


Inzicht in de golflengtekeuze in LiDAR-systemen
Het wordt algemeen erkend dat geavanceerde rijhulpsystemen (ADAS) en autonoom rijden (AD) succesvol kunnen zijn als de omgeving van het voertuig effectief wordt gedetecteerd in de algoritmen die autonome navigatie mogelijk maken. Gezien de absolute afhankelijkheid van detectie in levenskritieke situaties, worden meerdere sensormodaliteiten gebruikt waarbij de gegevens worden samengevoegd om elkaar te versterken en redundantie te bieden. Hierdoor kan elke technologie zijn sterke punten benutten en een beter gecombineerde oplossing leveren.
De drie modaliteiten die in de toekomst prominent zullen worden gebruikt voor de sensor die in voertuigen voor ADAS en AD wordt gebruikt, zijn beeldsensoren, radar en LiDAR (Light Detection and Ranging). Elk van deze sensoren heeft zijn eigen sterke punten en samen kunnen ze een complete sensorsuite vormen die gegevens levert om de autonome waarnemingsalgoritmen in staat te stellen beslissingen te nemen met sensorfusie - de mogelijkheid om kleur, intensiteit, snelheid en diepte te bieden voor elk punt of elke kern in de scène.
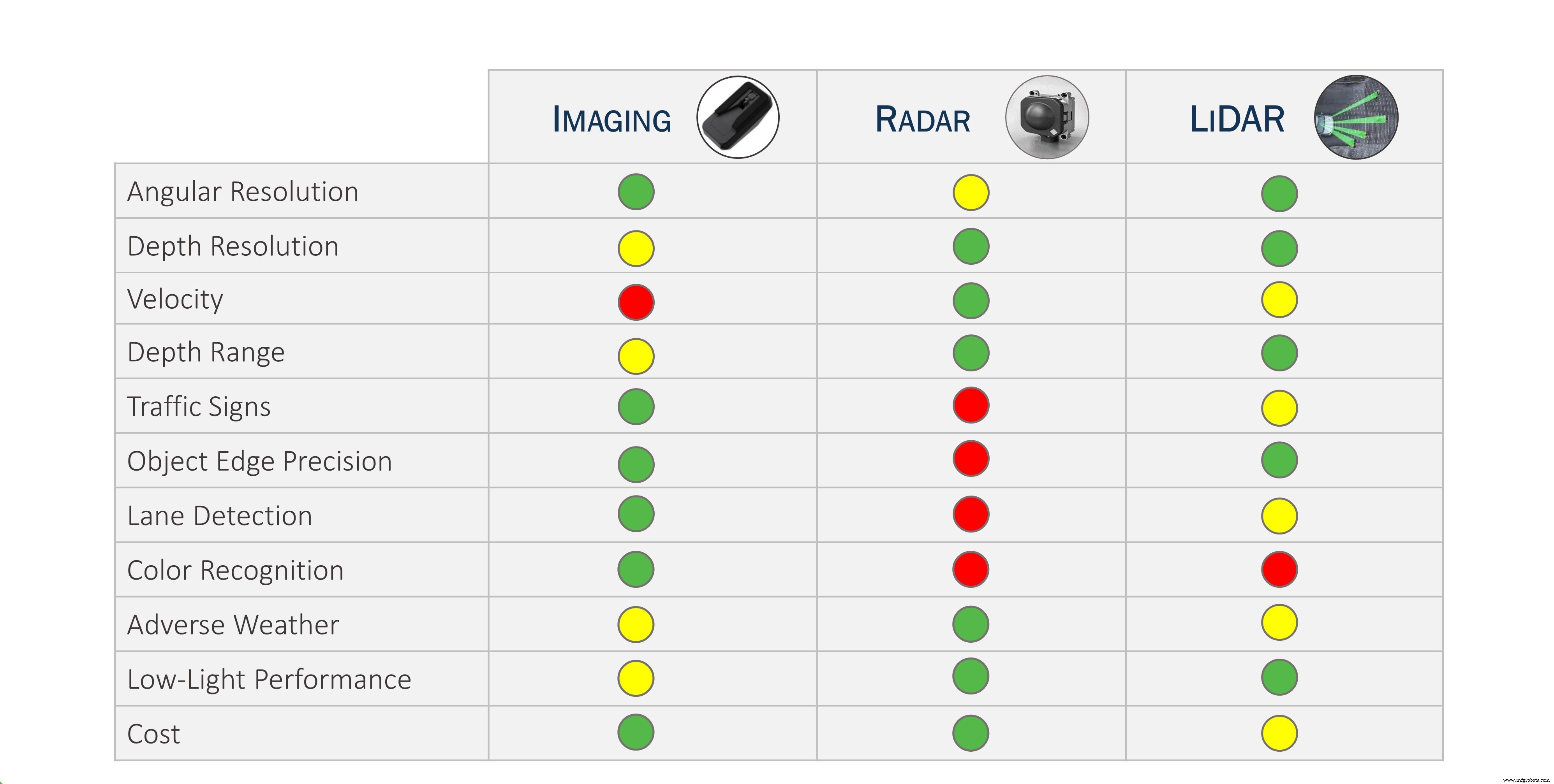
Afbeelding 1:Sensorfusie maakt gebruik van de sterke punten van elke modaliteit om volledige informatie over de omgeving van het voertuig te bieden.
Van deze drie belangrijkste modaliteiten is LiDAR de meest ontluikende technologie die wordt gecommercialiseerd voor gebruik op de massamarkt, hoewel het concept om licht te gebruiken om afstand te meten al tientallen jaren teruggaat. De markt voor automotive LiDAR zal volgens Yole Développement een spectaculaire groei laten zien van $ 39 miljoen in 2020 tot een verwachte $ 1,75 miljard in 2025, aangedreven door de toename van autonome systemen die de volledige sensorsuite vereisen. De kans is zo groot dat er meer dan 100 bedrijven zijn die aan LiDAR-technologie werken, met cumulatieve investeringen in deze bedrijven van meer dan $ 1,5 miljard dollar in 2020 - en dit was vóór de stortvloed van door SPAC gestuurde beursintroducties door meer dan een handvol van LiDAR-bedrijven die eind 2020 zijn begonnen. Maar wanneer er zoveel bedrijven werken aan één enkele technologie - waarvan sommige fundamenteel anders zijn, zoals de golflengte van het licht dat wordt gebruikt (prominente voorbeelden zijn 905nm en 1550nm) - is het onvermijdelijk dat er een winnende technologie en consolidatie zijn, zoals keer op keer is gezien, of het nu Ethernet was voor netwerken of VHS voor video.
Als je kijkt naar de gebruikers van LiDAR-technologie - de autofabrikanten, samen met de bedrijven die autonome robotvoertuigen ontwerpen en bouwen voor het vervoer van mensen en goederen - is het belangrijkste in hun gedachten hun vereisten. Uiteindelijk willen deze bedrijven dat leveranciers hen LiDAR-sensoren leveren die goedkoop en met een hoge mate van betrouwbaarheid zijn, terwijl ze voldoen aan de prestatiespecificaties van het bereik en de detectie van objecten met een lage reflectie. Hoewel alle ingenieurs een uitgesproken mening hebben, zullen deze bedrijven waarschijnlijk agnostisch zijn ten aanzien van de implementatie van de technologie als de leverancier tegen de juiste kosten aan de prestatie- en betrouwbaarheidseisen kan voldoen. En dat leidt tot het fundamentele debat dat dit artikel wil helpen oplossen:welke golflengte zal de overhand hebben voor LiDAR-toepassingen in de auto-industrie?
