


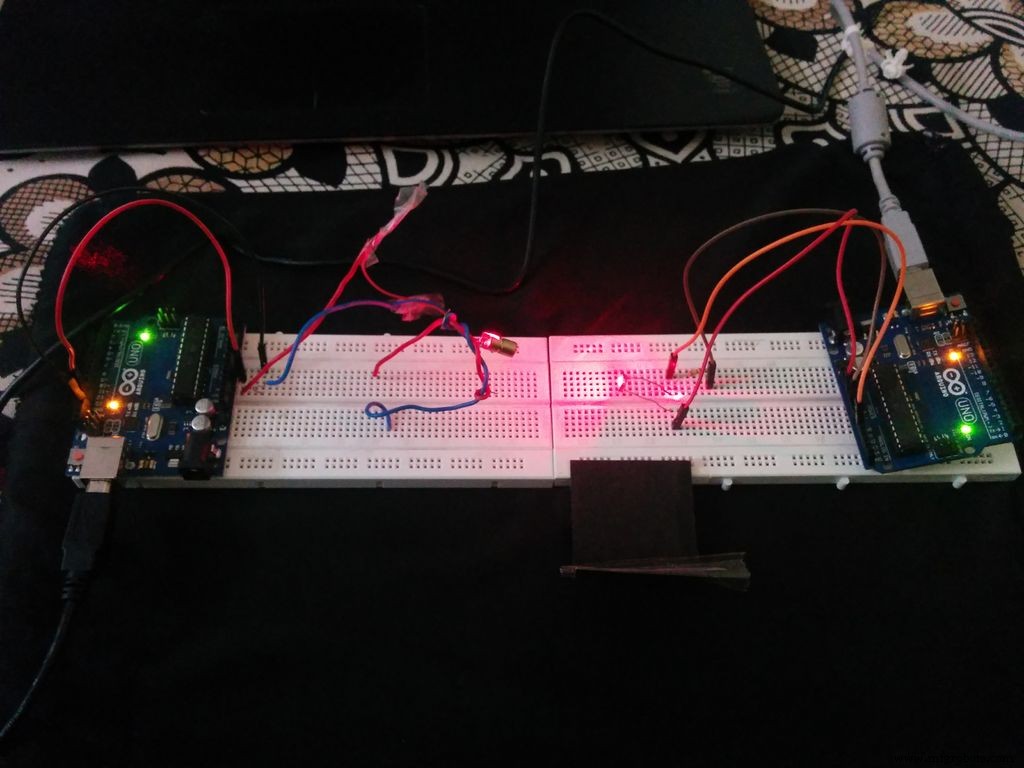
Morsecodecommunicatie met lasermodule (beide)
Componenten en benodigdheden
 |
| × | 2 | |||
 |
| × | 2 | |||
| × | 1 | ||||
 |
| × | 1 | |||
 |
| × | 1 |
Apps en online services
 |
|
Over dit project
Morsecode
Morsecode betekent het omzetten van de alfanumerieke symbolen (d.w.z. alfabetten en cijfers) in punten en streepjes. Elk symbool heeft een andere rangschikking van punten en streepjes waardoor ze uniek zijn. Morsecode wordt gebruikt om de geheime gegevens of de gecodeerde gegevens te verzenden. In dit project heb ik het zender- en ontvangergedeelte van de morsecodecommunicatie gemaakt. Het unieke in dit project van verschillende communicatieprojecten met morsecode is dat het algoritme van de ontvangersectie heel eenvoudig is dan enig ander algoritme.
