


Casestudy:Verbetering van de workflow voor additieve productie
Het verbeteren van uw softwareworkflow kan uw 3D-printproces essentiële minuten besparen. Hier leest u hoe onderzoekers de workflow voor additieve productie hebben verbeterd met RoboDK.
Wanneer u 3D-print met een robot, kan uw softwareworkflow een belangrijke impact hebben op uw productiviteit. Als je zelfs maar een paar minuten van de workflow kunt besparen, kan dit zich na verloop van tijd vertalen in behoorlijk wat extra productiviteit.
De tijd die u nodig heeft om tussen verschillende softwarepakketten te schakelen is meestal kort, maar het maakt uw workflow minder soepel en kan als gevolg daarvan additive manufacturing minder efficiënt maken.
Onderzoekers uit Portugal en Noorwegen hebben onlangs een applicatie ontwikkeld om RoboDK's additive manufacturing-workflow nog verder te stroomlijnen via de RoboDK API.
Maak kennis met de onderzoekers
Deze technische toepassing is ontwikkeld voor een onderzoek door onderzoekers Filipe Monteiro Ribeiro en J. Norberto Pires van de Universiteit van Coimbra, Portugal, en Amin S. Azar van SINTEF, het toonaangevende centrum voor fabricageonderzoek in Noorwegen.
De studie, getiteld “Implementatie van een robotbesturingsarchitectuur voor toepassingen voor additieve fabricage“ werd eerder dit jaar gepubliceerd in het tijdschrift Industrial Robot.
Wat probeerden de onderzoekers te bereiken?
RoboDK is een geweldige manier om robotica toe te voegen aan additive manufacturing. We hebben al gezien dat mensen het gebruiken voor het printen van een breed scala aan objecten, waaronder 3D-geprinte betonconstructies, 3D-geprinte kunst en 3D-geprint voedsel.
De workflow voor 3D-printen is al behoorlijk goed in RoboDK - u genereert eenvoudig de GCODE met een slicer-software (meestal de open source Slic3r) en laadt vervolgens het resulterende pad in RoboDK.
Het team van onderzoekers heeft echter vastgesteld dat RoboDK alleen niet de meest gestroomlijnde workflow mogelijk maakt. Hun onderzoek schetst een programma dat ze hebben ontwikkeld om de mogelijkheden van RoboDK en Slic3r direct te combineren zonder dat G-codebestanden handmatig tussen de twee programma's hoeven te worden verplaatst.
Om dit te bereiken heeft het team een grafisch programma ontwikkeld met Python en de RoboDK API.
De doelen voor dit onderzoek waren:
- Een simulatie van additieve fabricage ontwikkelen — Dit is bijzonder eenvoudig met RoboDK, dat een intuïtieve omgeving biedt voor robotsimulatie. Het team heeft ook een eenvoudig Python-programma toegevoegd om de afzetting van 3D-geprint materiaal te simuleren, aangezien dit momenteel niet iets is dat RoboDK zichzelf simuleert.
- Om offline simulatie van robots mogelijk te maken — Volgens de onderzoekers was dit een essentieel onderdeel van hun toepassing, omdat het gebruik van een virtuele omgeving het risico op schade aan een echte robot verkleinde. RoboDK maakt het heel eenvoudig om het gesimuleerde robotprogramma om te zetten in code voor de echte robot via zijn talrijke postprocessors.
- Asynchrone bewerking — Het was belangrijk voor het team dat het programma dat ze maakten de werking van de gesimuleerde robot in RoboDK niet hinderde. De simulatie zou bijvoorbeeld moeten blijven draaien wanneer het programma een nieuw model in Slic3r laadde. Dit is eenvoudig te bereiken met onze robolink Python-module, die een asynchrone koppeling biedt tussen RoboDK en elk Python-programma.
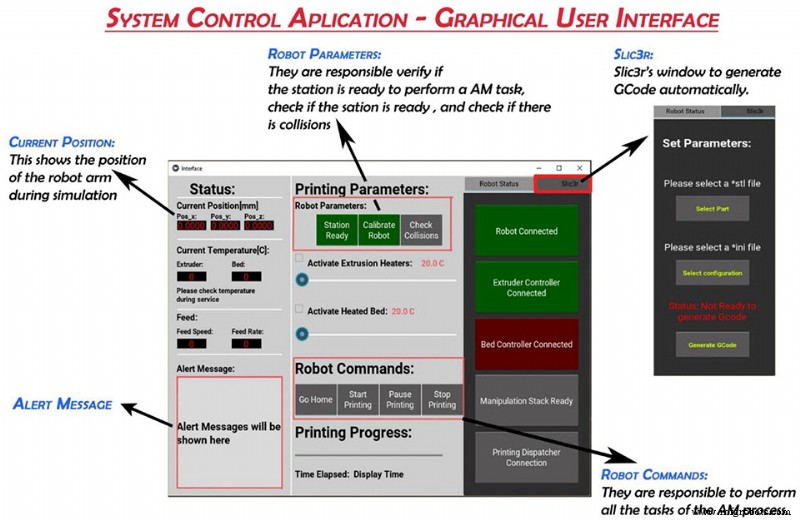
Het resulterende programma bevindt zich tussen Slic3r en RoboDK en coördineert het additieve fabricageproces.