LiDAR-overzicht
Om deze vraag te beantwoorden, is het noodzakelijk om de anatomie van een LiDAR-systeem te begrijpen, waarvan er verschillende architecturen zijn. Coherente LiDAR, een type dat frequentiegemoduleerde continue golf (FMCW) wordt genoemd, mengt een uitgezonden lasersignaal met gereflecteerd licht om het bereik en de snelheid van objecten te berekenen. FMCW biedt enkele voordelen, maar het blijft relatief ongebruikelijk in vergelijking met de meest gebruikelijke LiDAR-aanpak, directe time-of-flight (dToF) LiDAR. Deze implementatie meet de afstand tot een object door te timen hoe lang het duurt voordat een zeer korte lichtpuls die wordt uitgezonden door een verlichtingsbron wordt gereflecteerd door een object en wordt teruggestuurd om te worden gedetecteerd door de sensor. Het gebruikt de lichtsnelheid om direct bereken de afstand tot het object met behulp van de eenvoudige wiskundige formule met betrekking tot tijd, snelheid en afstand. Een typisch dToF LiDAR-systeem heeft zes belangrijke hardwarefuncties, hoewel de keuze van de golflengte vooral van invloed is op de zend- en ontvangstfuncties.
klik voor afbeelding op volledige grootte
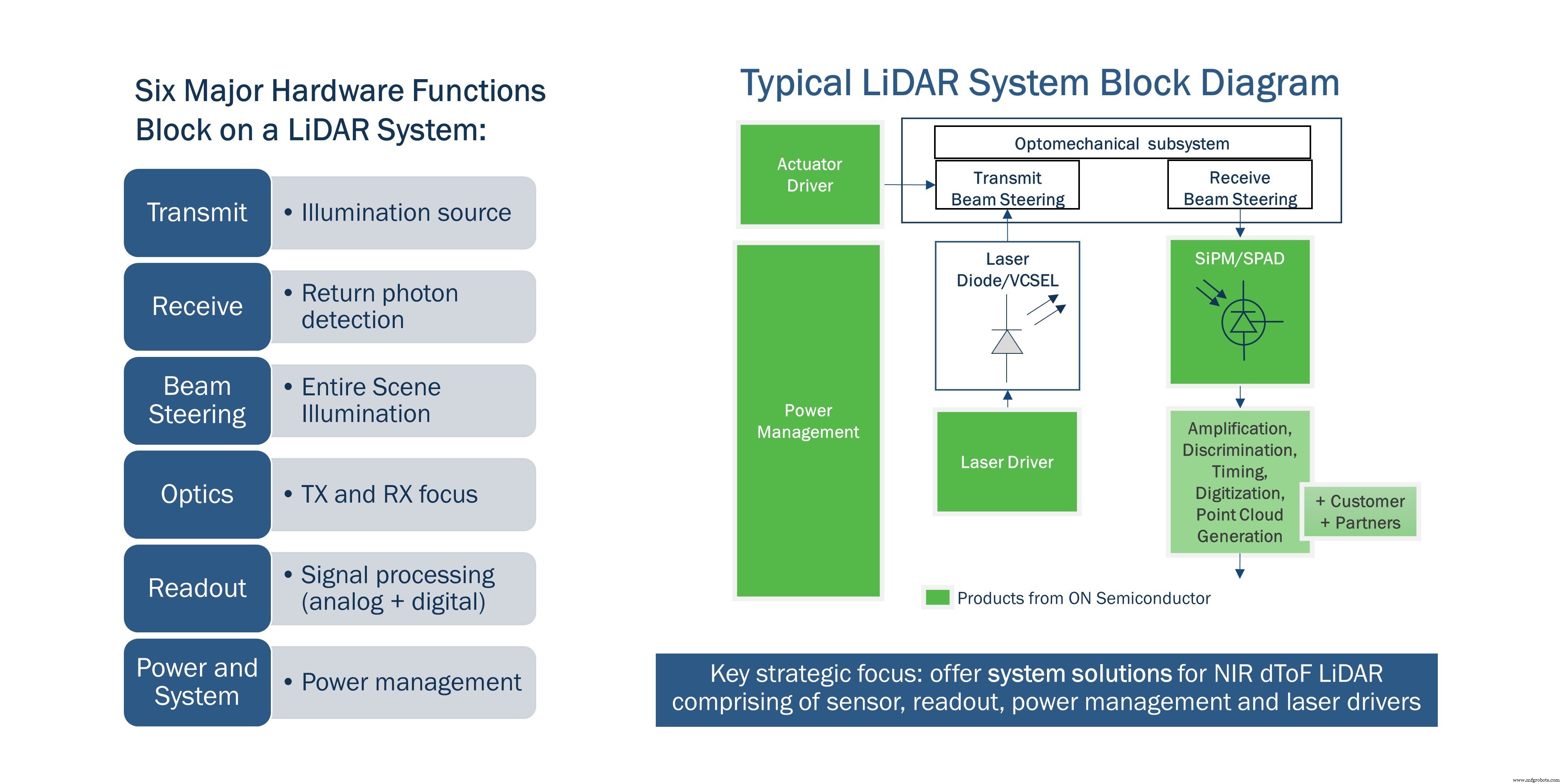
Figuur 2:Een blokschema van een typisch dToF-systeem met groene gedeelten die enkele aandachtsgebieden van ON Semiconductor-producten vertegenwoordigen.
Tabel 1 toont een lijst van de verschillende LiDAR-fabrikanten, variërend van bekende automotive Tier-1's tot startups in alle regio's van de wereld. Op basis van marktrapporten en openbare informatie gebruikt de overgrote meerderheid van deze bedrijven hun LiDAR's op nabij-infrarood (NIR) golflengten, in tegenstelling tot kortegolf-infrarood (SWIR) golflengten. Bovendien, terwijl de SWIR-gerichte leveranciers die aan FMCW werken, beperkt zijn tot die golflengten, hebben de meeste van degenen met een directe time-of-flight-implementatie een manier om een systeem te maken met NIR-golflengten, als ze daarvoor kiezen, terwijl ze in staat zijn om gebruik te maken van een veel van hun bestaande IP rond functies zoals beam-steering en signaalverwerking.
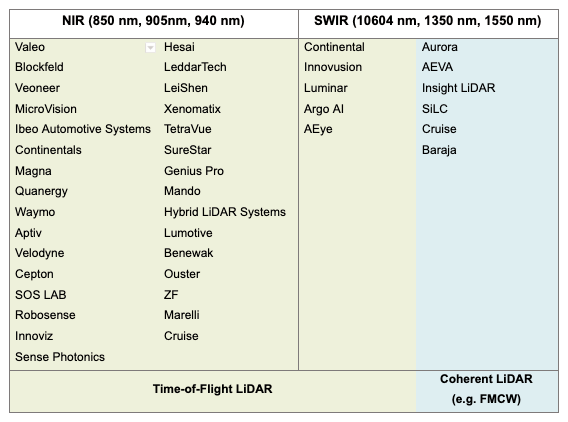
Tabel 1:Lijst van LiDAR-fabrikanten die werken in NIR- en SWIR-golflengten. Geen uitgebreide lijst. (Bron afbeelding:Yole, IHS Markit en openbare onthullingen)
Aangezien de meerderheid, maar niet alle, van deze fabrikanten NIR-golflengten hebben gekozen, moet worden overwogen hoe ze tot deze beslissing zijn gekomen en wat de implicaties zijn. De kern van de discussie is een aantal basisfysica gerelateerd aan de eigenschappen van licht en halfgeleidermaterialen die de componenten vormen die in LiDAR worden gebruikt.
Fotonen die worden afgevuurd door de laser in een LiDAR-systeem, die bedoeld zijn om door objecten te worden teruggekaatst en door de detector te worden ontvangen, moeten concurreren met omgevingsfotonen die van de zon komen. Kijkend naar het spectrum van zonnestraling en rekening houdend met atmosferische absorptie, zijn er "dips" in de bestraling bij bepaalde golflengten die de hoeveelheid fotonen die als ruis voor het systeem bestaat, zouden verminderen. Bij 905 nm is de hoeveelheid zonnestraling ongeveer 3x hoger dan bij 1550 nm, wat betekent dat een NIR-systeem te maken heeft met meer ruis die de sensor kan storen. Maar dit is slechts een van de factoren waarmee rekening moet worden gehouden bij het kiezen van een golflengte voor een LiDAR-systeem.