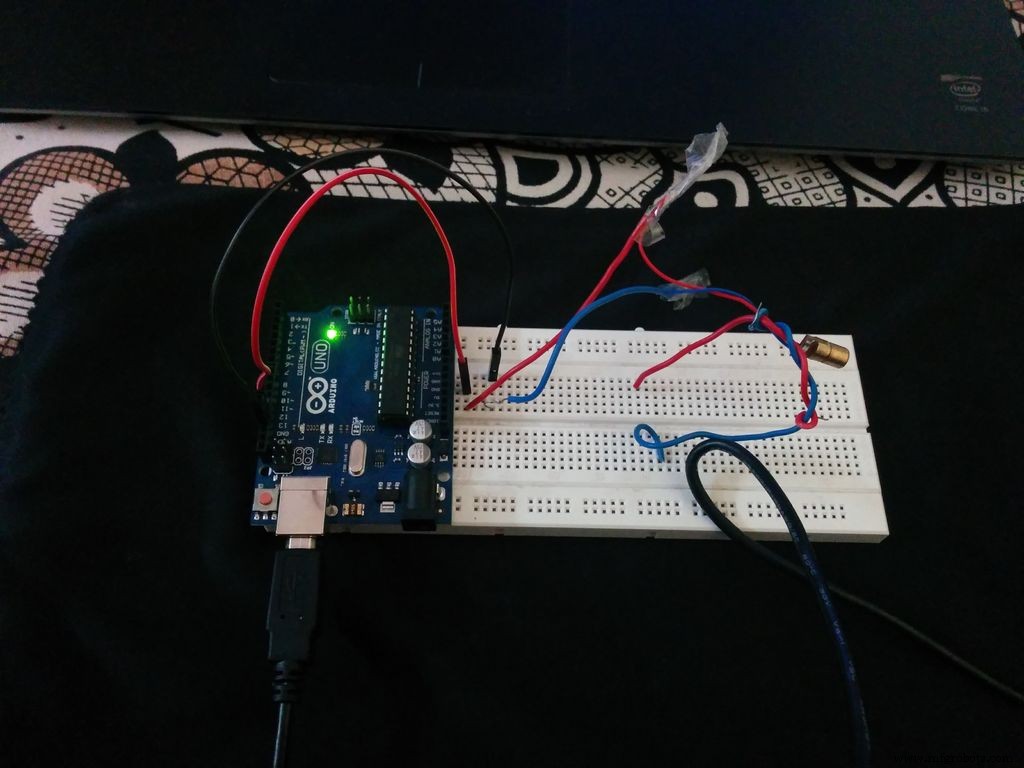
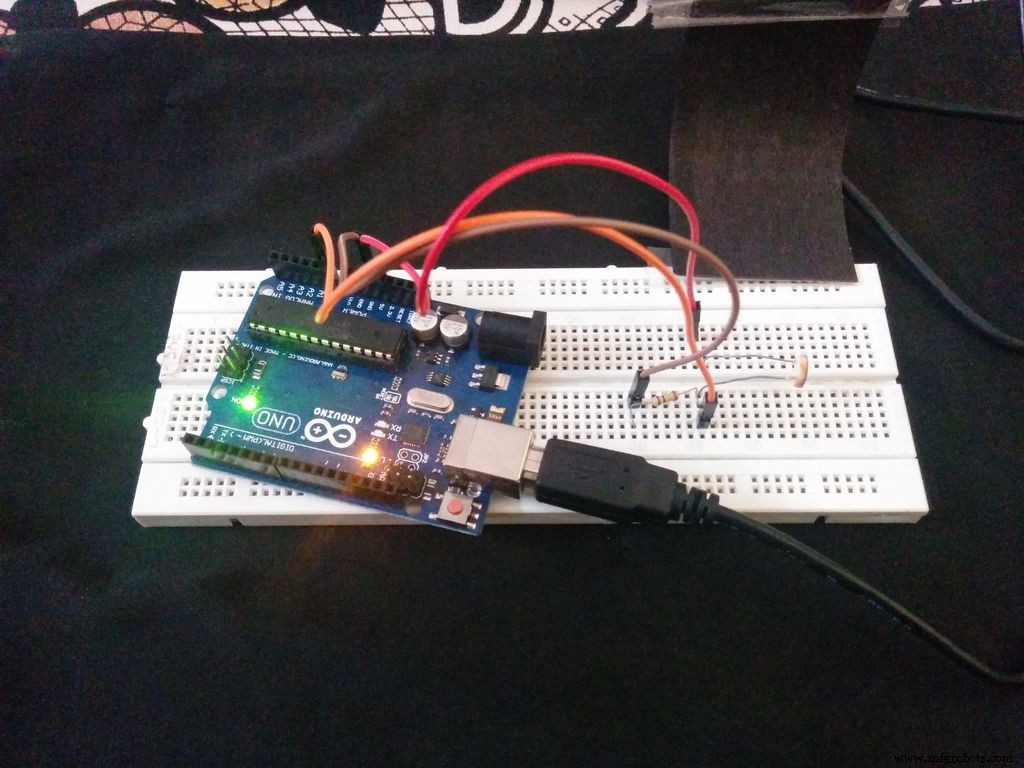
Stap 1:Zendersectie
De zendersectie wordt gebruikt om de invoergegevens via LASER te verzenden.
