


Sneller en verder gaan met Fieldbus
Industrie-experts, zoals PROCENTEC, laten een gestage groei zien in de acceptatie van op RS-485 gebaseerde veldbustechnologie (PROFIBUS ® ) en snelle groei voor Industrial Ethernet (PROFINET). In 2018 waren er wereldwijd 61 miljoen PROFIBUS-veldbusnodes geïnstalleerd, waarbij PROFIBUS-procesautomatisering (PA) jaar op jaar met 7% groeide. De PROFINET-installatiebasis bedraagt 26 miljoen nodes, met alleen al in 2018 5,1 miljoen apparaten. 1
Met deze gestage groei in de acceptatie van RS-485-veldbus en het versnellen van de implementatie van slimme verbonden fabrieken door Industrie 4.0, helpt het ervoor zorgen dat veldbustechnologieën worden geoptimaliseerd om een slim systeem mogelijk te maken. Geoptimaliseerde veldbustechnologieën moeten een zorgvuldige balans vinden tussen EMC-robuustheid en betrouwbare datatransmissie.
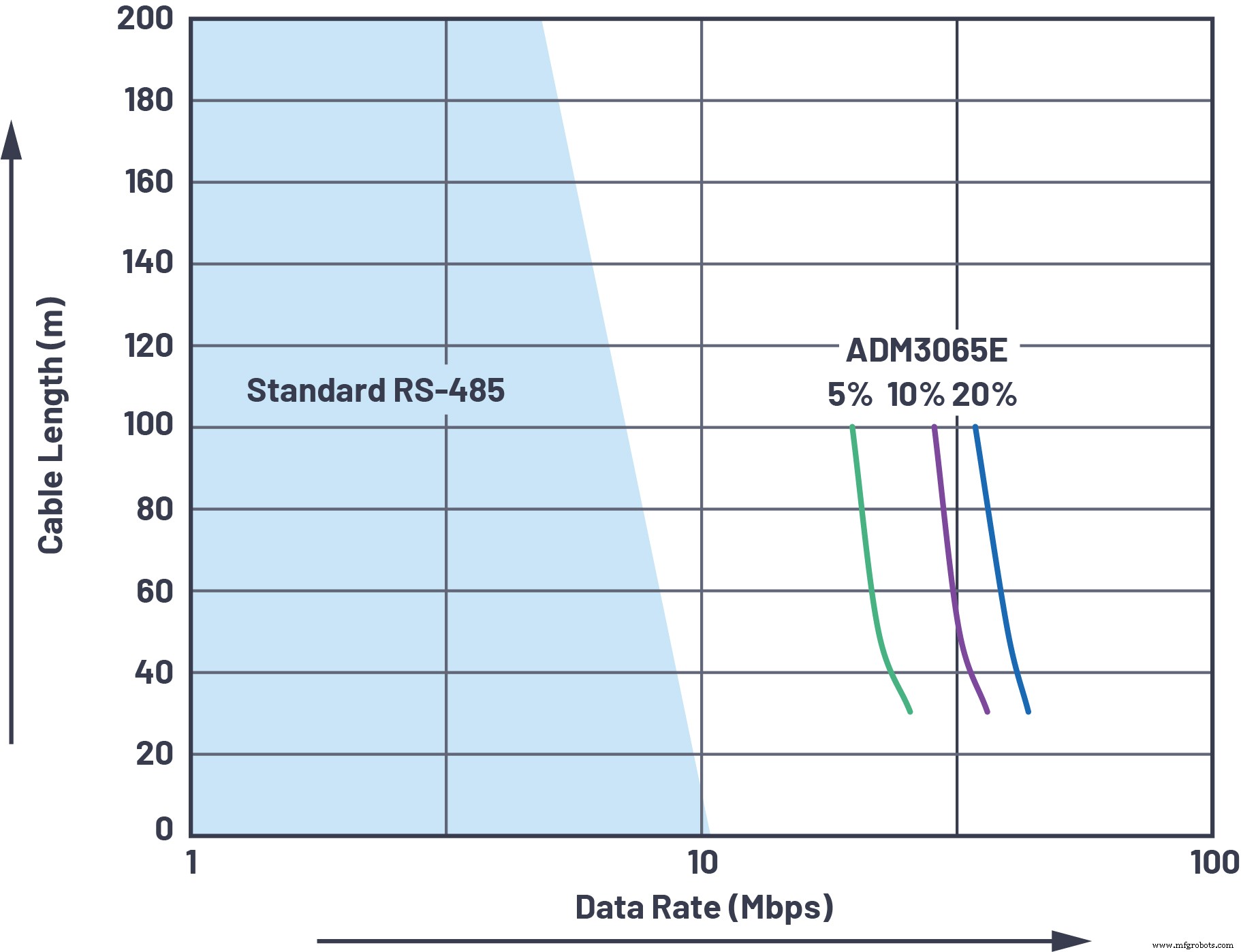
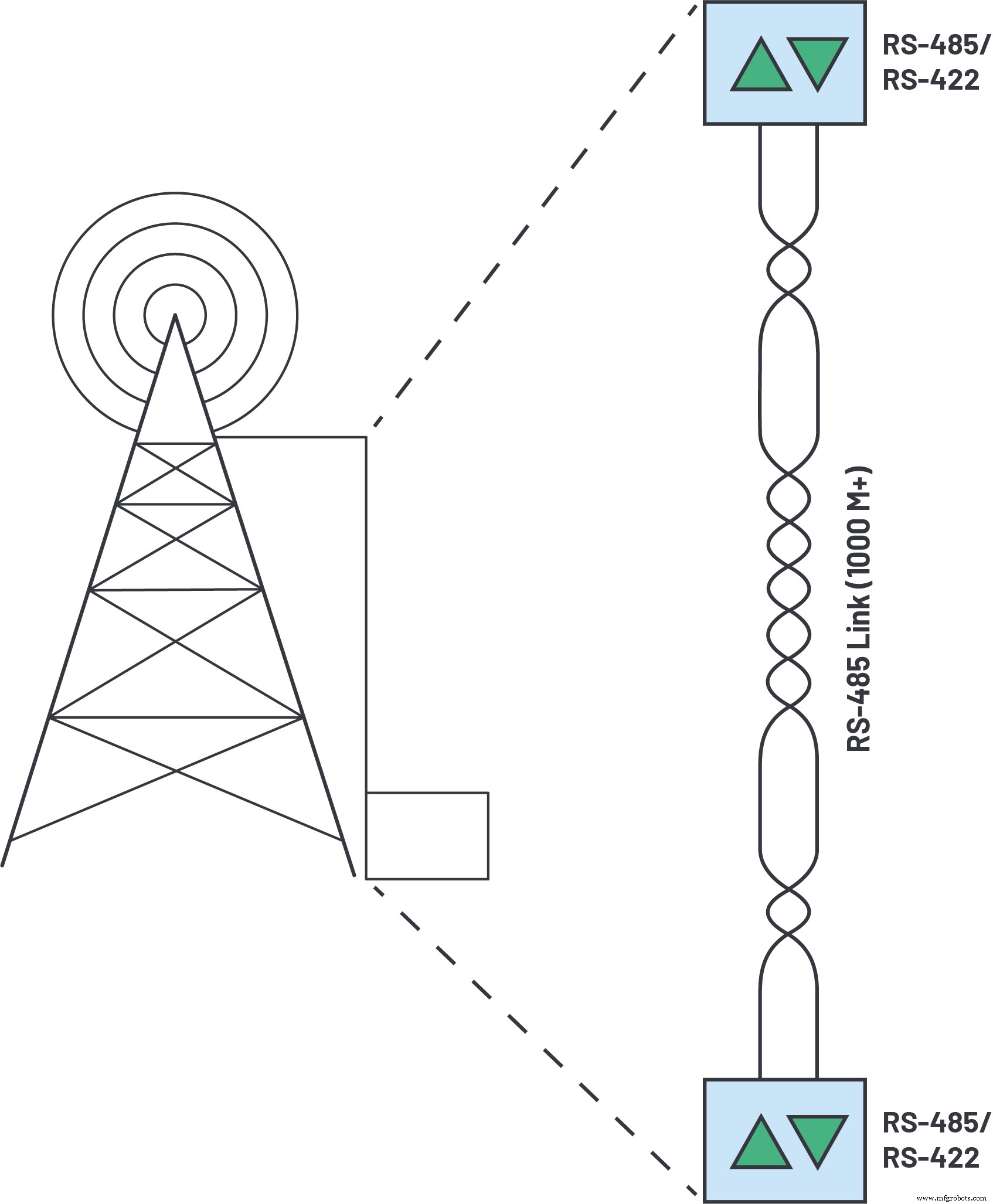
Onbetrouwbare gegevensoverdracht zal de algehele systeemprestaties verminderen. In motion control-toepassingen wordt veldbus doorgaans gebruikt voor closed-loop positieregeling van enkel- of meerassige motoren. Hoge datasnelheden en lange kabels komen vaak voor, zoals weergegeven in afbeelding 1. Als positieregeling onbetrouwbaar is, betekent prestatievermindering in de praktijk een lagere kwaliteit van de machinedoorvoer en verminderde fabrieksproductiviteit. In draadloze infrastructuurtoepassingen wordt veldbus doorgaans gebruikt voor kantel-/positieregeling van antennes, waar nauwkeurige gegevensoverdracht van cruciaal belang is. In zowel motion control- als draadloze infrastructuurtoepassingen zijn verschillende niveaus van EMC-bescherming vereist, zoals weergegeven in afbeelding 1. Motion control-toepassingen werken doorgaans in omgevingen met elektrische ruis, wat gegevensfouten kan veroorzaken. Ter vergelijking:draadloze infrastructuur moet worden beschermd tegen schadelijke indirecte blikseminslagen in een blootgestelde omgeving.