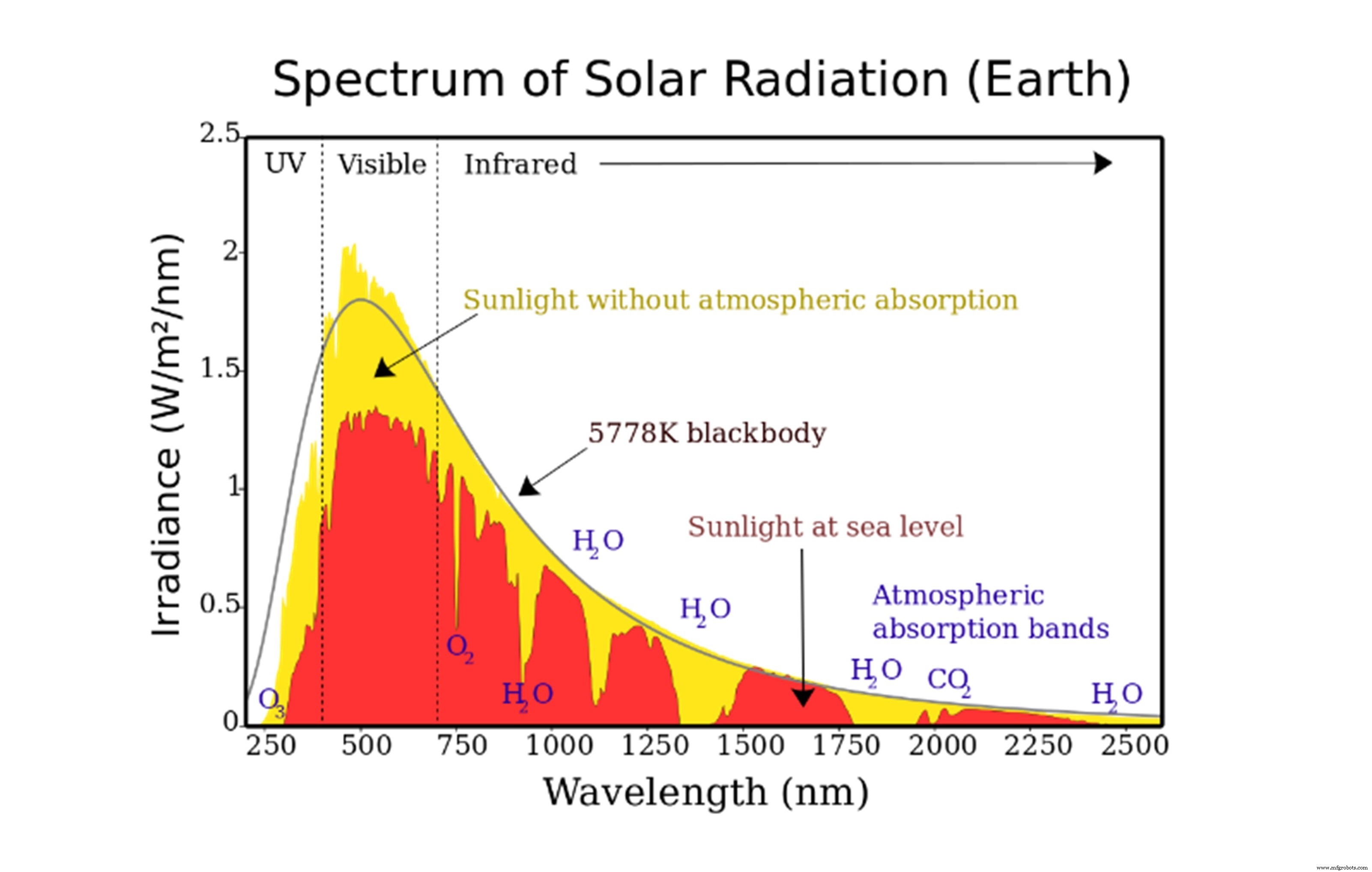
Figuur 3:Atmosferische absorptie van licht resulteert in duidelijke pieken.
Sensoren
De componenten die verantwoordelijk zijn voor het detecteren van de fotonen in het LiDAR-systeem zijn verschillende soorten fotodetectoren, dus het is belangrijk om uit te leggen waarom ze kunnen bestaan uit verschillende halfgeleidermaterialen, afhankelijk van de te detecteren golflengte. In een halfgeleider scheidt een bandgap de valentie- en geleidingsbanden. Fotonen leveren de energie om elektronen te helpen die bandkloof te overwinnen en de halfgeleider geleidend te maken, waardoor een fotostroom ontstaat. De energie van elk foton is gerelateerd aan zijn golflengte en de bandafstand van een halfgeleider is gerelateerd aan zijn gevoeligheid - daarom zijn verschillende halfgeleidermaterialen nodig, afhankelijk van de golflengte van het te detecteren licht. Silicium, de meest voorkomende en goedkoopste halfgeleider om te vervaardigen, reageert op zichtbare en NIR-golflengten tot ongeveer 1000 nm. Om golflengten te detecteren die verder gaan dan die in het SWIR-bereik, kunnen meer exotische groep III/V-halfgeleiders worden gelegeerd om materialen zoals InGaAs in staat te stellen die golflengten van licht te detecteren, van 1000 nm tot 2500 nm.
Vroege LiDAR's gebruikten PIN-fotodiodes als sensoren. PIN-fotodiodes hebben geen inherente versterking en zijn daardoor niet in staat om zwakke signalen gemakkelijk te detecteren. Lawinefotodiodes (APD's) zijn het meest prominente type sensor dat tegenwoordig in LiDAR wordt gebruikt en bieden een matige hoeveelheid versterking. APD's moeten echter ook in lineaire modus werken, zoals PIN-fotodiodes om het signaal van fotonaankomsten te integreren en hebben ook last van een slechte uniformiteit van deel tot deel, terwijl ze zeer hoge voorspanningen vereisen. De nieuwste typen sensoren die steeds vaker in LiDAR's worden gebruikt, zijn gebouwd op single photon lawine diodes (SPAD's), die een zeer grote versterking hebben en in staat zijn om een meetbare stroomoutput te produceren van elk gedetecteerd foton. Silicium-fotomultipliers (SiPM's) zijn arrays van op silicium gebaseerde SPAD's die het extra voordeel hebben dat ze afzonderlijke fotonen kunnen onderscheiden van meerdere fotonen door te kijken naar de amplitude van het gegenereerde signaal.