Benodigde hardware:-
- Arduino Uno
- LASER tTransmitter
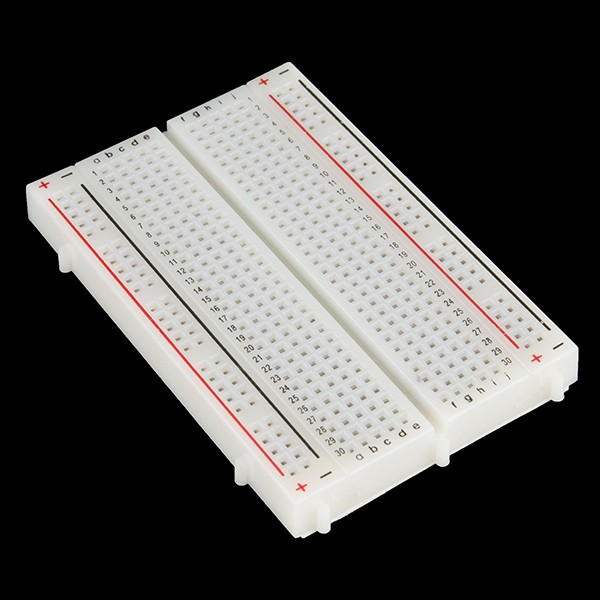
- Broodplank
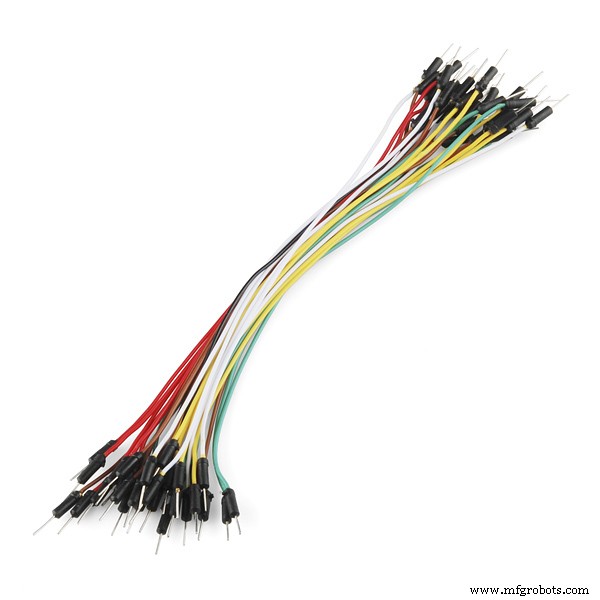
