


Arduino afstotende elektromagnetische levitatie
Componenten en benodigdheden
 |
| × | 1 | |||
 |
| × | 1 | |||
| × | 1 | ||||
| × | 1 | ||||
| |
| × | 1 | |||
| × | 1 |
Benodigde gereedschappen en machines
 |
|
Apps en online services
 |
|
Over dit project
Een paar jaar geleden probeerde ik een apparaat te maken voor afstotende magnetische levitatie, maar alle circuits die ik had waren complex en de instelling was erg moeilijk.
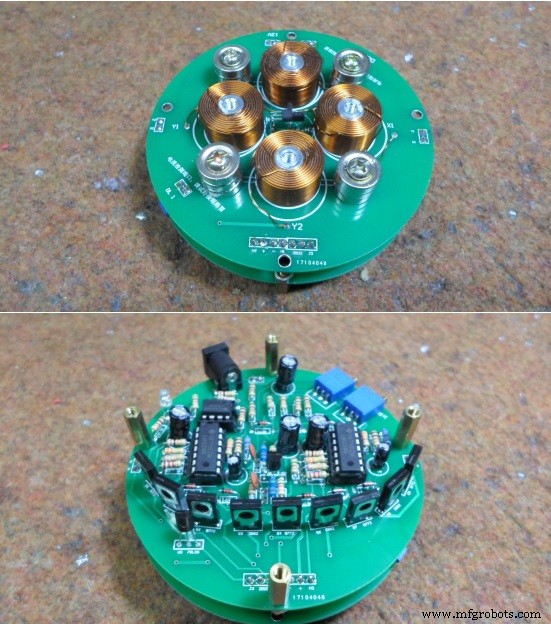
Na verschillende mislukte en semi-succesvolle pogingen heb ik de levitator gekocht die je op de foto kunt zien, maar het is bijna onmogelijk om hem thuis te maken (doe-het-zelf).
Nu zal ik je een weerzinwekkende Levitator presenteren die naast het Arduino-bord slechts een paar extra componenten bevat en die heel gemakkelijk is voor doe-het-zelvers:
- Elke middelste vermogenstransistor:in mijn geval BD241
- Universele diode 1N4001
- Weerstand 1 Kohm
- UGN3503 Hall-effectsensor (u kunt elke 5V RATIOMETRISCHE hall-effectsensor gebruiken)
- Torus-magneet van een oude luidspreker (met een diameter van 9 cm tot 11 cm en meer).
- In plaats van een grote torusmagneet, kunnen groepen kleine neodymiummagneten worden gebruikt als een regelmatige zeshoek, zoals in commerciële apparaten.
- Solenoïde samengesteld uit ongeveer 200 kronkelende geïsoleerde koperdraad 30AWG. In dit geval heb ik een solenoïde gebruikt die uit de oude kassalade is verwijderd.
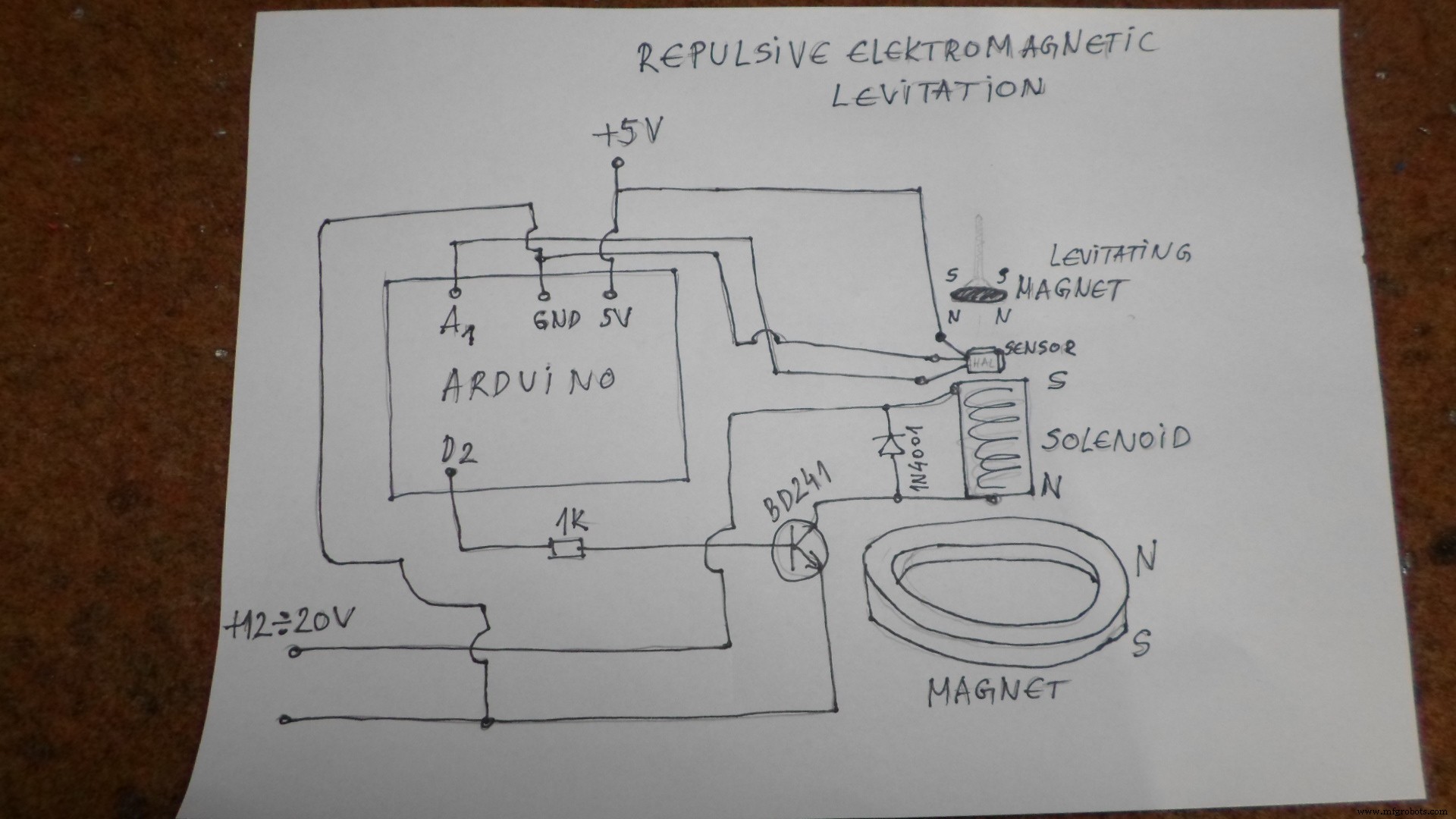