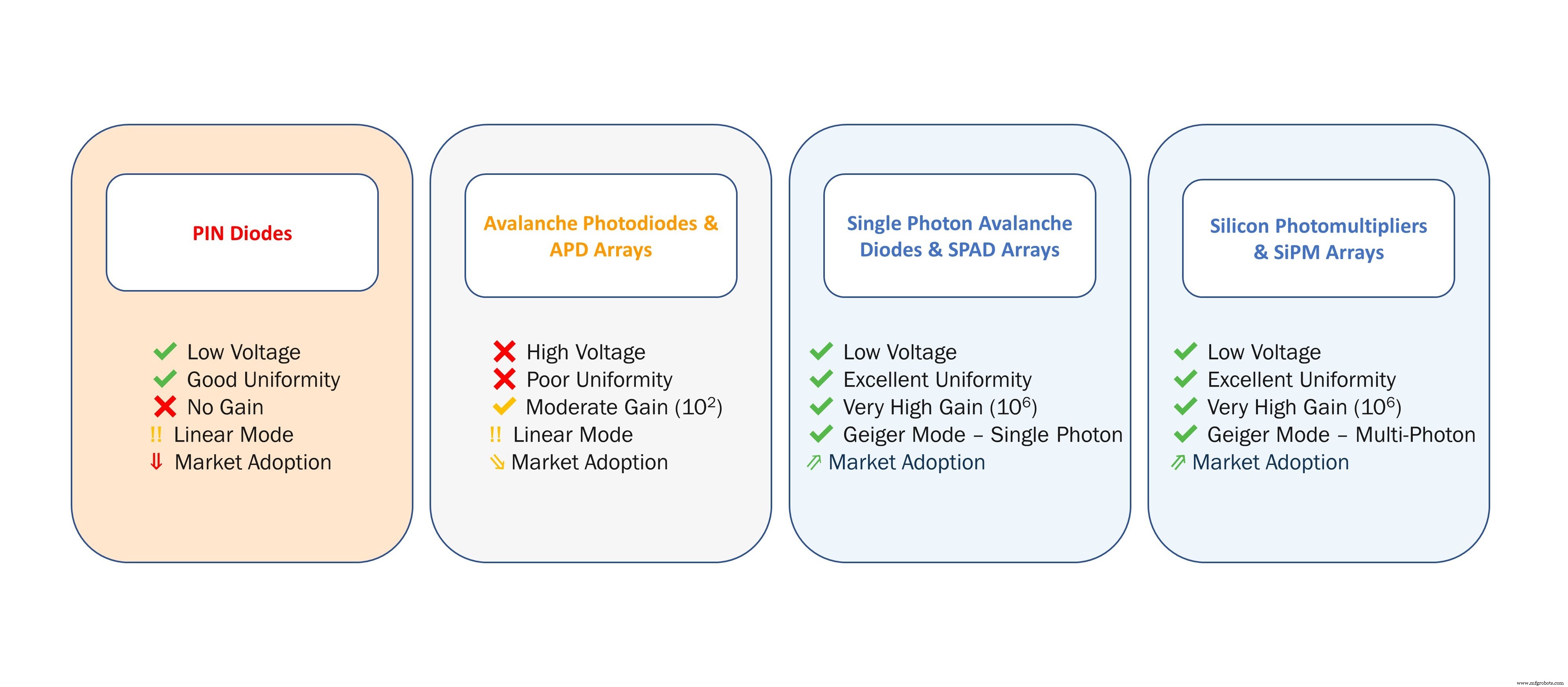
Figuur 4:Verschillende soorten fotodetectoren die worden gebruikt om signalen in een LiDAR te detecteren
Terugkerend naar de relevantie voor het onderwerp golflengten:al deze soorten fotodetectoren kunnen worden gebouwd op silicium (voor NIR-detectie) of III/V-halfgeleiders (voor SWIR-detectie). Aan de andere kant zijn maakbaarheid en kosten de sleutel tot de levensvatbaarheid van de technologie, en CMOS-siliciumgieterijen maken grootschalige en goedkope productie van dergelijke sensoren mogelijk. Dit is een primaire reden waarom SiPM's steeds vaker worden gebruikt voor LiDAR, naast hogere prestaties. Hoewel er APD's en SPAD's voor SWIR bestaan, is het moeilijk om ze te integreren met uitleeslogica omdat de processen niet op silicium zijn gebaseerd. Ten slotte zijn op III/V gebaseerde SPAD-arrays en fotomultiplicatoren (analoog aan SiPM's) voor SWIR nog niet gecommercialiseerd, dus de beschikbaarheid van het ecosysteem bevordert de NIR-golflengten.
Lasers
Het genereren van fotonen is een heel ander proces. Een halfgeleider pn-overgang als versterkingsmedium kan worden gebruikt om een laser te maken; dit wordt gedaan door een stroom door de junctie te pompen die de resonante emissie van fotonen veroorzaakt wanneer atomen naar lagere energiebanden gaan, wat resulteert in een coherente laserstraaluitvoer. Halfgeleiderlasers zijn gebaseerd op directe bandgapmaterialen zoals GaAs en InP, die efficiënt zijn voor het genereren van fotonen die plaatsvinden wanneer atomen naar een lagere energieband gaan, in tegenstelling tot indirecte bandgapmaterialen zoals silicium.
Er zijn twee hoofdtypen lasers die in LiDAR worden gebruikt:edge-emitting laser (EEL) en verticale holte-oppervlakte-emitting laser (VCSEL). EEL's worden tegenwoordig op grotere schaal gebruikt, vanwege hun lagere kosten en hogere output-efficiëntie dan VCSEL's. Ze zijn moeilijker te verpakken en in arrays in te bouwen en hebben ook last van een golflengteverschuiving over de temperatuur, waardoor de detectoren moeten zoeken naar een bredere band van fotongolflengten, waardoor meer omgevingsfotonen als ruis ook kunnen worden gedetecteerd. Ondanks de hogere kosten en lagere energie-efficiëntie, heeft de nieuwere VCSEL-technologie het voordeel van een gemakkelijke en efficiënte verpakking, aangezien de straal van bovenaf wordt gegenereerd. De marktacceptatie van VCSEL neemt toe omdat de kosten aanzienlijk zullen blijven dalen en de energie-efficiëntie zal verbeteren. EEL's en VCSEL's bestaan voor zowel NIR- als SWIR-golflengtegeneratie, met een belangrijk verschil:NIR-golflengten kunnen worden gegenereerd met GaAs, terwijl SWIR-golflengten het gebruik van InGaAsP vereisen. GaAs-lasers kunnen grotere gieterijen met wafelgrootte gebruiken, wat leidt tot lagere kosten, wat opnieuw een voordeel is voor het ecosysteem van NIR LiDAR-fabrikanten, zowel vanuit het oogpunt van kosten als vanuit het oogpunt van beveiliging van de toeleveringsketen.
klik voor afbeelding op volledige grootte
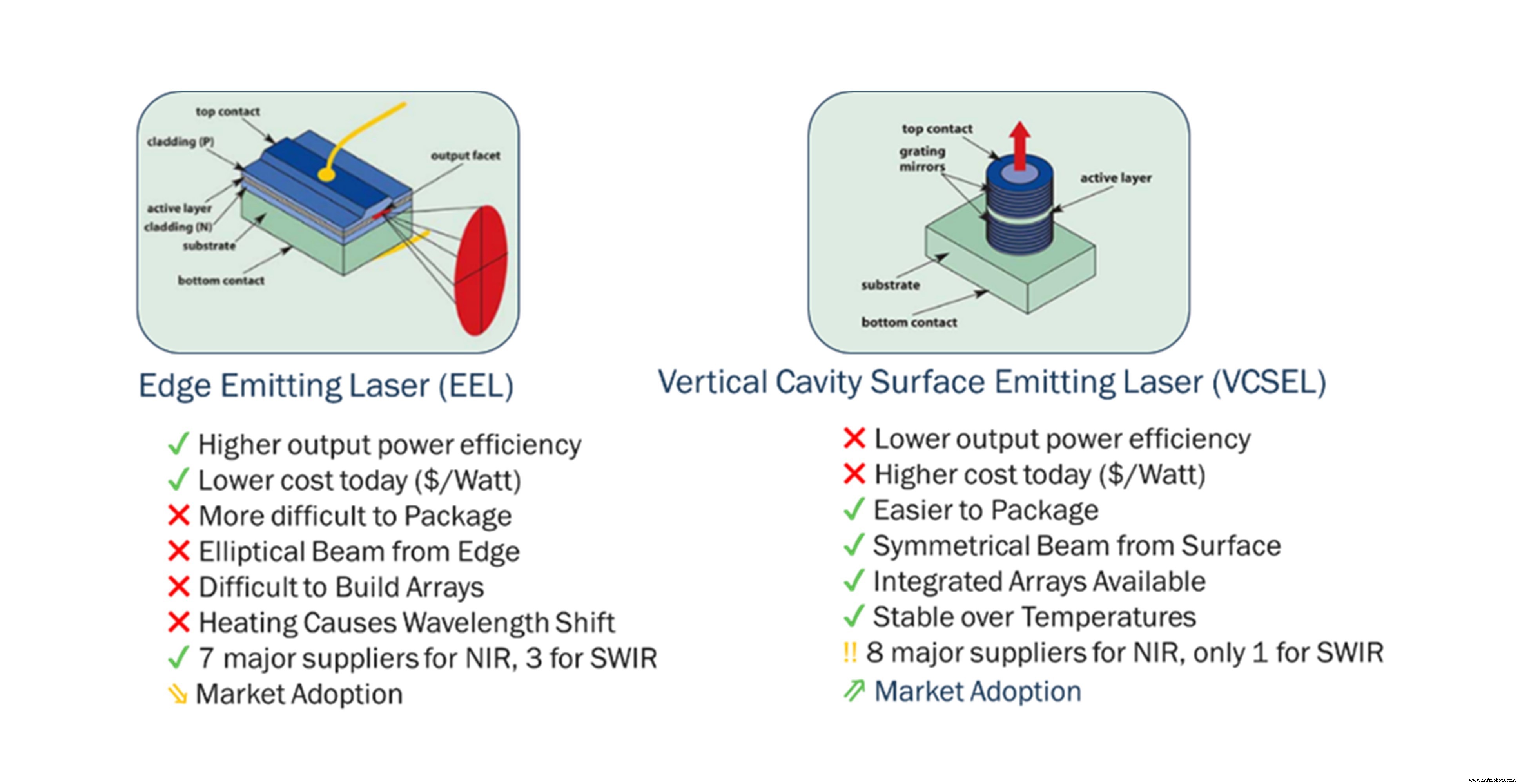
Figuur 5:Verschillende soorten lasers die in een LiDAR worden gebruikt.