- Jumperdraden
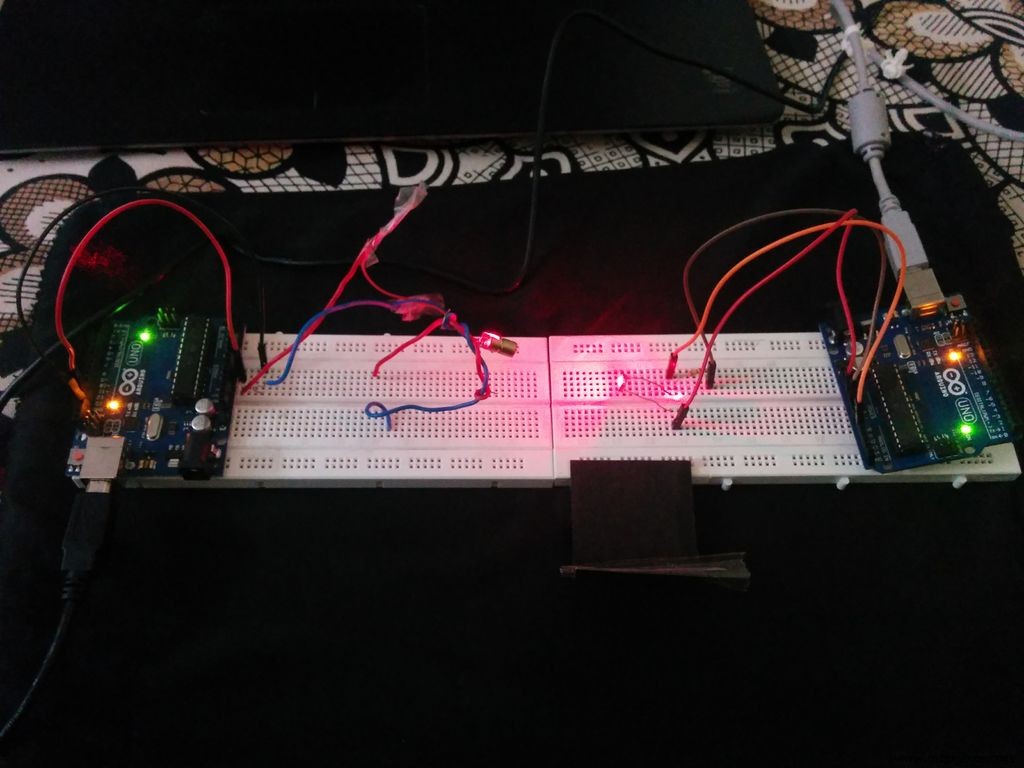
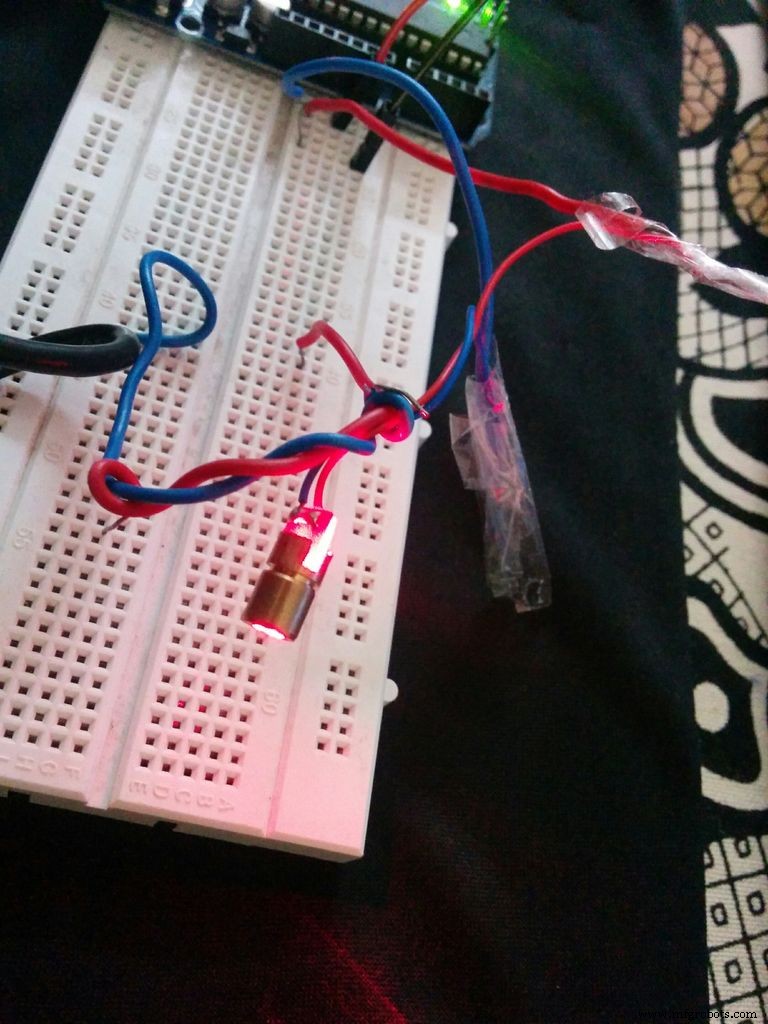
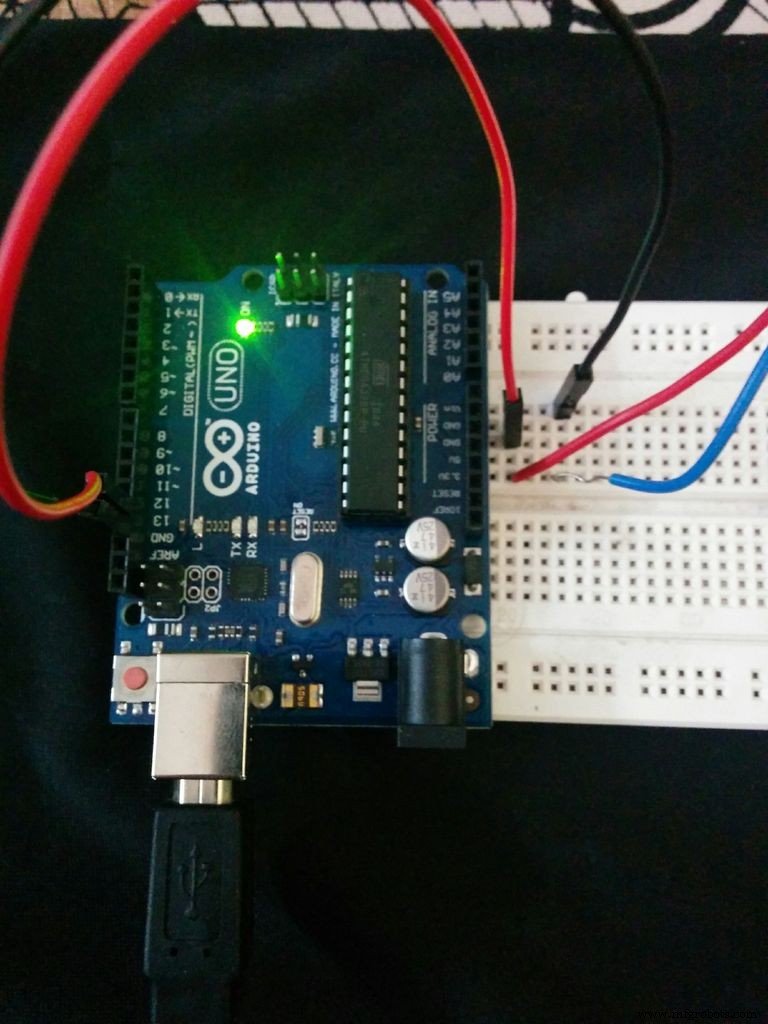