Voor deze veeleisende toepassingen is een zorgvuldig onderzoek van de timing van de RS-485-transceiver-timingprestaties over kabels vereist om een betrouwbaar systeem te garanderen, evenals EMC-karakterisering. Dit artikel introduceert enkele belangrijke concepten voor systeemtiming en communicatiekabels; biedt belangrijke prestatie-indicatoren, waaronder klok- en gegevensdistributie en kabelaansturing; en demonstreert voordelen voor industriële toepassingen met behulp van de volgende generatie RS-485-transceivers.
Timingprestaties
Bij het overwegen van betrouwbare gegevensoverdracht met hoge gegevenssnelheden over lange kabellengtes, worden timingprestatieconcepten, zoals jitter en scheeftrekking - vaak geassocieerd met laagspanningsdifferentiële signalering (LVDS) - belangrijk voor RS-485. Jitter en scheeftrekking toegevoegd door zowel de RS-485-transceiver als de systeemkabel moeten worden onderzocht.
klik voor grotere afbeelding
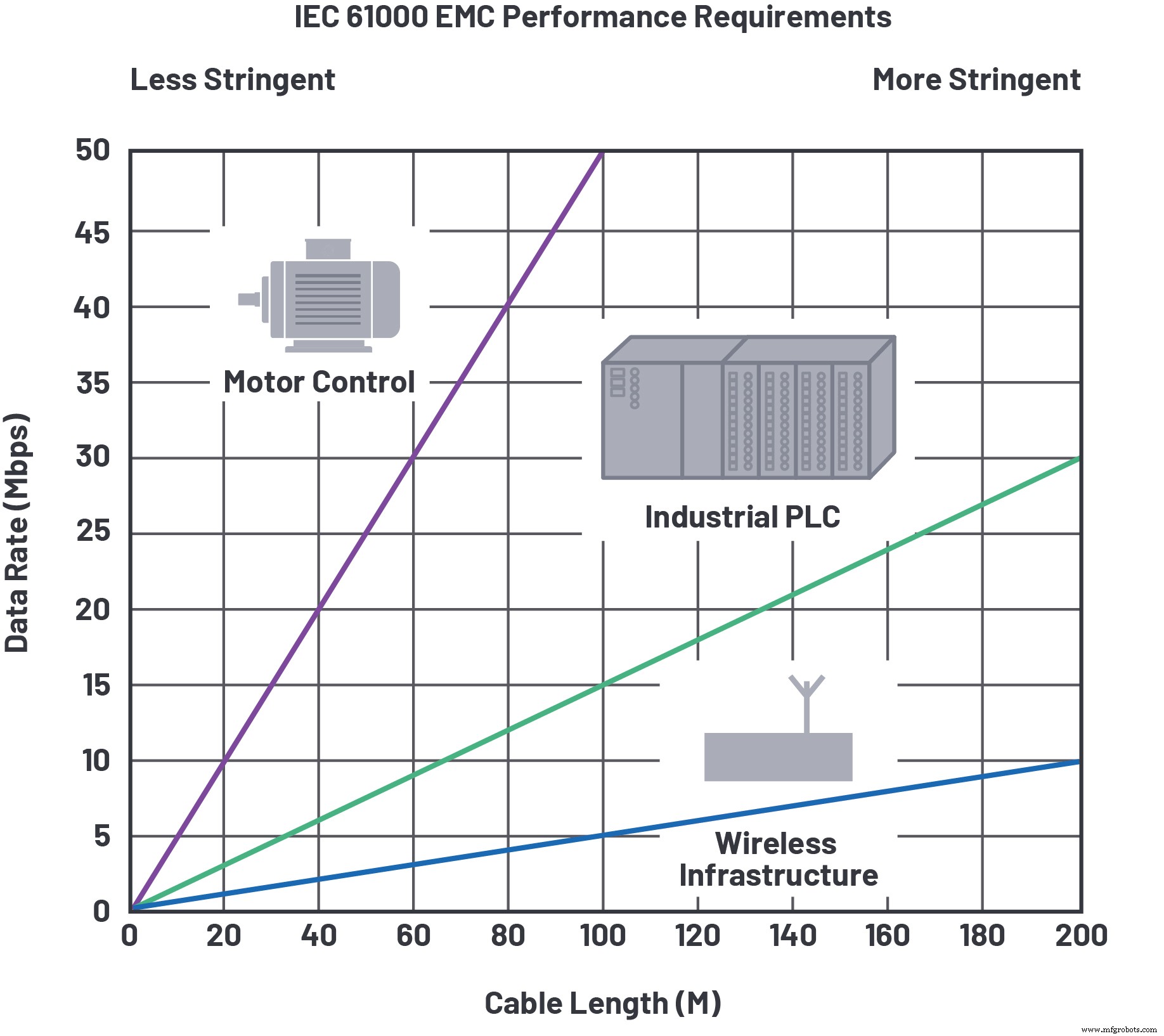
Figuur 1. EMC, datasnelheid en kabellengte voor RS-485. (Bron:Analoge apparaten)
Jitter en scheeftrekken
Jitter kan worden gekwantificeerd als een tijdsintervalfout, met name het verschil tussen de verwachte aankomsttijd van een signaalovergang en wanneer die overgang in de praktijk aankomt. Binnen een communicatieverbinding zijn er verschillende oorzaken van jitter. Elke bijdrager kan grofweg worden omschreven als willekeurig of deterministisch van aard. Willekeurige jitter kan worden geïdentificeerd aan de hand van de Gauss-verdeling en is afkomstig van thermische ruis en breedbandschotruis in een halfgeleider. Deterministische jitter is het resultaat van bronnen binnen het communicatiesysteem; bijvoorbeeld duty cycle-vervorming, overspraak, periodieke externe ruisbronnen of intersymboolinterferentie. In communicatiesystemen die de RS-485-standaard gebruiken, zijn de gegevenssnelheden lager dan 100 MHz, waarbij deze deterministische jittereffecten domineren over willekeurige effecten.
