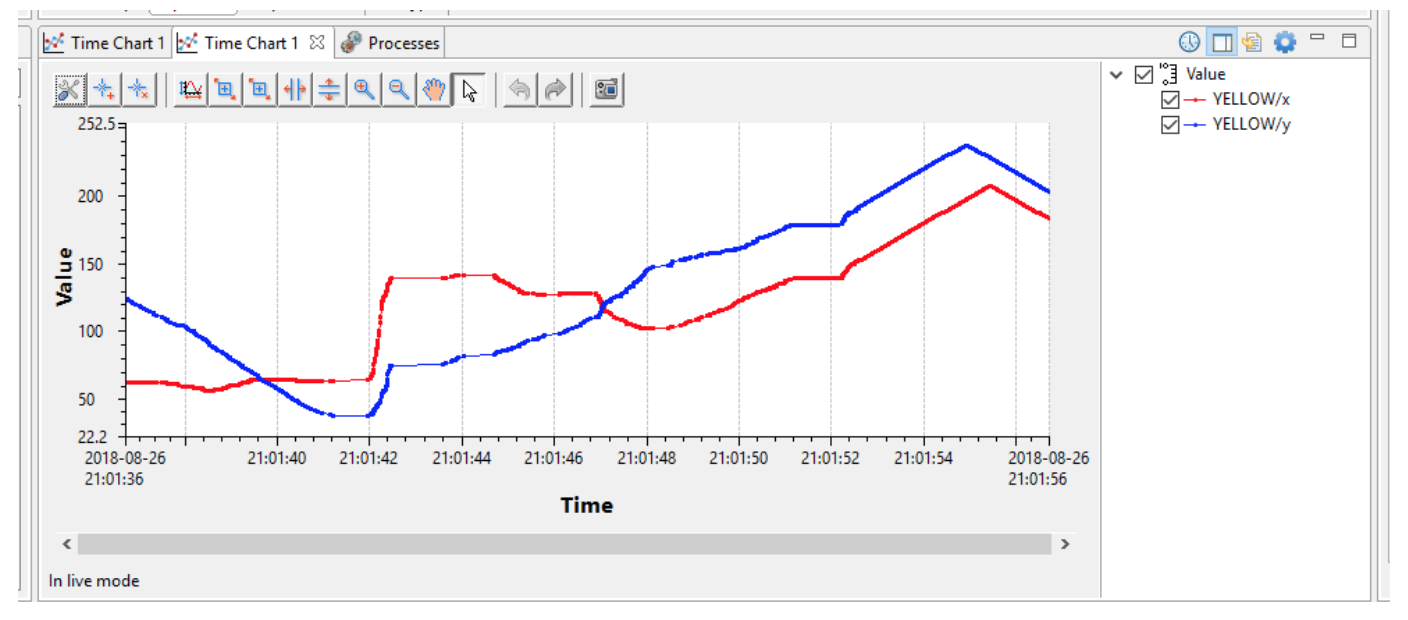
Beheerdersconsole kan zich ook abonneren op gegevensonderwerpen en hun gegevenswaarden afdrukken of visualiseren:
Met de hulp van de Admin Console kon ik de QoS-mismatch identificeren die de gegevensoverdracht verhinderde en het systeem binnen een paar minuten aan de praat krijgen.
Lees meer blogposts die de kracht van het gecombineerde ROS2/DDS-ecosysteem benadrukken - om een ROS/ROS2-systeem uit te breiden, te diagnosticeren en te optimaliseren, en om verbeterde 3D-visualisatie te bieden aan pure DDS-systemen .
ROS2 + DDS:A Field Guide to Interoperability
ROS2 + DDS Speel het nog een keer
ROS 2 en DDS:interoperabiliteit stimuleert de volgende generatie robotica
Internet of Things-technologie
- Open DDS versus RTI DDS-software
- Software testen bij RTI
- Connex 6:Nu beschikbaar!
- ROS2 + DDS:speel het opnieuw
- ROS2 + DDS:een veldgids voor interoperabiliteit
- Aankondiging van de nieuwste RTI Perftest voor Connext DDS
- Hoe Qt en DDS te integreren in een IoT-toepassing
- AUTOSAR Adaptive Platform 18.03:Nu met DDS!
- Dit is waarom iedereen RTI Connext DDS gebruikt voor autonome voertuigen
- Introductie van RTI Labs en Connector voor Connext DDS met Python
- 5G-integratie in IIoT-systemen versnellen de adoptie van Industry 4.0