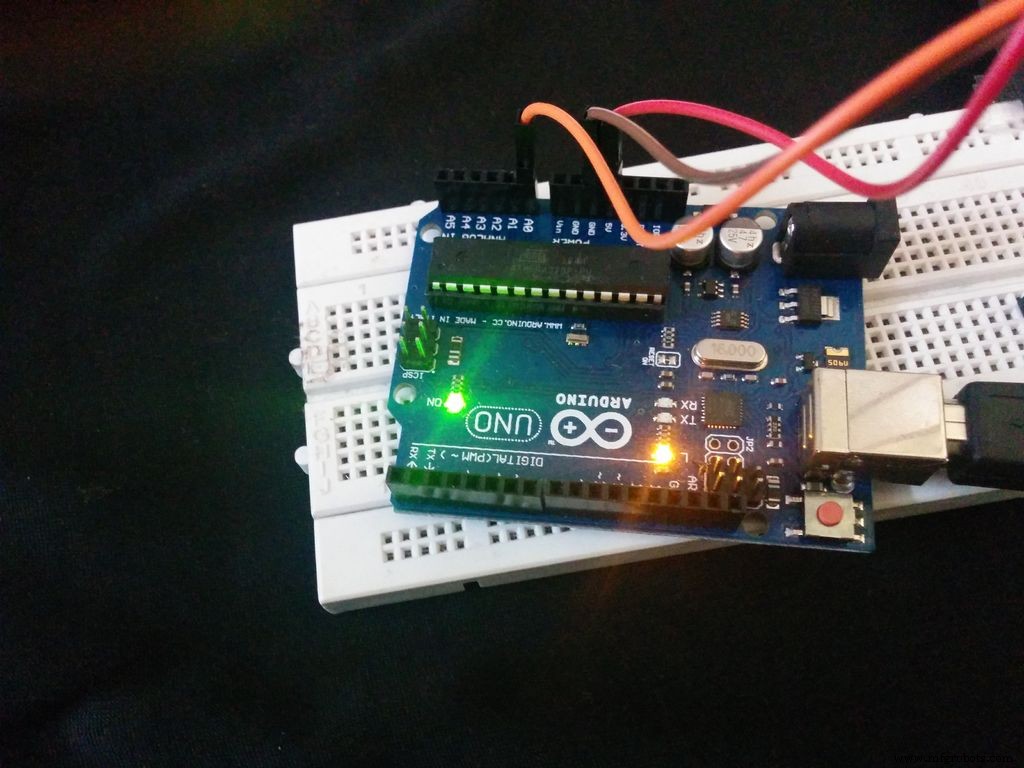
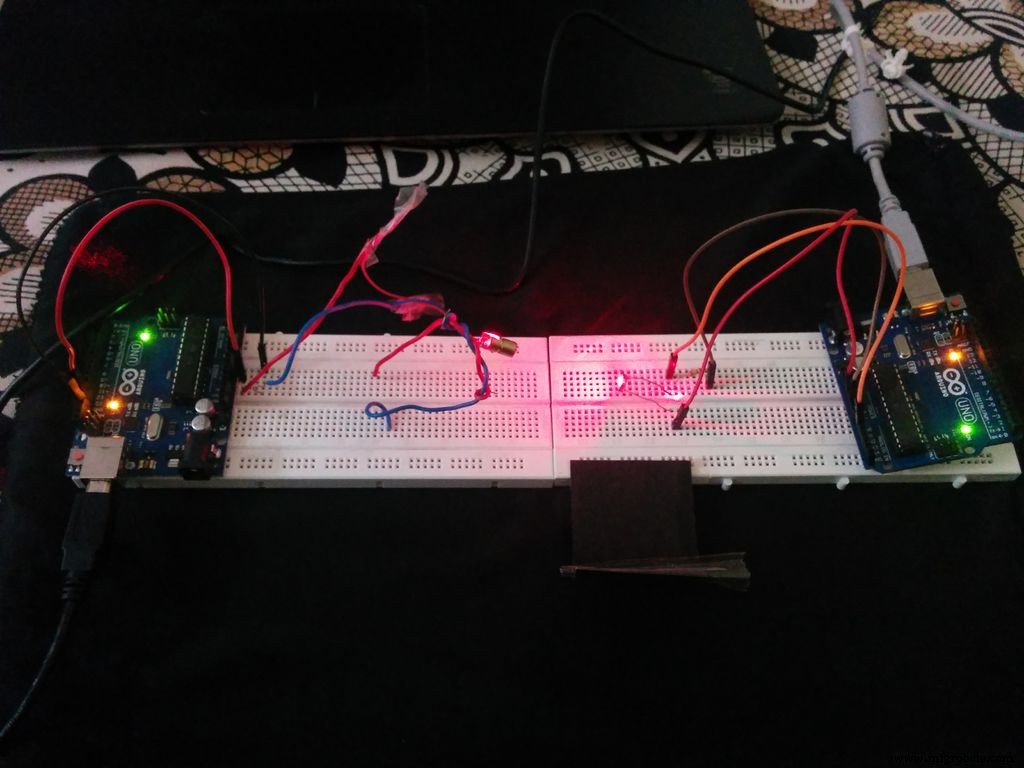
Verbindingen:-
Verbind de positieve pin van LASER met de 13e pin van Digital Input in Arduino (zoals geprogrammeerd in de code). Verbind de GND van LASER met de GND van Arduino.
