


Megapixel foton-tellende cameratechnologie
Stel je een camera voor die is ontworpen om beelden vast te leggen met een resolutie van een enkel foton bij 24.000 frames per seconde. Dankzij een elektronische sluiter die slechts 3,8 ns open kan blijven en die kan worden gesynchroniseerd met snelle laserpulsen met een duur van slechts enkele picoseconden, kan men letterlijk licht zich door de ruimte zien voortplanten. Met deze mogelijkheid openen zich nieuwe toepassingen zoals kwantumvisie, spookbeeldvorming, sub-shot-ruisbeeldvorming, kwantum LiDAR en kwantumdestillatie, om er maar een paar te noemen.
Gemeenschappelijk voor deze toepassingen is de behoefte aan detectie van één foton en een hoge timingresolutie met weinig ruis en een hoge gevoeligheid. Deze nieuwe camera is tot dat alles in staat, maar bovendien doet hij het op een miljoen pixels tegelijk, waardoor het vastleggen en mogelijk reconstrueren aanzienlijk wordt versneld. In de kern van deze pixels bevindt zich een single-photon lawinediode (SPAD) die fotondetectie uitvoert en een digitale puls genereert. Deze puls kan worden geteld of van een tijdstempel worden voorzien, waardoor het fotonen tellen en het tijdsopgeloste karakter van de camera ontstaat.
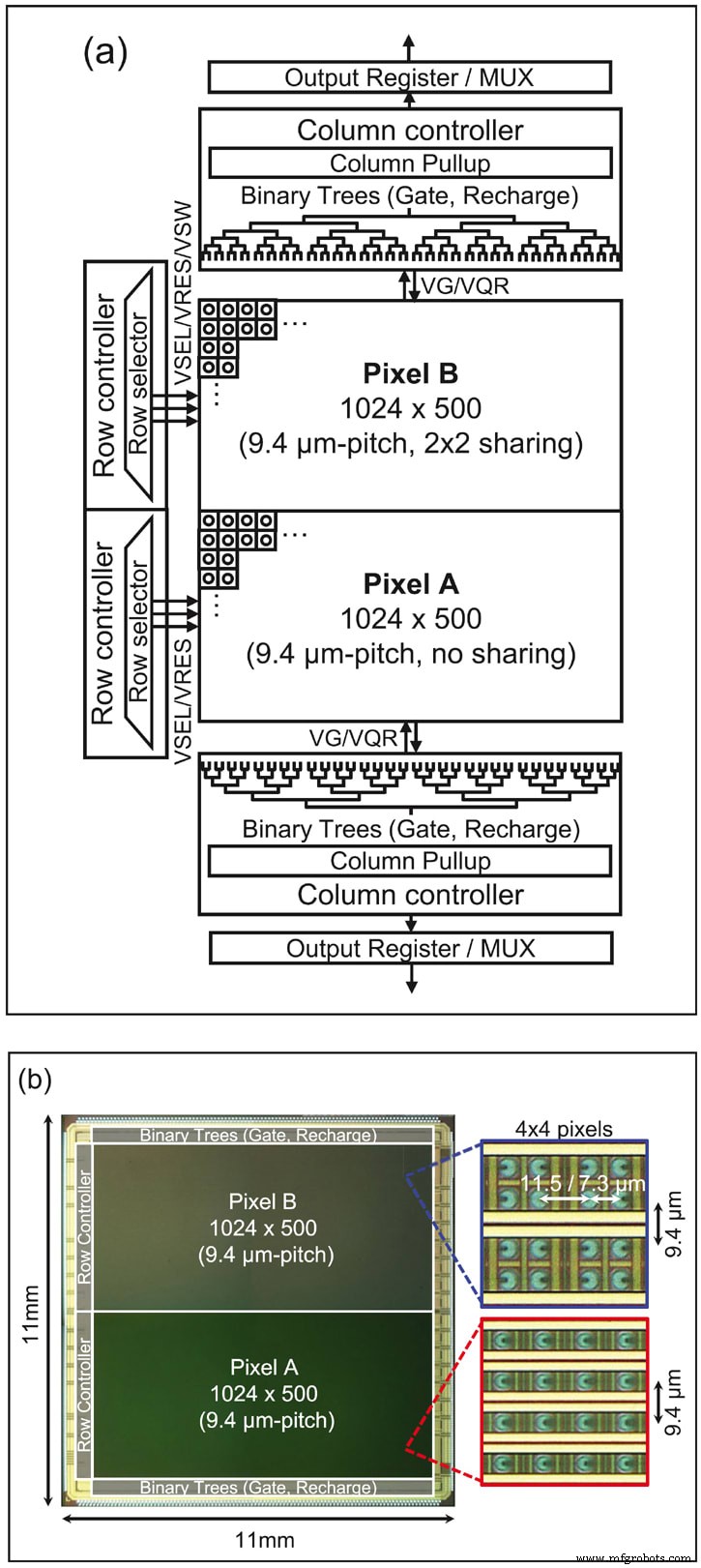
In een paper gepubliceerd in het peer-reviewed tijdschrift Optica, presenteerden we de eerste 1-Mpixel camera op basis van de SPAD-pixels. De pixels hebben een pitch van 9,4 m, met een 7T (7 transistors per pixel) of 5,75T architectuur. De microfoto van de camerachip wordt weergegeven in figuur 1 (b). Het camerablokdiagram wordt getoond in figuur 1(a); het bestaat uit een dubbele binaire boom voor het besturen van de sluiter met een precisie van ongeveer 100ps en een positie die kan worden afgesteld in stappen van 36ps. Dit maakt het mogelijk om 3D-beelden te reconstrueren door de vluchttijd van een lichtpuls te meten wanneer deze de laser verlaat en wordt gereflecteerd door een object. Het maakt het ook mogelijk om licht tijdens de vlucht vast te leggen, waardoor interessante relativistische effecten in het laboratorium worden blootgelegd.