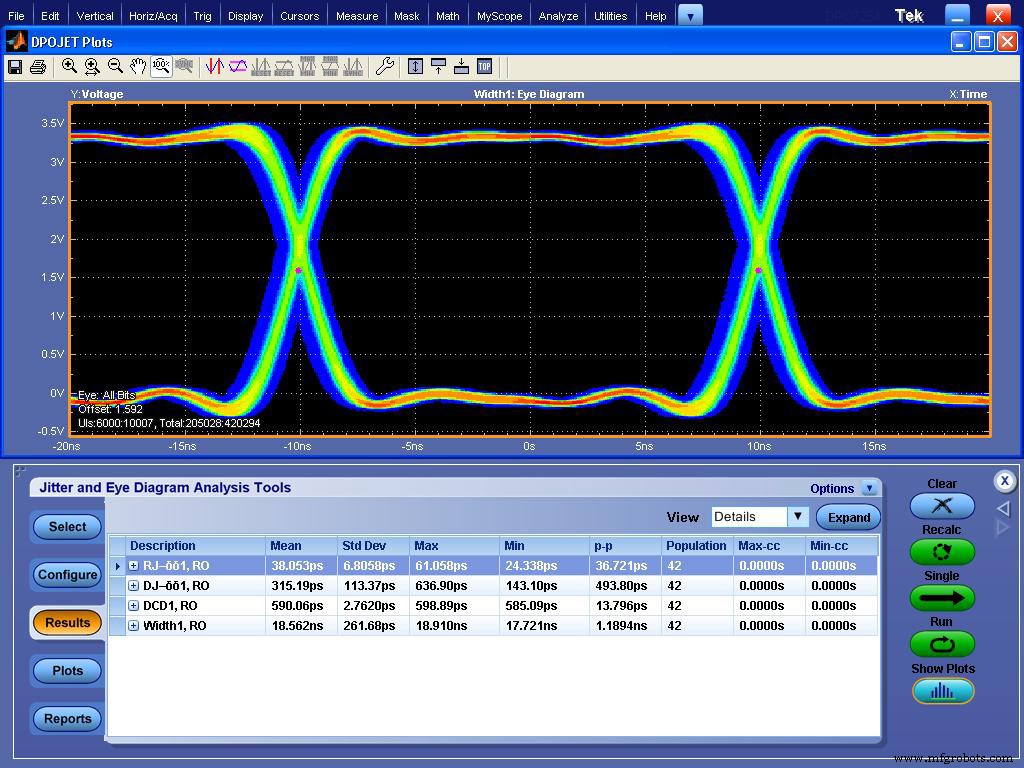
De piek-tot-piek jitterwaarde is een bruikbare maatstaf voor de totale systeemjitter als gevolg van deterministische bronnen. Piek-tot-piek jitter kan in het tijdsdomein worden onderzocht door een groot aantal signaalovergangen op hetzelfde scherm te leggen (algemeen bekend als een oogdiagram). Dit kan worden bereikt op een oscilloscoopscherm met oneindige persistentie, of met de ingebouwde jitter-ontledingssoftware van een oscilloscoop, zoals weergegeven in afbeelding 2. 2
klik voor grotere afbeelding
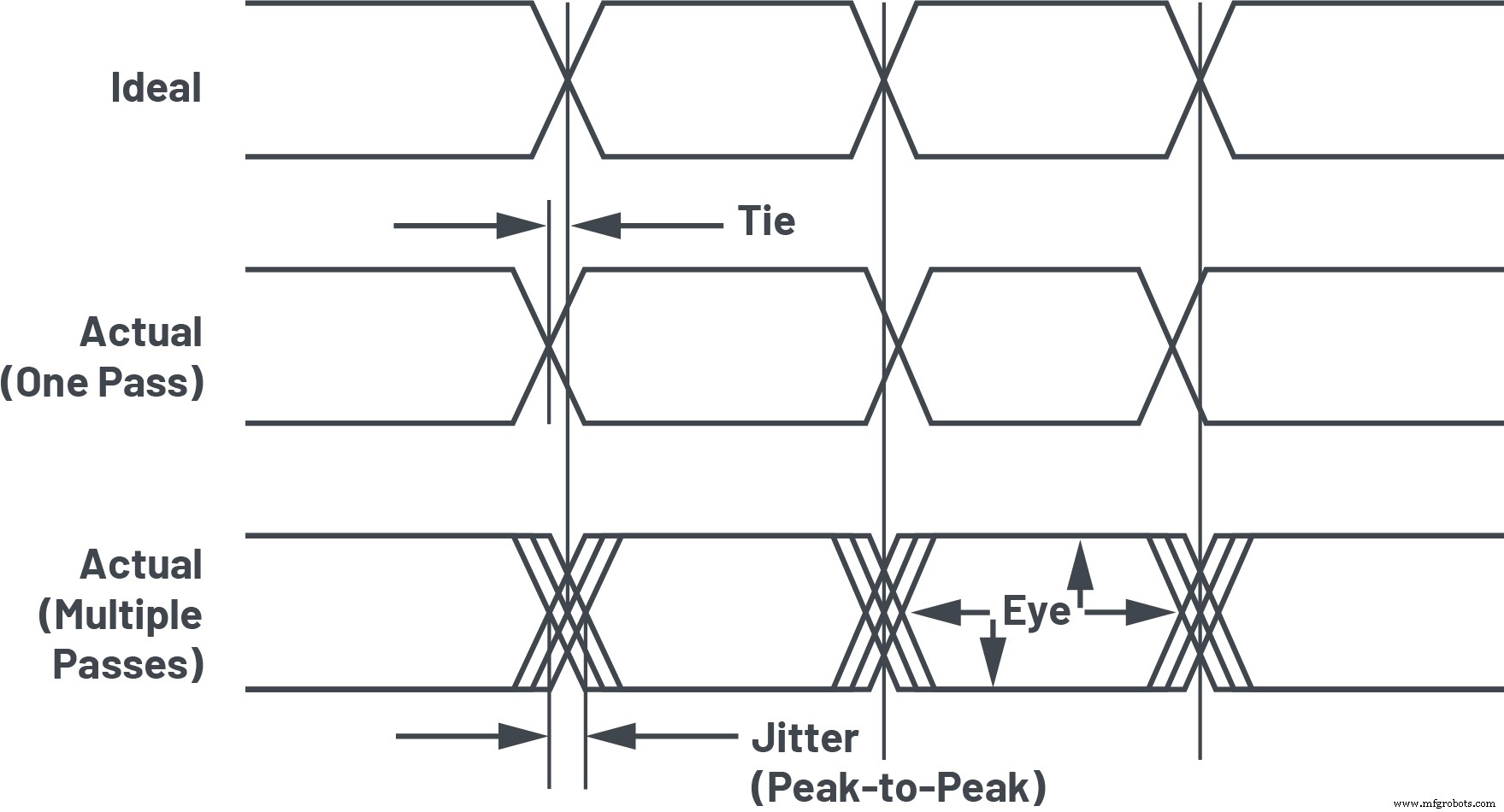
Figuur 2. Tijdsintervalfout, jitter en oog. (Bron:Analoge apparaten)
De breedte van de overlappende overgangen is de piek-tot-piek jitter, met het open gebied daartussen dat het oog wordt genoemd. Dit oog is het gebied dat beschikbaar is voor bemonstering door het ontvangende knooppunt aan het uiteinde van een lange RS-485-kabel. Een grotere oogbreedte geeft het ontvangende knooppunt een breder venster voor bemonstering en vermindert het risico op het onjuist ontvangen van een bit. Het beschikbare oog wordt voornamelijk beïnvloed door deterministische jitterbijdragen van zowel de RS-485-driver en -ontvanger als de verbindingskabel.