Laserkracht en oogveiligheid
Terwijl we het hebben over het golflengtedebat, is het absoluut noodzakelijk om de oogveiligheidsimplicaties van een LiDAR-systeem in overweging te nemen. Het concept van dToF LiDAR omvat het gebruik van korte laserpulsen met een hoog piekvermogen over een bepaalde gezichtshoek die naar de scène worden uitgezonden. Een voetganger die in het pad van het emissiepad van een LiDAR staat, moet er zeker van zijn dat hun ogen niet worden beschadigd door een laser die in hun richting wordt afgevuurd, en IEC-60825 is een specificatie die bepaalt hoeveel de maximaal toelaatbare blootstelling is over de verschillende golflengten van licht. Terwijl NIR-licht, vergelijkbaar met zichtbaar licht, door het hoornvlies kan gaan en het netvlies in het menselijk oog kan bereiken, wordt SWIR-licht meestal geabsorbeerd in het hoornvlies en kan daardoor op hogere niveaus worden belicht.
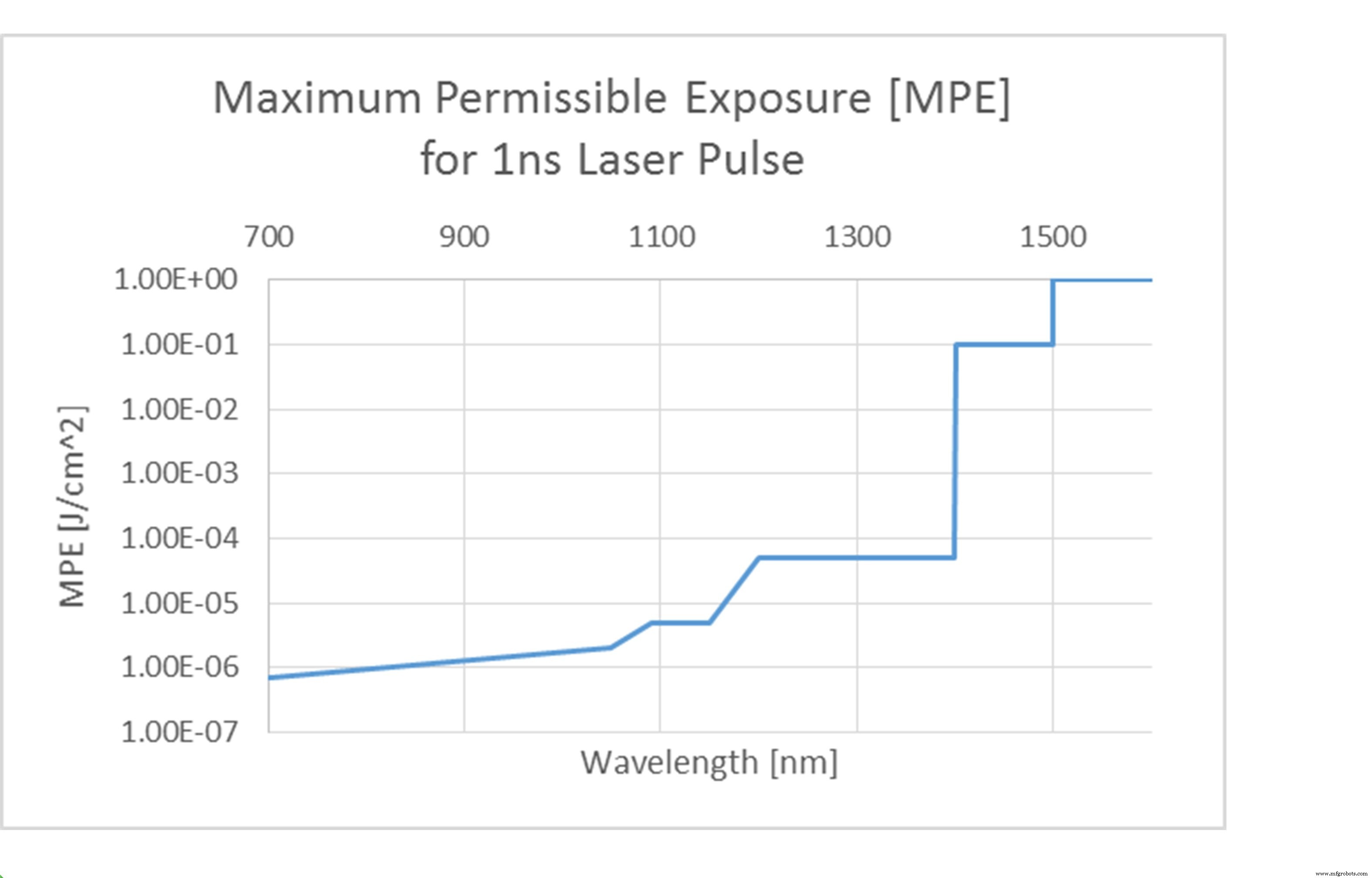
Afbeelding 6:IEC-60825-specificatie voor oogveilige laserbelichting.
In staat zijn om meerdere orden van grootte hoger laservermogen uit te voeren is een voordeel voor een 1550nm-gebaseerd systeem vanuit een prestatieperspectief, omdat hierdoor meer fotonen kunnen worden verzonden en dus worden teruggestuurd om te worden gedetecteerd. Hogere laservermogens hebben echter ook een thermische afweging. Opgemerkt moet worden dat een goed oogveilig ontwerp moet worden gemaakt, ongeacht de golflengte, door duidelijk rekening te houden met de energie per puls en de grootte van de laseropening. Met een op 905 nm gebaseerde LiDAR kan het piekvermogen worden verhoogd door een van deze factoren, zoals weergegeven in afbeelding 7.