Wat heeft het onderzoek aangetoond?
De applicatie van het team maakte zeer goed gebruik van de mogelijkheden van RoboDK. Ze lieten vooral zien hoe effectief het kan zijn om de API te gebruiken om delen van je eigen workflow te combineren.
De RoboDK API is een zeer krachtig onderdeel van RoboDK, maar wordt door veel van onze gebruikers niet gebruikt. Dit is jammer, omdat het kan helpen om de soepelheid van de workflow van uw robotprogrammering aanzienlijk te verbeteren. Het ondersteunt verschillende programmeertalen, maar de Python-bibliotheek die de onderzoekers gebruikten, is bijzonder gemakkelijk te gebruiken - ervan uitgaande dat je de programmeertaal Python leuk vindt (en waarom zou je niet? Het is zo'n gemakkelijke taal!).
Het voordeel van asynchrone werking
Een van de belangrijkste aspecten in het onderzoek was de asynchrone werking. Het was belangrijk voor het team om ervoor te zorgen dat geen enkel onderdeel van het programma de werking van een ander onderdeel van het programma zou stoppen.
RoboDK draait al op een asynchrone manier - je kunt meerdere Python-scripts tegelijkertijd uitvoeren en ze zullen elkaar niet hinderen - maar het team had een eigen programma nodig om ook deze asynchrone mogelijkheid te hebben.
Ze wilden bijvoorbeeld niet dat hun programma "vastliep" tijdens het wachten tot Slic3r klaar was met het genereren van GCODE. Ze moesten de robot kunnen besturen terwijl het programma andere dingen deed. Dit hebben ze bereikt met de asyncio bibliotheek voor Python, een populaire optie voor gelijktijdig programmeren.
Hoe u uw eigen workflow kunt verbeteren met de API
Hoewel het onderzoek is uitgevoerd door robotica-onderzoekers, denk niet dat dit betekent dat programmeren met de RoboDK API ingewikkeld is. Zelfs als u geen programmeerwizard bent, kunt u de API eenvoudig zelf gebruiken.
Als u uw eigen programma wilt ontwikkelen om uw workflow te verbeteren, kunt u de volgende stappen volgen:
- Maak kennis met de API via de documentatiepagina. Lees over de mogelijkheden en bedenk waarvoor u het in uw toepassing zou kunnen gebruiken.
- Plan welke delen van uw applicatie u in het externe programma gaat coderen.
- Maak uw programma met behulp van de API voor interactie met RoboDK.
- Test uw programma voordat u het in uw proces integreert.
U hoeft natuurlijk niet uw eigen code te schrijven om uw workflow te verbeteren. U kunt ook de RoboDK-plug-ins gebruiken voor programma's zoals SolidWorks, die ook de workflow stroomlijnen wanneer u andere programma's gebruikt in combinatie met RoboDK.
Maar, zoals het team van onderzoekers heeft aangetoond, kan de API zeer effectief zijn in het gladstrijken van ongelijksoortige delen van uw workflow voor software die nog geen plug-in heeft.
Onthoud dat zelfs het schrappen van een paar minuten van uw programmeerproces op de lange termijn tot extra productiviteit kan leiden.
Wat zou u kunnen bereiken door de API in uw proces te gebruiken? Vertel het ons in de reacties hieronder of neem deel aan de discussie op LinkedIn , Twitter , Facebook, Instagram of in het RoboDK-forum .
Industriële robot
- 3D-printen versus additieve productie:wat is het verschil?
- De waarde van additieve productie in de auto-industrie
- Wat is de businesscase voor het uitvoeringssysteem voor additieve fabricage bij de productie van reserveonderdelen?
- De stap naar echte hybride processen in additieve productie
- Is hybride productietechnologie de toekomst van additieve productie?
- De digitale draad verbinden:additieve productie opschalen met MES/Workflow-software
- 5 trends die de toekomst van additieve productie vormgeven [2021]
- De zaak om Amerikaanse productie naar huis te halen
- De zaak voor 3D-printen in de productie
- De impact van additive manufacturing op industriële productie
- De belangrijkste soorten additieve productie