De chip werd getest als een intensiteitsbeeldsensor met een standaardkaart (Figuur 2(a)) tot 14-bits op pixelniveau. Figuren 3 (a) en (b) tonen een 2D en kleurgecodeerde 3D-afbeeldingen die zijn verkregen door een scène te verlichten met een 637 nm-laser gepulseerd op 40 MHz en vastgelegd op de beeldsensor met halve resolutie. Het poortvenster met zijn lengte van 3,8 ns wordt verschoven van 0,6 ns naar 13,2 ns in stappen van 36 ps om volledige fotonintensiteitsprofielen te verkrijgen als functie van de poortpositie.

De afstand LSB in deze meting komt overeen met 5,4 mm. De diepte-informatie wordt gereconstrueerd door de positie van de stijgende flank van het afgevlakte intensiteitsprofiel voor elke pixel te detecteren, overeenkomend met de aankomsttijd van de gereflecteerde laserpuls. De gate timing scheefheid over de array wordt gecompenseerd door onafhankelijk gemeten timing scheefheid distributie af te trekken van de gemeten tijd-van-aankomst distributie. In figuur 3(b) geeft rode kleur een grotere afstand tot de SPAD-camera aan, terwijl blauwe kleur overeenkomt met een grotere afstand. Het maximale dieptebereik voor deze meting was ingesteld op 2 m, maar het kan worden uitgebreid tot tientallen meters door de laserherhalingsfrequentie te verlagen en de poortstap te vergroten.
De fijne gate scanning pitch en lange belichting worden gebruikt om een hoge diepteprecisie te bereiken, en de resulterende data-acquisitietijd voor deze meting was enkele tientallen seconden. Dit is aanzienlijk langer dan die van andere meetmethoden zoals indirecte vluchttijd, maar het kan gemakkelijk worden verminderd door de gate-scansteek te vergroten, het scanbereik te verkleinen en het laservermogen te vergroten om de belichtingstijd te verkorten. Daarnaast wordt verdere verbetering verwacht door de implementatie van een on-chip microlens om de gevoeligheid te verhogen.