De schakeling is heel eenvoudig en wordt hieronder in de afbeelding weergegeven. Arduino wordt standaard gevoed met 5V en solenoïde via transistor met 12v-20v. Beide hebben een gemeenschappelijke massa. Polariteit van magneten en solenoïde wordt getoond in de afbeelding. Voor aanpassing heb je wat geduld en tijd nodig, en in feite is er de plezier in het maken van een apparaat.De hal-sensor hoort bovenaan boven de solenoïde te zitten.Bovenop zit de magneet die moet zweven.In mijn geval was de instelling om de torusmagneet op en neer te bewegen.Naast hardware is er is ook een instelling in de code door de waarde van de eerste rij in de code te wijzigen en kan variëren van 200 tot 350. Met een combinatie van deze twee instellingen krijgen we de beste resultaten.
Code
- Naamloos bestand
Naamloos bestandArduino
int set_point =250; // settingsint sensorPin =A1;int output_pin =2;int sensorValue =0;void setup() {Serial.begin (9600); pinMode (output_pin, OUTPUT);} ongeldige lus () {sensorValue =analogRead (sensorPin); //Serial.println(sensorValue); if (sensorValue <=set_point) digitalWrite (output_pin, LOW); anders digitalWrite (output_pin, HOOG); } Schema's
Productieproces
- Arduino digitale dobbelstenen
- Multitemperatuursensor
- Arduino-gamecontroller
- MotionSense
- 3D-printer brandveiligheid
- Pixel Chaser-game
- IoT-meter met Arduino, Yaler en IFTTT
- Arduino aangedreven weerballon datalogger
- Enkele LED Matrix Arduino Flip Clock
- Microcontrollers Lab
- CoroFence - Thermische Detector🖖