klik voor grotere afbeelding
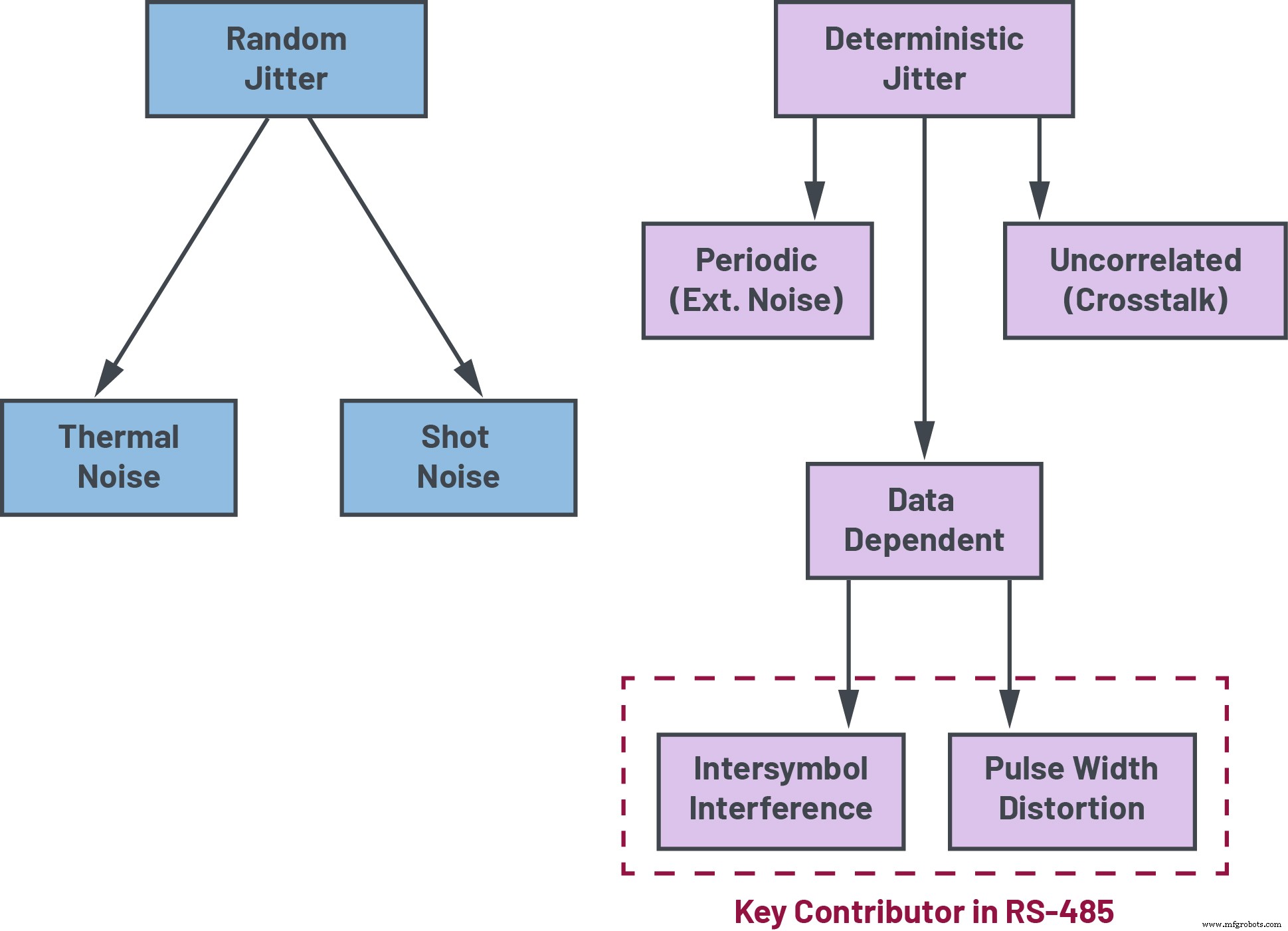
Figuur 3. Belangrijkste bijdragen aan jitter in RS-485-communicatienetwerken. (Bron:Analoge apparaten)
Figuur 3 toont de verschillende bronnen van jitter in een communicatienetwerk. In op RS-485 gebaseerde communicatiesystemen zijn de twee belangrijkste factoren die bijdragen aan de timing van de timing:pulsafwijking van de zendontvanger en intersymboolinterferentie. Pulsscheefheid, ook wel bekend als pulsbreedtevervorming of werkcyclusvervorming, is een vorm van deterministische jitter die wordt geïntroduceerd door de zendontvangers op de zendende en ontvangende knooppunten. Puls-skew wordt gedefinieerd als het verschil in de voortplantingsvertraging tussen de stijgende en dalende flanken van een signaal. In differentiële communicatie creëert deze scheefheid een asymmetrisch kruispunt en een mismatch tussen de duur van verzonden nullen en enen. In een klokdistributiesysteem manifesteert een overmatige pulsscheefheid zich als een vervorming in de werkcyclus van de verzonden klok. In een gegevensdistributiesysteem verhoogt deze asymmetrie de piek-tot-piekjitter die wordt waargenomen in het oogdiagram. In beide gevallen heeft een overmatige pulsafwijking een negatieve invloed op de signalen die via RS-485 worden verzonden en vermindert zowel het beschikbare bemonsteringsvenster als de algehele systeemprestaties.
Intersymboolinterferentie (ISI) treedt op wanneer de aankomsttijd van een signaalflank wordt beïnvloed door het datapatroon dat over die flank is gegaan. Intersymbool-interferentie-effecten worden prominent in toepassingen met langere kabelverbindingen, waardoor ISI een belangrijke bijdrage levert aan RS-485-netwerken. De langere interconnect creëert een RC-tijdconstante waarbij de kabelcapaciteit niet volledig is opgeladen aan het einde van een enkele bitperiode. In toepassingen waarbij de verzonden gegevens alleen uit een klok bestaan, is deze vorm van intersymboolinterferentie niet aanwezig. Intersymboolinterferentie kan ook worden veroorzaakt door impedantiemismatches op de kabeltransmissielijn, door lijnstompen of oneigenlijk gebruik van afsluitweerstanden. RS-485-transceivers met een hoge output-drive-sterkte helpen over het algemeen om ISI-effecten te minimaliseren, omdat ze minder tijd nodig hebben om de belastingscapaciteit van de RS-485-kabel op te laden.
Het percentage piek-tot-piek jitter dat toelaatbaar is, is sterk afhankelijk van de toepassing, en over het algemeen wordt 10% jitter gebruikt om de combinatie van RS-485-transceiver en kabelprestaties te benchmarken. Een combinatie van overmatige jitter en scheeftrekking beïnvloedt de bemonsteringscapaciteit van de ontvangende RS-485-transceiver, waardoor de kans op communicatiefouten toeneemt. In correct afgesloten transmissienetwerken resulteert het kiezen van een zendontvanger die geoptimaliseerd is om de pulsafwijking van de zendontvanger en intersymboolinterferentie-effecten te minimaliseren in een betrouwbaardere, foutloze communicatieverbinding.
RS-485-zendontvangerontwerp en kabeleffecten
De TIA-485-A/EIA-485-A RS-485-standaard 3 biedt specificaties voor het ontwerp en het werkbereik van RS-485-zenders en -ontvangers, inclusief spanningsuitgangsverschil (VOD), kortsluitkarakteristieken, common-mode belasting en ingangsspanningsdrempels en -bereiken. De timingprestaties van RS-485, inclusief scheeftrekking en jitter, worden niet gespecificeerd in de TIA-485-A/EIA-485-A-standaard en worden geoptimaliseerd door IC-leveranciers met productgegevensbladspecificatie.
Andere standaarden, zoals de TIA-568-B.2/EIA-568-B.2, telecommunicatiestandaard voor twisted pair-bekabeling 4 bieden achtergrond voor kabel ac en dc effecten op RS-485 signaalkwaliteit. Deze norm biedt overwegingen en testprocedures voor jitter-, scheeftrekkings- en andere timingmetingen, met prestatielimieten; de maximaal toegestane kabelafwijking van categorie 5e is bijvoorbeeld 45 ns per 100 m. Lees Verbeterde RS-485-prestaties voor meer informatie over de TIA-568-B.2/EIA-568-B.2-standaard en de gevolgen van het gebruik van niet-ideale bekabeling op de systeemprestaties.