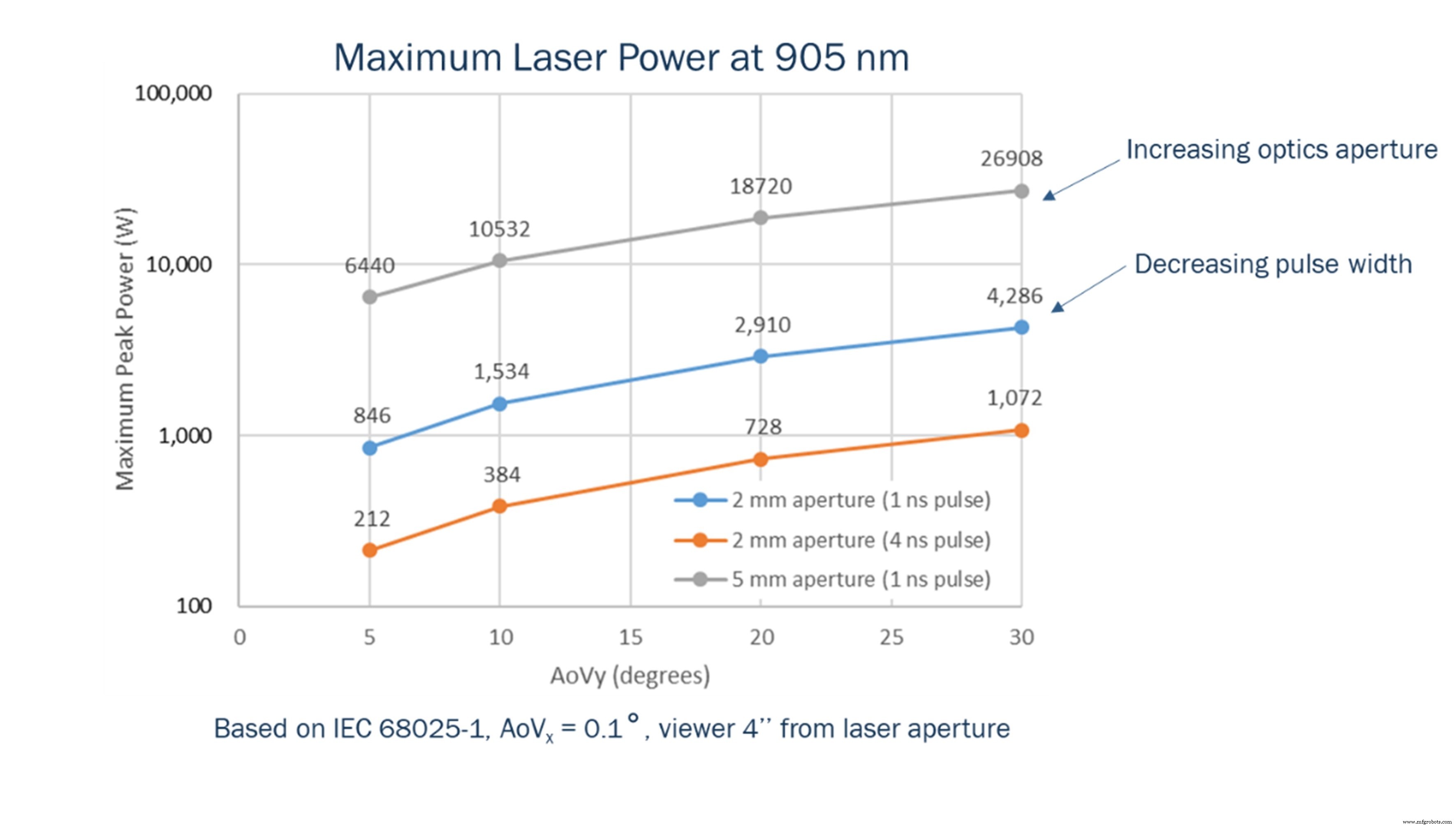
Figuur 7:Oogveilig laserontwerp voor een NIR LiDAR met verschillende optica en laserparameters.
Vergelijking van NIR- en SWIR LiDAR-systemen
De bovenstaande focus op de hoeveelheid laservermogen die kan worden afgegeven, brengt ons terug bij de sensoren die worden gebruikt. Een sensor met hogere prestaties die zwakkere signalen kan detecteren, zal het systeem duidelijk op meerdere manieren ten goede komen:door een groter bereik te bereiken of door minder laservermogen te gebruiken om hetzelfde bereik te bereiken. ON Semiconductor heeft een reeks SiPM's voor NIR LiDAR ontwikkeld die de fotondetectie-efficiëntie (PDE) — een belangrijke parameter die de gevoeligheid aangeeft — naar een marktleidende 18% stuurt met zijn nieuwste sensoren uit de RDM-serie.
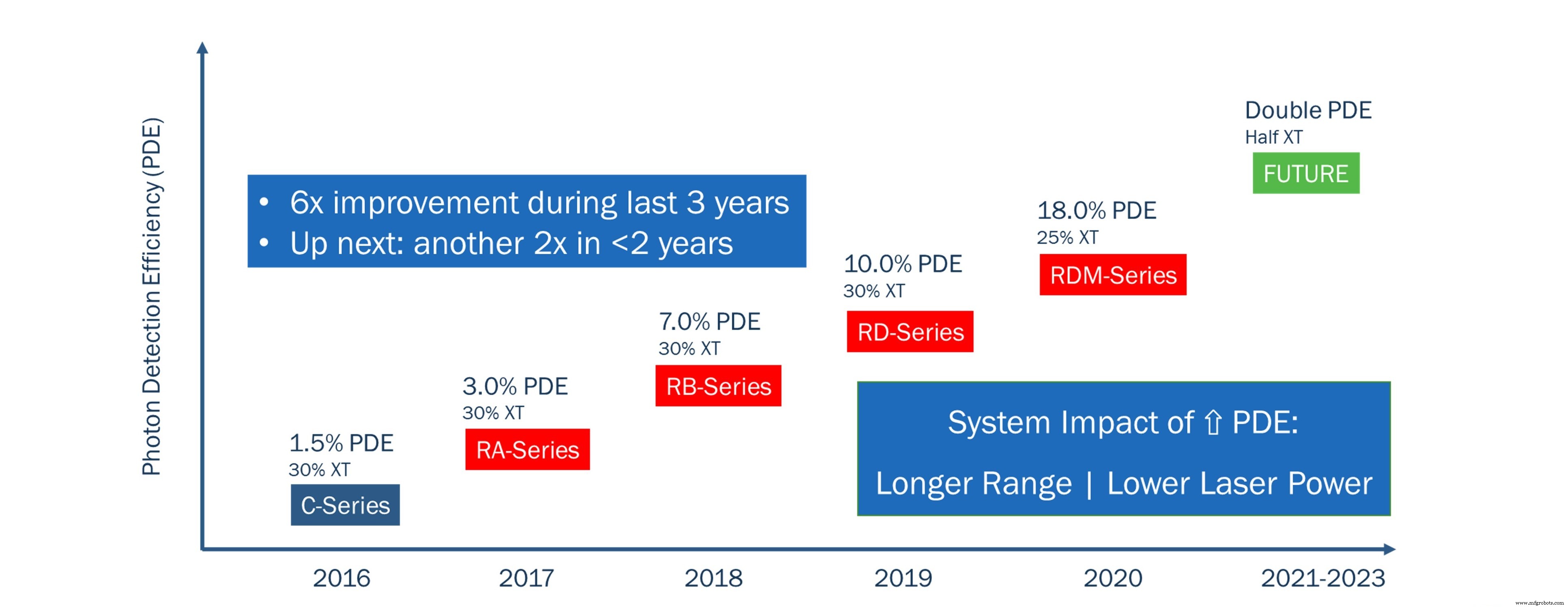
Figuur 8:Procesroutekaart van ON Semiconductor SiPM's.
Om de prestaties van een NIR dToF LiDAR te vergelijken met een SWIR dToF LiDAR, hebben we systeemmodellering uitgevoerd voor identieke LiDAR-architecturen en omgevingsomstandigheden met verschillende parameters voor de lasers en sensoren. De LiDAR-architectuur is een coaxiaal systeem met een 16-kanaals detectorarray en een scanmechanisme om zich over het gezichtsveld te verspreiden, zoals weergegeven in afbeelding 10. Dit systeemmodel is gevalideerd met hardware en stelt ons in staat om de prestaties van LiDAR nauwkeurig in te schatten systemen.