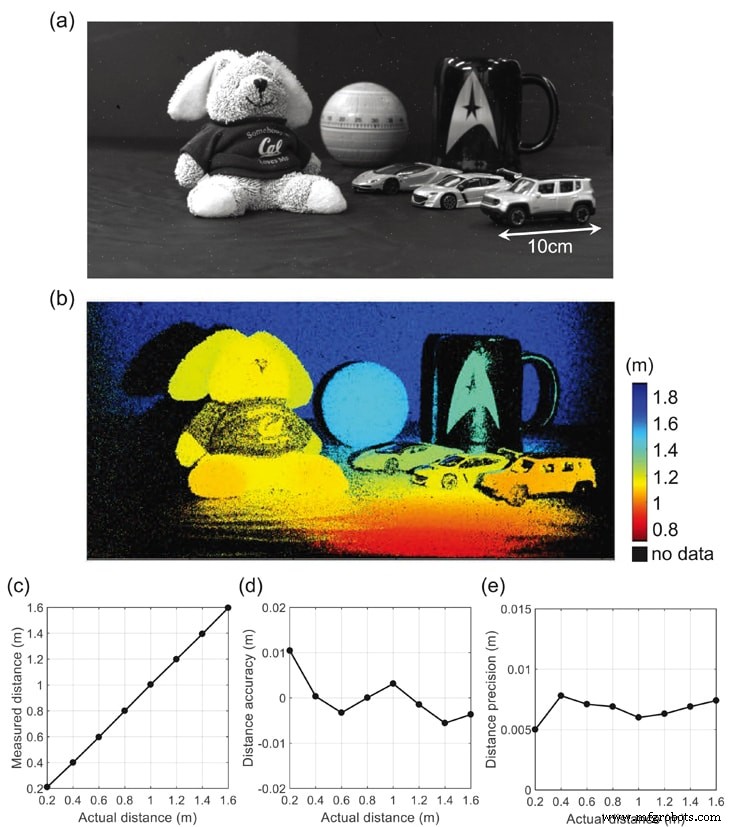
Figuur 3(c) toont de gemeten afstand als functie van de werkelijke objectafstand. In figuur 3(c), (d) en (e) wordt een plat object bedekt met wit papier (reflectie rond 60%) gebruikt om de gemeten afstand, nauwkeurigheid en precisie te evalueren. In figuur 3(c) wordt de gemeten afstand geëxtraheerd door het gemiddelde te nemen van de enkele pixelafstand over 20×20 pixels in het midden van de array. Binnen het meetbereik van 0,2 tot 1,6 m wordt een zeer goede overeenkomst met de werkelijke afstand waargenomen. In figuur 3(d) wordt de afstandsnauwkeurigheid berekend als de gemiddelde gemeten afstand afgetrokken van de werkelijke afstand. Voor het gemeten afstandsbereik is de nauwkeurigheid altijd beter dan 1 cm. In figuur 3(e) wordt de afstandsnauwkeurigheid benut als een standaarddeviatie van de enkele pixelafstand over 20×20 pixels in het midden van de array. De precisie is beter dan 7,8 mm (rms) voor alle gemeten punten tot 1,6 m.
Detectie van meerdere objecten is experimenteel aangetoond door het coderen van tijdelijke verlichting of belichtingspatronen, wat hoge rekenkosten met zich meebrengt om 3D-beelden te herstellen. Een time-gated time-of-flight-sensor biedt een alternatieve, schaalbare oplossing door middel van compacte pixelschakelingen en minder gecompliceerde berekeningen.
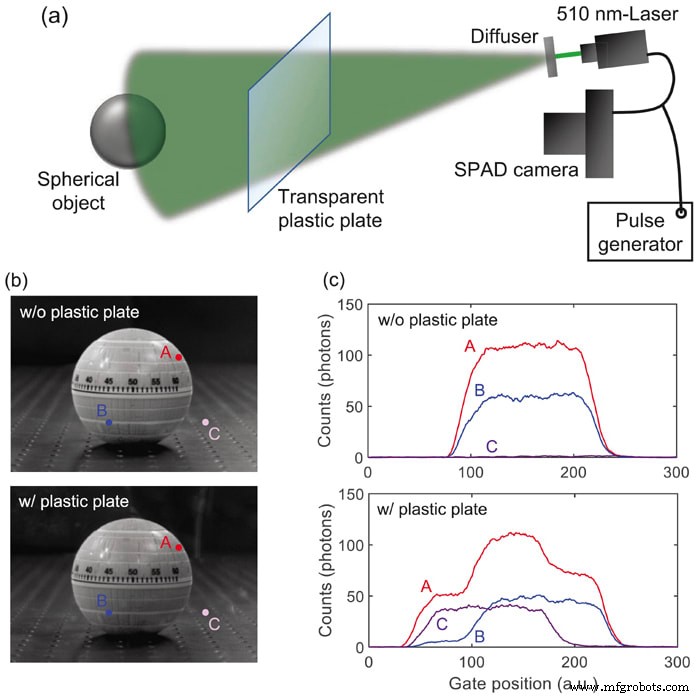
Figuur 4(a) toont de experimentele opstelling:510 nm laserstraal gepulseerd op 40 MHz wordt verspreid door een diffusor en gebruikt om een bolvormig doel te verlichten. De SPAD-camera wordt gesynchroniseerd met het lasertriggersignaal en er wordt een transparante plastic plaat tussen de camera en het object geplaatst. De afstanden van de camera tot de plastic plaat en het object zijn respectievelijk 0,45 m en 0,75 m. Figuur 4 (b) toont 2D-intensiteitsbeelden onder binnenverlichting met en zonder geplaatste plastic plaat. Omdat de plaat bijna transparant is, wordt er geen significant verschil waargenomen in de 2D-beelden voor die twee gevallen.