Hoewel de beschikbare normen en productgegevensbladen een goede bron van nuttige informatie vormen, vereist elke zinvolle karakterisering van de systeemtimingprestaties een meting van een RS-485-transceiver op een lange kabel.
klik voor grotere afbeelding
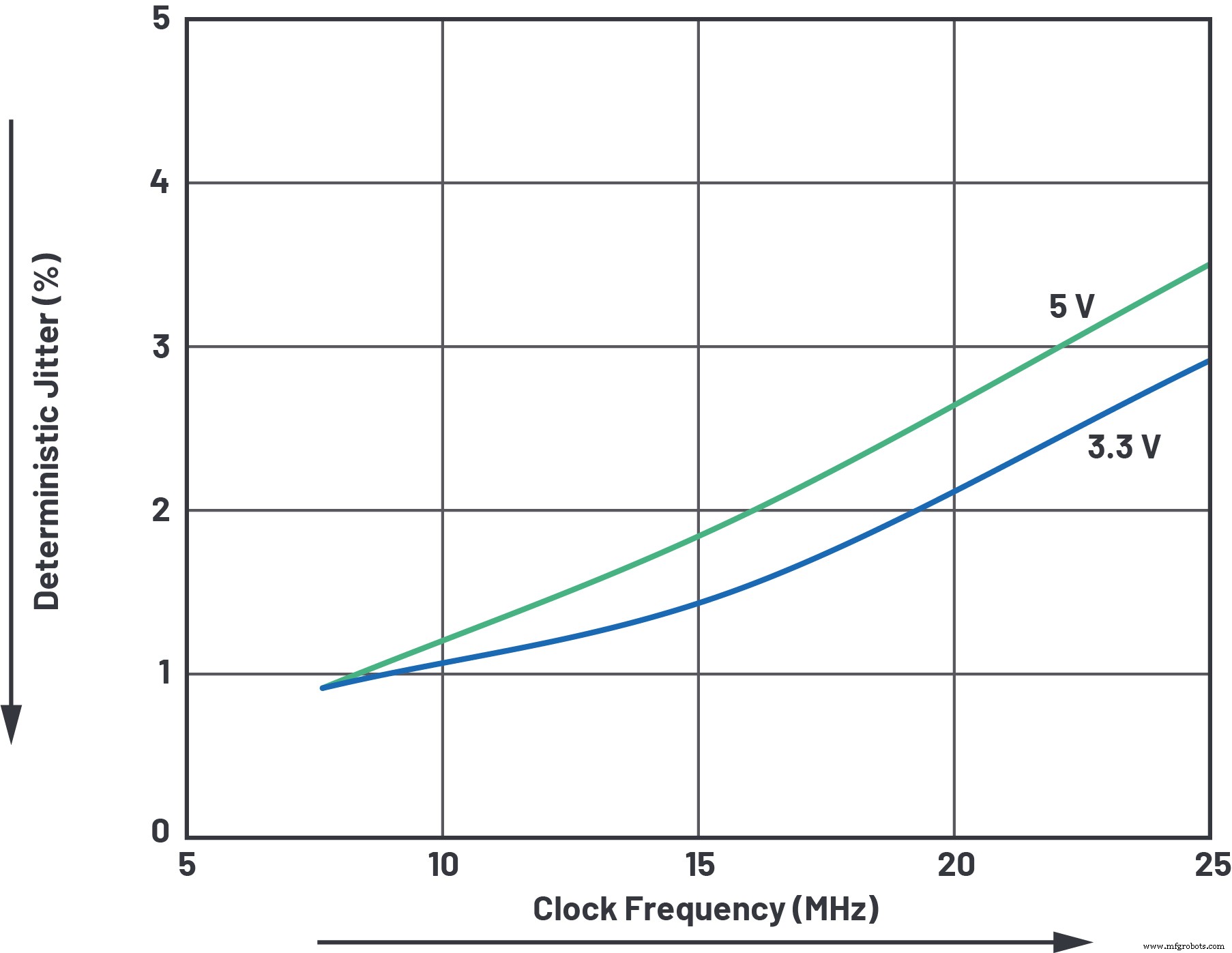
Figuur 4. ADM3065E typische klokjitterprestaties. (Bron:Analoge apparaten)
Sneller en verder communiceren met RS-485
De volgende generatie RS-475-transceivers bieden verbeterde prestaties om te voldoen aan de behoeften van toepassingen die gebruikmaken van standaarden zoals TIA-485-A/EIA-485-A die scheeftrekking en jitter niet definiëren. RS0485-transceivers zoals de ADM3065E van Analog Devices bieden bijvoorbeeld ultralage scheeftrekkingen van zender en ontvanger. Hierdoor kunnen systemen de overdracht van een precisieklok ondersteunen, die vaak voorkomt in motorcoderingsnormen, zoals EnDat 2.2. 5 Zoals weergegeven in afbeeldingen 4 en 5, is aangetoond dat systemen minder dan 5% deterministische jitter vertonen over typische kabellengtes die worden aangetroffen in motorbesturingstoepassingen. Het brede voedingsbereik van de transceiver betekent dat dit niveau van timingprestaties beschikbaar is voor toepassingen die een 3,3 V of 5 V transceivervoeding nodig hebben.
klik voor grotere afbeelding
Figuur 5. ADM3065E ontvangend oogdiagram:25 MHz klok verdeeld over 100 m kabel. (Bron:Analoge apparaten)
Naast superieure klokdistributie, maken verbeterde timingprestaties ook betrouwbare datadistributie mogelijk, met high-speed outputs en minimale toegevoegde jitter. Afbeelding 6 laat zien dat door gebruik te maken van een verbeterde transceiver, de timingbeperkingen die doorgaans worden genoemd voor RS-485-datacommunicatie aanzienlijk kunnen worden versoepeld. Standaard RS-485-transceivers worden doorgaans vermeld voor gebruik met 10% of minder jitter. De ADM3065E kan werken met meer dan 20 Mbps op maximaal 100 m kabel en toch slechts 10% jitter behouden op het ontvangende knooppunt. Dit lage niveau van jitter vermindert het risico van onjuiste bemonstering door het ontvangende gegevensknooppunt en resulteert in een betrouwbaarheid van verzending die voorheen niet mogelijk was met typische RS-485-transceivers. In toepassingen waar het ontvangende knooppunt jitterniveaus tot 20% kan tolereren, zijn datasnelheden tot 35 Mbps over 100 m kabellengtes haalbaar.
klik voor grotere afbeelding
Afbeelding 6. ADM3065E ontvangt dataknooppunt met superieure jitterprestaties. (Bron:Analoge apparaten)
Voor elk pakket dat wordt overgedragen met behulp van het EnDat 2.2-encoderprotocol, worden de gegevens synchroon met dalende klokflanken verzonden. Afbeelding 7 illustreert dat de startbit(s) beginnen met de gegevensoverdracht van de encoder terug naar de mastercontroller, na de initiële berekening van de absolute positie (TCAL). De daaropvolgende foutbits (F1, F2) geven aan wanneer een storing van de encoder kan leiden tot onjuiste positiewaarden. De encoder zendt dan een absolute positiewaarde uit, beginnend met LS, met daarop volgende data. De integriteit van klok- en datasignalen is van cruciaal belang voor een succesvolle positie- en foutsignalering over lange kabels, waarbij EnDat 2.2 een jitter van maximaal 10% specificeert. EnDat 2.2 specificeert maximale werking bij 16 MHz kloksnelheid over 20 m bekabeling. Afbeelding 4 laat zien dat aan deze vereisten kan worden voldaan met slechts 5% klokjitter, en afbeelding 6 laat zien dat aan de jittervereisten voor gegevensoverdracht wordt voldaan, terwijl standaard RS-485-transceivers dat niet doen. Dit is belangrijk omdat superieure timingprestaties ten opzichte van kabels ervoor zorgen dat systeemontwerpers over de nodige informatie beschikken om een ontwerp mogelijk te maken dat met succes is ontworpen om te voldoen aan de EnDat 2.2-specificatie.