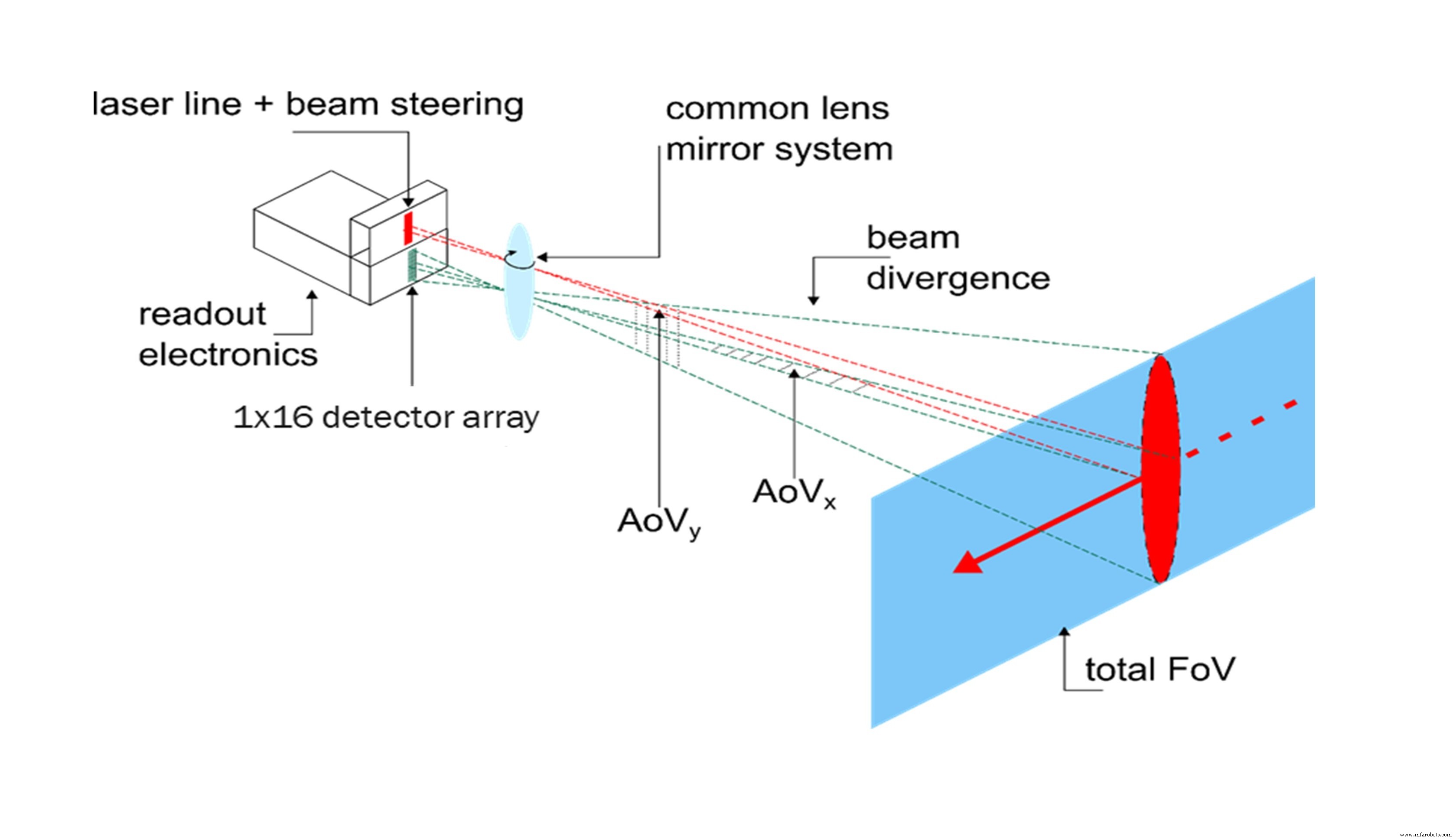
Figuur 9:Systeemmodel voor een dToF LiDAR-sensor.
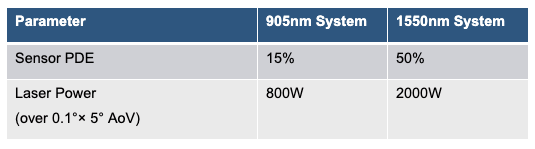
Tabel 2:LiDAR-sensor- en laserparameters voor NIR- en SWIR-systeemmodelsimulatie.
Het 1550nm-systeem gebruikt een hogere hoeveelheid laservermogen, evenals een hogere PDE-sensor vanwege het gebruik van InGaAs-legeringen met hoge PDE, wat betere prestaties zou moeten opleveren in onze systeemsimulatie. Gebruikmakend van parameters op systeemniveau van 100klux omgevingslicht gefilterd door een 50nm bandpass op de sensorlens (respectievelijk gecentreerd rond 905nm en 1550nm), een 0,1° x 5° beeldhoek gescand over 80° horizontaal bij 30 fps, een 500 kHz laserherhalingssnelheid met Een pulsbreedte van 1 ns en een lensdiameter van 22 mm, de resultaten worden weergegeven in afbeelding 10.
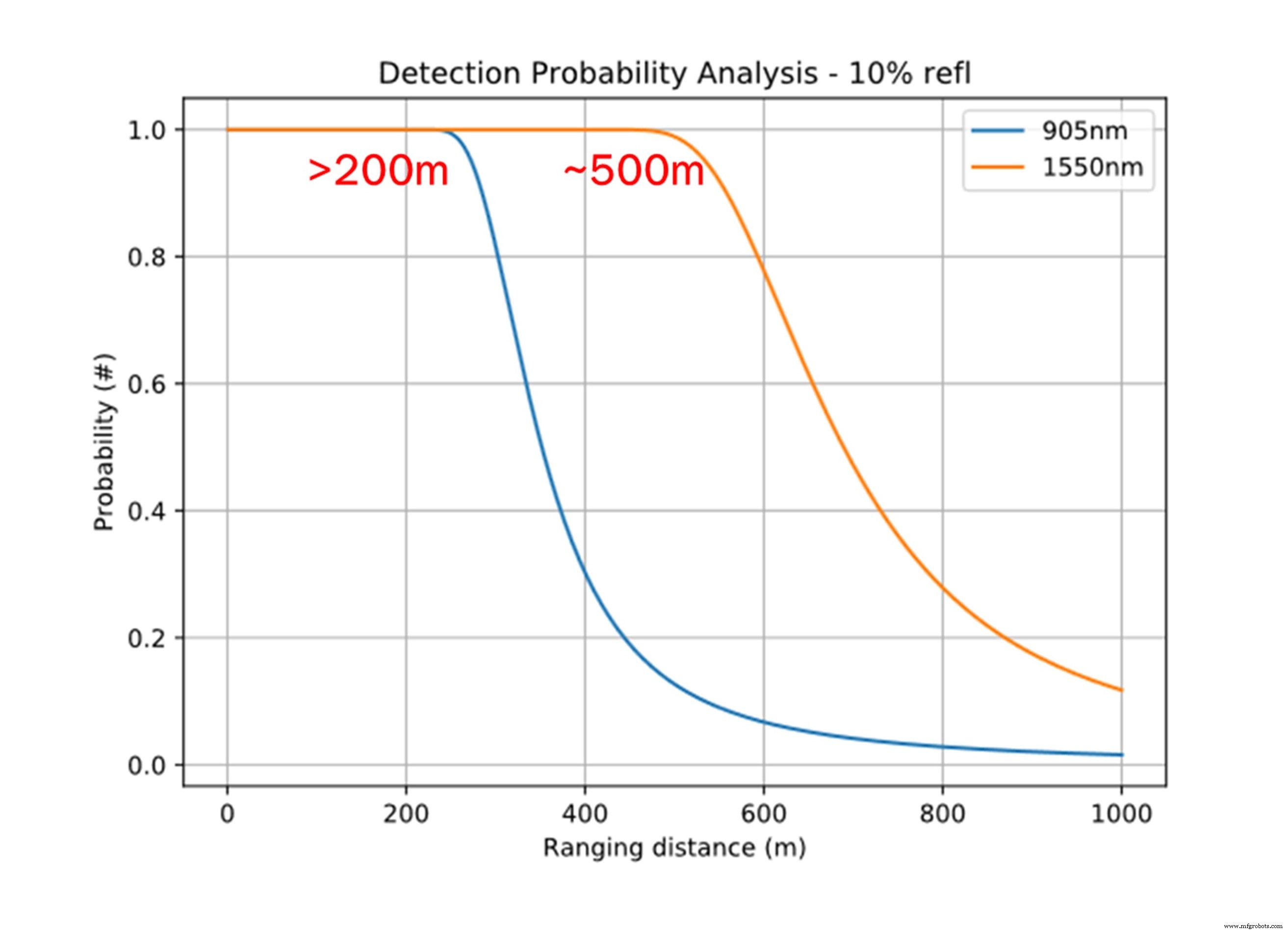
Figuur 10:Simulatieresultaten voor vergelijkbare LiDAR-systemen op basis van 905nm en 1550nm.