De gemeten time-gating profielen voor drie representatieve punten (A, B en C) zijn uitgezet in figuur 4(c). Zonder de plaat tonen de tijdpoortprofielen voor punt A en B slechts een enkele afgevlakte rechthoekige functiegolfvorm met zijn stijgende rand rond poortpositie 100 (één stap van de positie corresponderend met 36 ps). Voor punt C blijft het aantal fotonen bijna nul over het gemeten poortpositiebereik, wat aangeeft dat er bij deze pixel geen reflecterend object wordt gedetecteerd.
Met de plastic plaat daarentegen vertoont het profiel op punt A tweestaps stijgende randen rond poortposities 40 en 100. Aangezien het gemeten profiel van fotonentellingen een convolutie is van een enkele afgevlakte rechthoekige functie en de gereflecteerde fotonintensiteitsverdeling, het tweestapsprofiel is een overtuigend bewijs van dubbele reflectie van de plastic plaat en het bolvormige object. Vergelijkbaar gedrag wordt waargenomen bij punt B, waar de helling van de eerste opgaande flank rond poortpositie 40 milder is dan die van punt A. Het profiel op punt C vertoont slechts een enkele opgaande flank rond poortpositie 40, wat overeenkomt met de reflectie van het plastic bord. De variatie van de helling voor de opgaande rand rond poortpositie 40 tussen verschillende punten wordt veroorzaakt door de niet-uniforme reflectie van het oppervlak van de plastic plaat.
De resultaten demonstreren het vermogen van een tijdgestuurde SPAD-camera om ruimtelijk overlappende detectie van meerdere objecten uit te voeren. Merk op dat het voorgestelde schema kan worden toegepast op de detectie van meer dan twee reflectiepieken. Fijner scannen van het virtuele poortvenster in postprocessing maakt systematische detectie van meerdere pieken mogelijk. De minimaal oplosbare afstand tussen twee aangrenzende reflecterende materialen wordt fundamenteel beperkt door de eindige stijg- of daaltijd van het poortraamprofiel, overeenkomend met 5-10 cm in deze SPAD-sensor.
Concluderend is er voor het eerst melding gemaakt van een 1-Mpixel time-gated SPAD-beeldsensor. In SPAD-onderzoek wordt het bereiken van een megapixel SPAD-sensor al meer dan tien jaar beschouwd als een van de belangrijkste mijlpalen. De sensor wordt toegepast op 2D-beeldvorming met hoog dynamisch bereik en 3D-beeldvorming met hoge ruimte-tijdresolutie. Voor zover wij weten, is de ruimtelijk overlappende detectie van meerdere objecten met een enkel foton time-gating-schema voor het eerst experimenteel aangetoond.
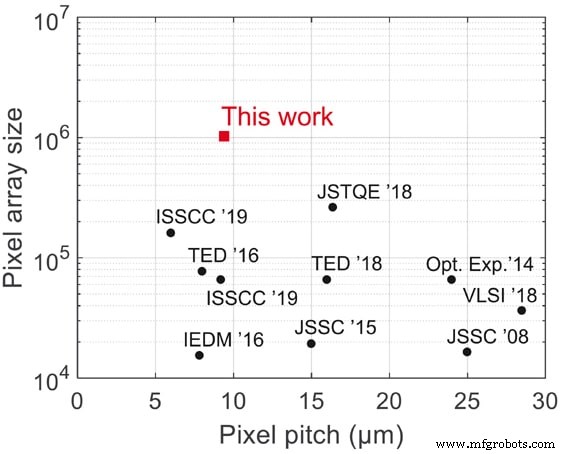
Figuur 5 toont een state-of-the-art vergelijking van SPAD-pixelpitch en arraygrootte. De arraygrootte van de sensor is de grootste, bijna 4 keer hoger dan die van de state-of-the-art sensor, terwijl de pixelpitch een van de kleinste is. Dankzij de hoge resolutie 2D- en 3D-beeldvormingsmogelijkheden zal de voorgestelde sensor nuttig zijn in een breed scala aan industriële toepassingen, zoals beveiliging, auto's, robotica, biomedische en wetenschappelijke toepassingen, waaronder kwantumbeeldvorming en ultrasnelle beeldvorming.
Lees een volledig rapport over de technologie van het wetenschappelijke tijdschrift Optica .
Dit artikel is geschreven door Edoardo Charbon, professor, EPFL Zwitserland (Lausanne, Zwitserland). Voor meer informatie, bezoek hier .
Sensor
- Camera
- Investeringen in productietechnologie - postpandemie
- BrickPi Bookreader
- Lineaire bewegingstechnologie
- Multi-shot lensloze camera
- High-definition millimetergolf bodyscanner
- 2021 Leveranciersgids:Sensoren
- Pyro-elektrische Sandwich Thermal Energy Harvester
- Plenoptische camera
- Nanosensor-array met e-tong
- printplaat 101