klik voor grotere afbeelding
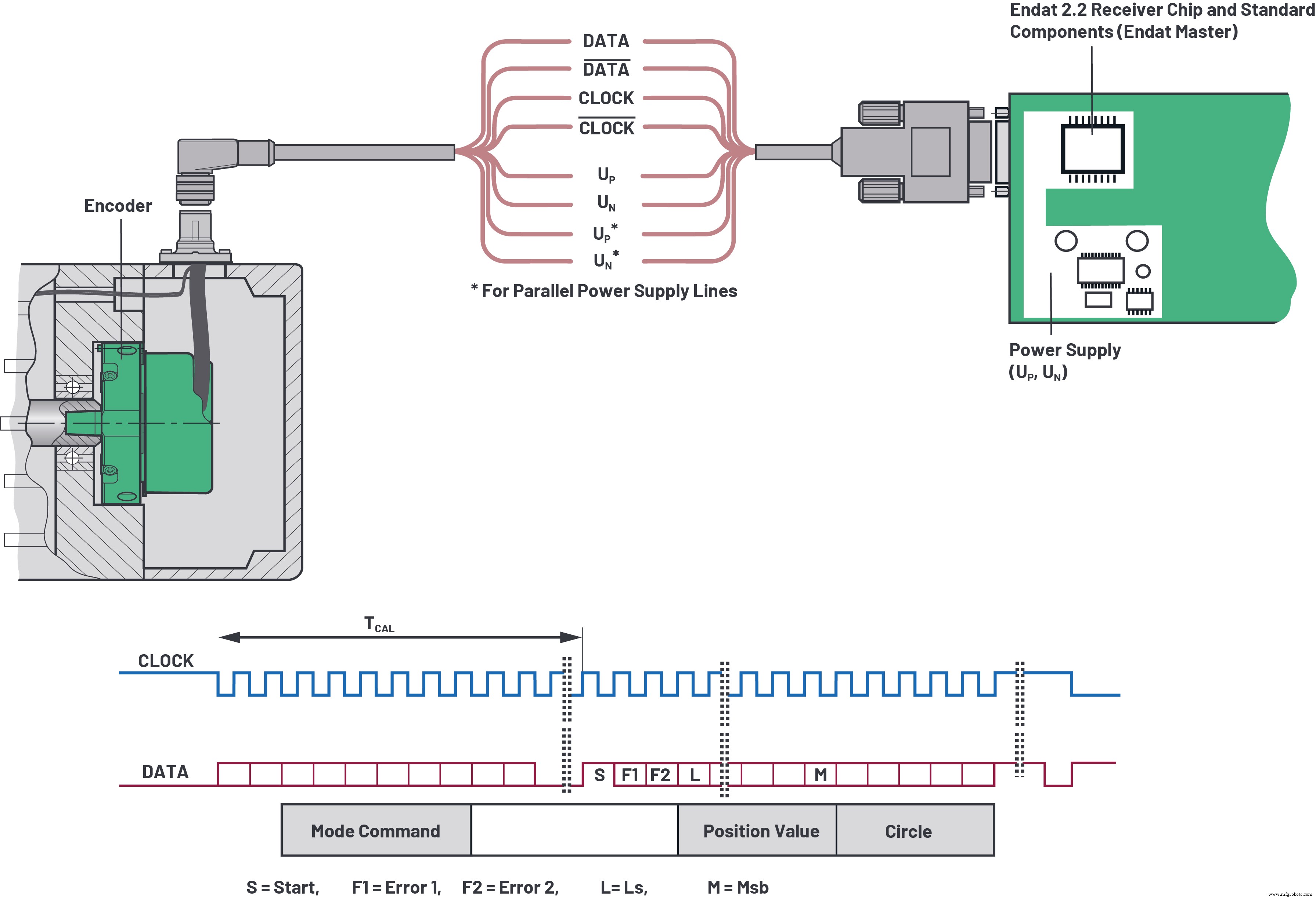
Figuur 7. EnDat 2.2 fysieke laag en protocol met klok/data synchronisatie (aangepaste diagrammen van EnDat 2.2). (Bron:Analoge apparaten)
Betere betrouwbaarheid over langere kabels
De TIA-485-A/EIA-485-A RS-485-standaard 3 vereist compatibele RS-485-stuurprogramma's om een differentiële spanningsamplitude, VOD, van ten minste 1,5 V te genereren in een volledig belast netwerk. Deze 1,5 VOD maakt 1,3 V gelijkspanningsverzwakking mogelijk over lange kabellengtes, waarbij RS-485-ontvangers gespecificeerd zijn om te werken met ten minste 200 mV ingangsverschilspanning. Met een zendontvanger die is ontworpen om een VOD van ten minste 2,1 V uit te voeren wanneer hij wordt gevoed op 5 V, kunnen ontwerpers de RS-485-specificatievereisten overschrijden.
Een volledig geladen RS-485-netwerk komt overeen met een differentiële belasting van 54 Ω, die een dubbel afgesloten bus van twee 120 Ω-weerstanden simuleert met nog eens 750 Ω, wat neerkomt op 32 aangesloten apparaten van 1 eenheidsbelasting, of 12 kΩ. De ADM3065E heeft een gepatenteerde uitgangsarchitectuur om de VOD te maximaliseren en tegelijkertijd te voldoen aan het vereiste common-mode spanningsbereik, wat de vereisten van TIA-485-A/EIA-485-A overtreft. Afbeelding 8 illustreert hoe de transceiver de drive-eisen van de RS-485-standaard overtreft met>210% bij voeding via een 3,3 V-voedingsrail, of met>300% bij voeding via een 5 V-voedingsrail. Hierdoor kunnen systemen verder communiceren, met meer afgelegen knooppunten en met meer ruismarge, dan gewone RS-485-transceivers.