Zoals verwacht, kan het 1550nm-systeem verder variëren voor een object met een lage reflectie, tot 500 m met een bereikwaarschijnlijkheid van 99%. Het op 905 nm gebaseerde systeem bereikt echter nog steeds een bereik van meer dan 200 m, wat aantoont dat beide soorten systemen kunnen voldoen aan de LiDAR-vereisten voor auto's met een groot bereik in typische omgevingsomstandigheden. Wanneer slechte omgevingsomstandigheden zoals regen of mist worden geïntroduceerd, zorgen de waterabsorberende eigenschappen van SWIR-licht ervoor dat de prestaties sneller achteruitgaan dan een op NIR gebaseerd systeem, wat een andere factor is om rekening mee te houden.
Kostenoverwegingen
Nadat we uitgebreid hebben gekeken naar de technologie achter LiDAR-systemen en naar de implicaties van het gebruik van verschillende golflengten, gaan we nu terug naar de factor kostenoverwegingen. We hebben eerder uitgelegd dat de sensoren die worden gebruikt voor op NIR gebaseerde LiDAR's afkomstig zijn van native CMOS-siliciumgieterijprocessen, die de laagst mogelijke kosten voor halfgeleiders mogelijk maken. Bovendien maken ze ook integratie van CMOS-uitleeslogica met de sensor in één chip mogelijk door gebruik te maken van gestapelde die-technologie, die tegenwoordig gemakkelijk verkrijgbaar is bij gieterijen, waardoor de signaalketen verder instort en de kosten worden verlaagd. Omgekeerd gebruiken SWIR-sensoren III / V-halfgeleidergieterijen zoals InGaAs, die duurder zijn en nieuwe hybride Ge-Si-technologie - die mogelijk goedkopere SWIR-sensoren mogelijk maakt - waardoor integratie met uitleeslogica eenvoudiger wordt, maar naar schatting nog steeds meer dan 5x duurder is dan traditioneel CMOS-silicium, zelfs na het bereiken van volwassenheid. Aan de laserzijde leidt het verschil in wafelgrootte tussen de GaAs-wafels die worden gebruikt voor het maken van de laserchips in NIR-systemen versus de InGaAs-wafels die worden gebruikt voor het maken van de laserchips in SWIR-systemen opnieuw tot een kostenverschil, en het feit dat NIR-systemen een weg naar het gebruik van VCSEL's met een veel gemakkelijker beschikbare leveranciersbasis maakt ook een goedkopere integratie mogelijk.
De som van bovenstaande factoren leidde tot een analyse uitgevoerd door IHS Markit (Amsrud, 2019), waaruit bleek dat voor hetzelfde type component (de sensor of laser), de kosten voor een SWIR-systeem 10 tot 100 keer hoger zouden zijn dan een NIR-systeem. De gemiddelde gecombineerde kosten van componenten voor de sensor en laser voor een NIR-systeem werden geschat op $ 4 tot $ 20 per kanaal in 2019 en dalen tot $ 2 tot $ 10 in 2025. Daarentegen werden de equivalente gemiddelde componentkosten voor een SWIR-systeem geschat op $ 275 per kanaal zijn in 2019 en afnemen tot $ 155 per kanaal in 2025. Dat is een enorm kostenverschil als je bedenkt dat LiDAR-systemen meerdere kanalen bevatten, zelfs als er een 1D-scanbenadering wordt gebruikt, aangezien een verticale array van kanalen met één punt nog steeds vereist.
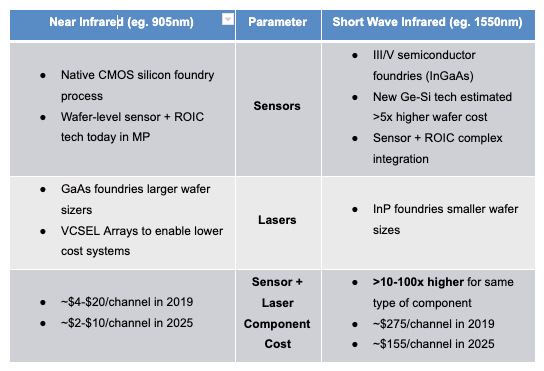
Tabel 3:Overzicht kostenoverwegingen. (Bron afbeelding:IHS Markit)
De LiDAR-marktdynamiek is ook niet gunstig voor het SWIR-kamp. De markt voor autonoom rijden is niet zo snel gegroeid als de marktverwachtingen vijf jaar geleden, en autonome systemen van niveau 4 en niveau 5, waarvoor LiDAR een must is, zijn nog jaren verwijderd van wijdverbreide massale implementatie. Ondertussen zijn de industriële en roboticamarkten die gebruik maken van LiDAR nog kostenbewuster en hebben ze geen behoefte aan de ultrahoge prestatievoordelen van een SWIR-systeem, dus deze fabrikanten hebben in de tussentijd geen manier om componenten kosten omlaag door het volume te verhogen, zoals vaak wordt beweerd. Er is een "kip en het ei"-probleem om de lagere kosten te krijgen wanneer het volume toeneemt, maar de lagere kosten nodig hebben om de volumes te krijgen.
Samenvatting
Na een diepe duik in de technologie en de verschillen tussen NIR- en SWIR-systemen, is het duidelijk waarom de overgrote meerderheid van de huidige LiDAR-systemen NIR-golflengten gebruikt. Hoewel de vooruitzichten voor de toekomst nooit 100% zeker zijn, is het duidelijk dat de kosten en beschikbaarheid van ecosysteemleveranciers sleutelfactoren zijn, en op NIR gebaseerde systemen zullen zeker altijd goedkoper zijn vanwege het technologische voordeel en de schaalvoordelen voor CMOS-silicium. En hoewel SWIR een LiDAR-systeem met een groter bereik mogelijk maakt, kunnen op NIR gebaseerde LiDAR's ook de gewenste langeafstandsvereisten voor auto's bereiken, terwijl ze ook buitengewoon goed presteren voor configuraties op korte tot middellange afstand die ook nodig zijn in ADAS en AD. Het bestaan van op NIR gebaseerde LiDAR's in massaproductie voor de automobielmarkt van vandaag laat zien dat de technologie gecommercialiseerd is en zich heeft bewezen, maar het zal nog enige tijd duren voordat consolidatie plaatsvindt en de winnaars en verliezers eruit worden geschud. Per slot van rekening telde de auto-industrie aan het begin van de 20e eeuw 30 verschillende fabrikanten, en dat nam in de volgende tien jaar toe tot bijna 500 - maar het duurde slechts een paar jaar voordat de meeste van hen verdwenen. De verwachting is dat tegen het einde van dit decennium een vergelijkbare dynamiek kan optreden bij LiDAR-fabrikanten.
Referenties
Yole Développement (2020). LiDAR voor automobiel- en industriële toepassingen – Markt- en technologierapport 2020
Amsrud, P. (25 september 2019). De race naar een goedkoop LIDAR-systeem [Conferentiepresentatie] . Automotive LIDAR 2019, Detroit, MI, Verenigde Staten. IHS Markit.
— Bahman Hadji, directeur bedrijfsontwikkeling, automotive sensing-divisie, ON Semiconductor
>> Dit artikel is oorspronkelijk gepubliceerd op onze zustersite, EE Tijden.
Verwante inhoud:
- ADAS-experts denken na over sensorintegratie in toekomstige voertuigen
- Slimme steden:het pleidooi voor lidar in intelligente transportsystemen
- Wat drijft verandering in elektronische systemen voor auto's
- Time-of-flight-technologie belooft verbeterde nauwkeurigheid
- Waarom FIR-detectietechnologie essentieel is voor het realiseren van volledig autonome voertuigen
Abonneer u voor meer Embedded op de wekelijkse e-mailnieuwsbrief van Embedded.
Sensor
- Hallsensor richt zich op veiligheidskritieke autosystemen
- Open-source slimme landbouwsystemen ontwerpen
- Sensoren begrijpen
- Bimodale "elektronische huid"
- Tijd van de vlucht versus FMCW LiDAR-systemen
- Sensorfilm voor ruimtevaart
- Miniatuur long-hartsensor op een chip
- Vaste stof kooldioxidesensor
- Op koolstof gebaseerde luchtkwaliteitssensor
- Autonome sensortechnologie voor realtime feedback over koeling en verwarming
- Kodiak 3D LiDAR