klik voor grotere afbeelding
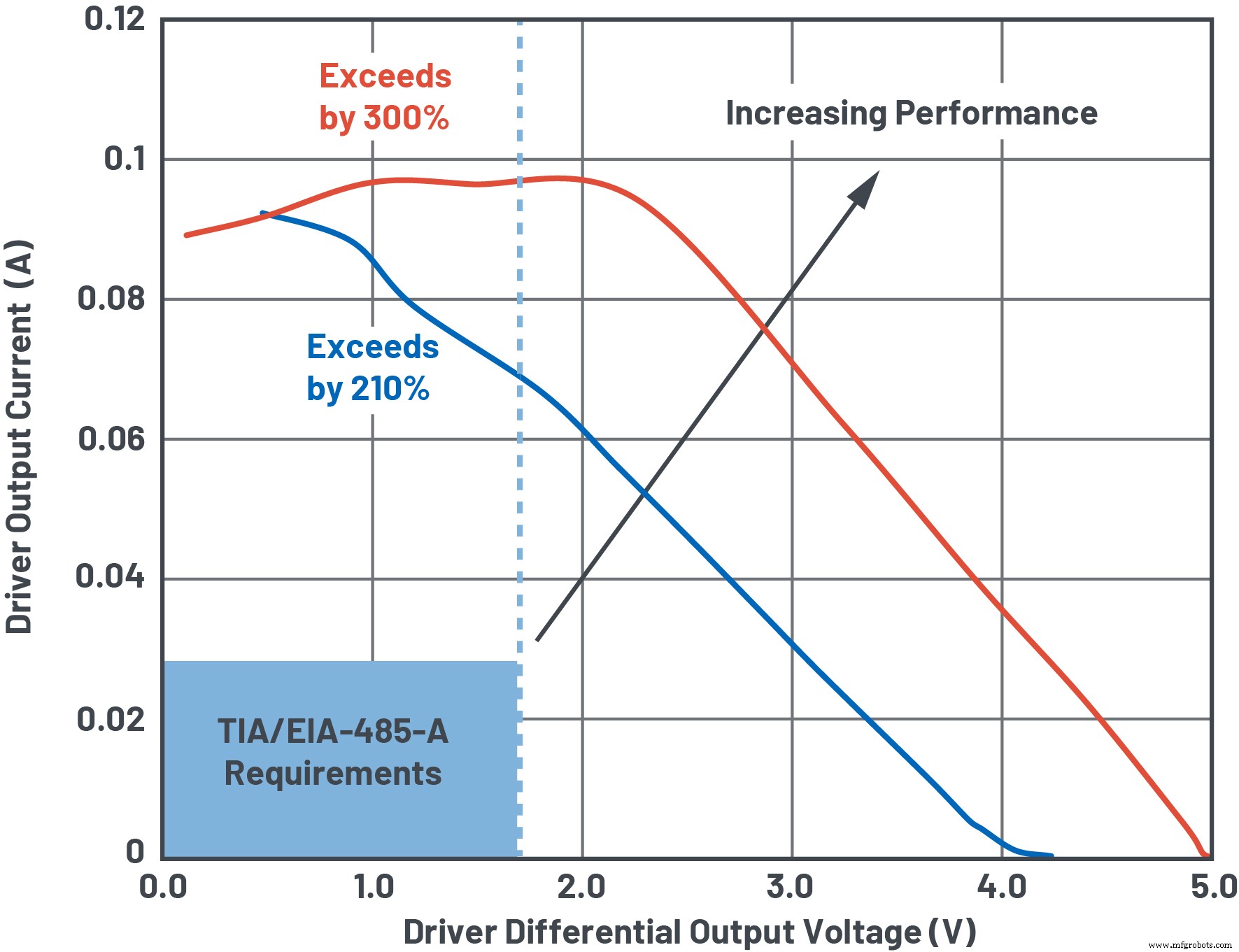
Figuur 8. De ADM3065E overtreft de RS-485-schijfvereisten voor een breed leveringsbereik. (Bron:Analoge apparaten)
Afbeelding 9 illustreert dit punt verder in een typische toepassing van meer dan 1000 m kabel. Bij communicatie via een standaard AWG 24-kabel is een verbeterde transceiver 30% beter dan een standaard RS-485-transceiver - met een 30% grotere ruismarge op het ontvangende knooppunt, of een 30% toename van de maximale kabellengte bij lage gegevenssnelheden. Deze prestatie is zeer geschikt voor draadloze infrastructuurtoepassingen, waarbij de RS-485-kabel langer is dan enkele honderden meters.
klik voor grotere afbeelding
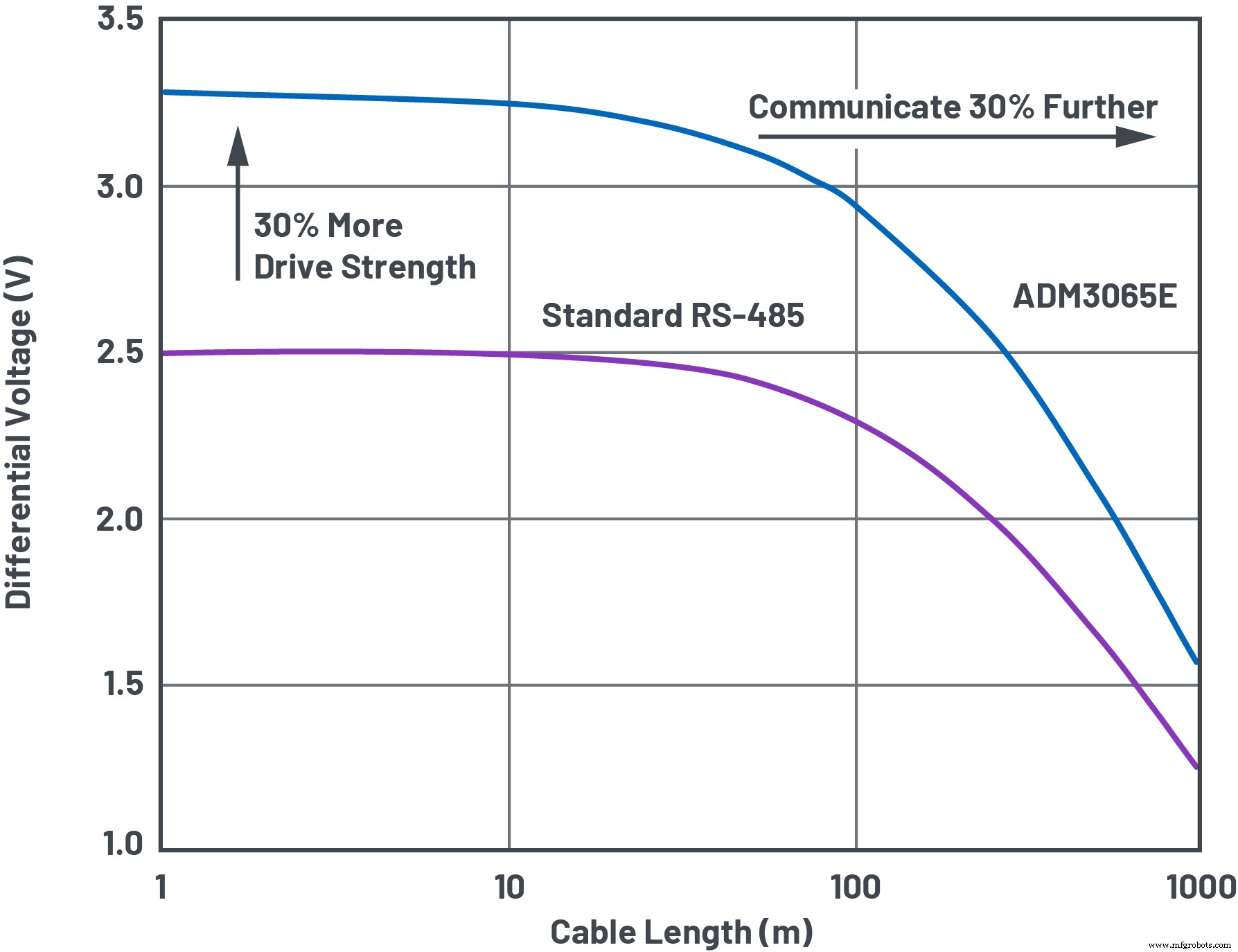
Figuur 9. ADM3065E levert een superieur differentieel signaal voor ultralange afstanden. (Bron:Analoge apparaten)
EMC-bescherming en geluidsimmuniteit
RS-485-signalering is gebalanceerd, differentieel en inherent ongevoelig voor ruis. Systeemruis koppelt gelijk aan elke draad in een RS-485 twisted pair-kabel. Twisted pair-bekabeling zorgt ervoor dat de geïnduceerde ruisstromen in tegengestelde richtingen stromen, en elektromagnetische velden die op de RS-485-bus zijn gekoppeld, heffen elkaar op. Dit vermindert de elektromagnetische gevoeligheid van het systeem. Bovendien zorgt een grotere aandrijfkracht voor een grotere signaal-ruisverhouding (SNR) in communicatie. Over lange kabeltrajecten, zoals honderden meters tussen grondniveau en antenne op draadloze basisstations, zorgt een verbeterde SNR en uitstekende signaalintegriteit voor nauwkeurige en betrouwbare kantel-/positiecontrole van antennes.
klik voor grotere afbeelding
Afbeelding 10. Kabellengten voor draadloze infrastructuur kunnen zich uitstrekken over honderden meters. (Bron:Analoge apparaten)
Zoals aangegeven in afbeelding 1 is EMC-bescherming vereist voor RS-485-transceivers die rechtstreeks met de buitenwereld communiceren via aangrenzende connectoren en bekabeling. ESD op de blootgestelde RS-485-connectoren en bekabeling voor de encoder naar de motoraandrijving is bijvoorbeeld een veelvoorkomend systeemrisico. De IEC 61800-3-norm op systeemniveau met betrekking tot EMC-immuniteitsvereisten voor elektrische aandrijfsystemen met instelbare snelheid vereist een minimaal ±4 kV contact/±8 kV lucht IEC 61000-4-2 ESD-bescherming. Verbeterde transceivers zoals de ADM3065E overtreffen deze vereiste met ±12 kV contact/±12 kV lucht IEC 61000-4-2 ESD-bescherming.
klik voor grotere afbeelding
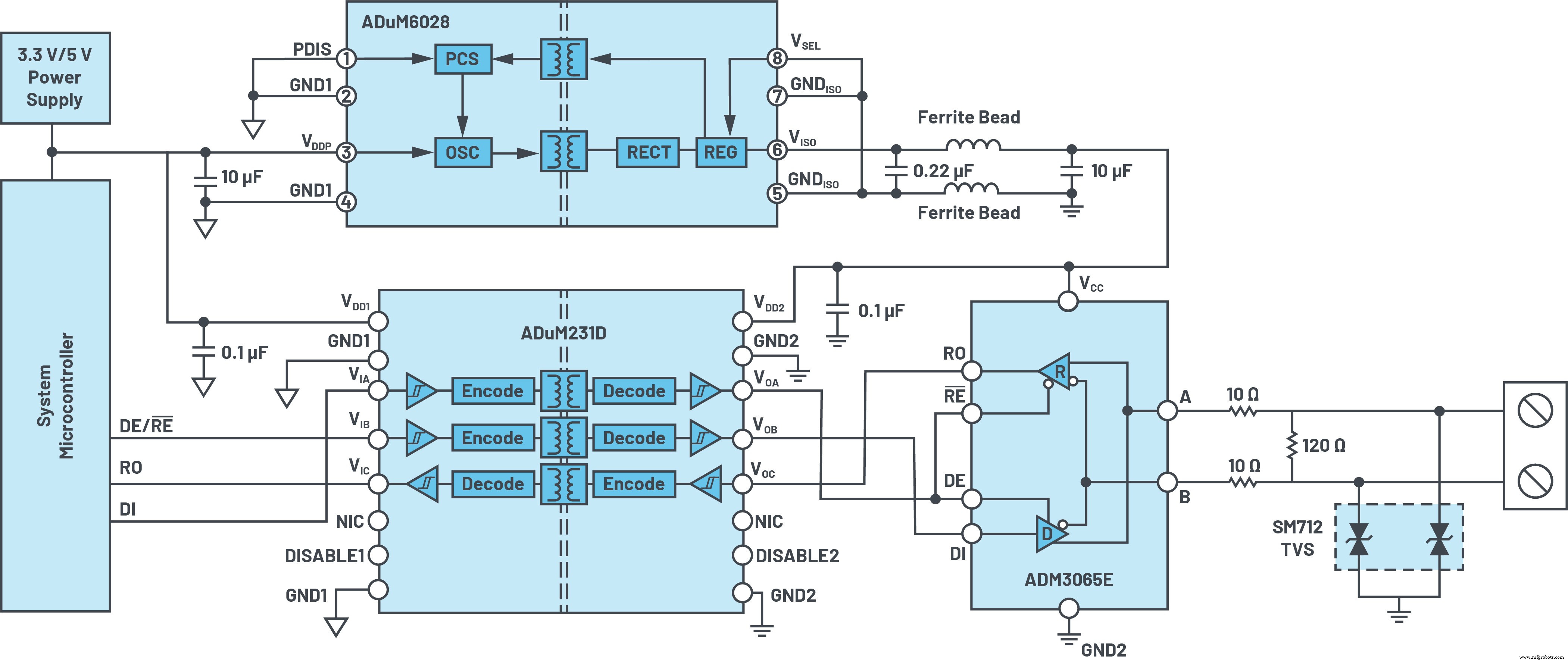
Figuur 11. Complete 25 Mbps signaal- en stroomgeïsoleerde RS-485-oplossing met ESD, EFT en overspanningsbeveiliging. (Bron:Analoge apparaten)
Voor draadloze infrastructuurtoepassingen is verbeterde EMC-bescherming vereist om te beschermen tegen schadelijke blikseminslaggebeurtenissen. Het toevoegen van een SM712 TVS en twee 10 Ω coördinerende weerstanden aan de transceiveringangen zorgt voor verbeterde EMC-bescherming—met tot ±30 kV 61000-4-2 ESD-bescherming en ±1 kV IEC 61000-4-5 overspanningsbeveiliging.
Om de ruisimmuniteit voor elektrisch agressieve motorbesturing, procesautomatisering en draadloze infrastructuurtoepassingen te vergroten, kan galvanische isolatie worden toegevoegd. Galvanische isolatie, met versterkte isolatie en een tijdelijke weerstand van 5 kV rms, kan aan de ADM3065E worden toegevoegd met i van Analog Devices. Koppeling ® en iso Power ® technologie. De ADuM231D biedt de vereiste drie kanalen van 5 kV rms-signaalisolatie, met nauwkeurige timingprestaties die een robuuste werking mogelijk maken met snelheden tot 25 Mbps. De geïsoleerde dc-naar-dc-converter ADuM6028 levert het vereiste geïsoleerde vermogen met een weerstandsvermogen van 5 kV rms. Er worden twee ferrietkralen gebruikt om gemakkelijk te voldoen aan EMC-normen zoals EN 55022 Klasse B/CISPR 22, wat resulteert in een compacte geïsoleerde dc-naar-dc-oplossing in een vormfactor van 6 mm × 7,5 mm.
De volgende generatie RS-485-transceivers overtreffen de industriestandaarden, waardoor de mogelijkheid wordt geboden om verder en sneller te communiceren in vergelijking met standaard RS-485-apparaten. Bij 10% jitterniveaus gespecificeerd in EnDat 2.2 5 , kunnen systemen werken met een kloksnelheid van 16 MHz over maximaal 20 m bekabeling, waarbij de standaard RS-485 moeite heeft om aan deze eis te voldoen. Overtreft de RS-485-bus-aandrijfvereisten tot 300%, biedt betere betrouwbaarheid en meer ruismarge over langere kabels. Ruisimmuniteit kan worden verbeterd door i . toe te voegen Koppelingsisolatie, inclusief de ADuM231D signaalisolator, en de kleinste vormfactor geïsoleerde stroomoplossing in de branche, de ADuM6028.
Referenties
1 “PROFINET- en PROFIBUS-knooppunten tellen in 2018 meer dan 87 miljoen.” Profibus Group, mei 2019.
2 Conal Watterson. "LVDS- en M-LVDS Circuit-implementatiegids." Analog Devices, Inc., maart 2013.
3 "TIA / EIA-485-A, elektrische kenmerken van generatoren en ontvangers voor gebruik in gebalanceerde digitale multipoint-systemen." IHS Markit Inc., maart 1998.
4 "TIA/EIA-568-B.2, Commerciële telecommunicatiebekabelingsnorm voor gebouwen - Deel 2:Balanced Twisted Pair-bekabelingscomponenten." Vereniging voor de telecommunicatie-industrie, mei 2001.
5 "EnDat 2.2 - Bidirectionele interface voor positie-encoders." Heidenhain, september 2017.
Ingebed
- Bewaar en beheer gevoelige gegevens met Secret Manager
- DATA MODUL:grote open frame monitoren met hoge helderheid en easyTouch-functie
- Microchip:24-bit en 16-bit ADC's met datasnelheden tot 153,6 kSPS
- Apacer:industriële SV250 SSD-serie met lees-/schrijfsnelheden van 560 en 520 MB/s
- Arrow teams met ADLINK en Microsoft om snellere implementatie van industriële IoT-oplossingen mogelijk te maken
- Contrinex:cloud-ready slimme sensoren en veiligheidslichtgordijnen met Bluetooth-interface
- Van data naar grafiek:een webreis met Flask en SQLite
- Sneller ontwerpen en produceren met Formlabs en Fusion 360
- Wat moet ik doen met de gegevens?!
- Digitale transformatie versnellen met IoT-gegevens, dankzij Cisco en IBM
- Hoe IOT echt te maken met Tech Data en IBM Part 2