Programma:-
Het algoritme van de code is als volgt:-
- 1. De gegevens die moeten worden verzonden, worden als invoer bewaard en worden opgeslagen door een array van char.
- 2. De LED-pin die moet worden verzonden, is gedefinieerd.
- 3. Snelheid van de morsecode is ingesteld.
- 4. Punten en streepjes zijn gedefinieerd.
- 5. Het ingevoerde teken wordt gecontroleerd via de schakelkast en de bijbehorende HIGH en LOW van de LASER wordt verzonden.
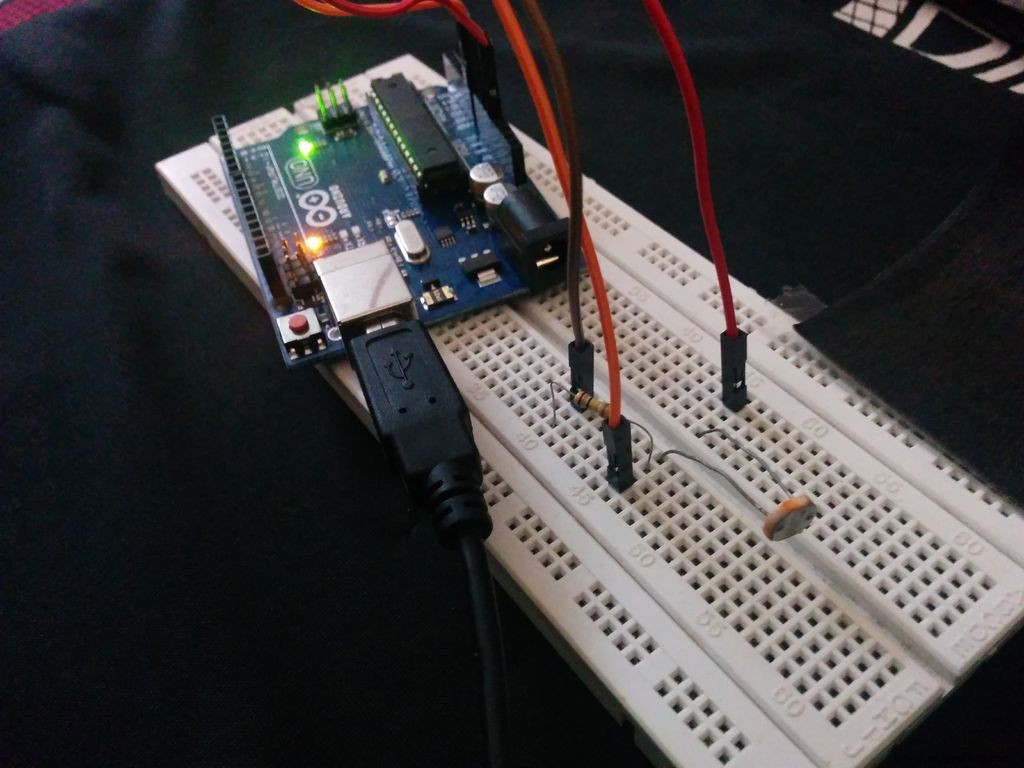
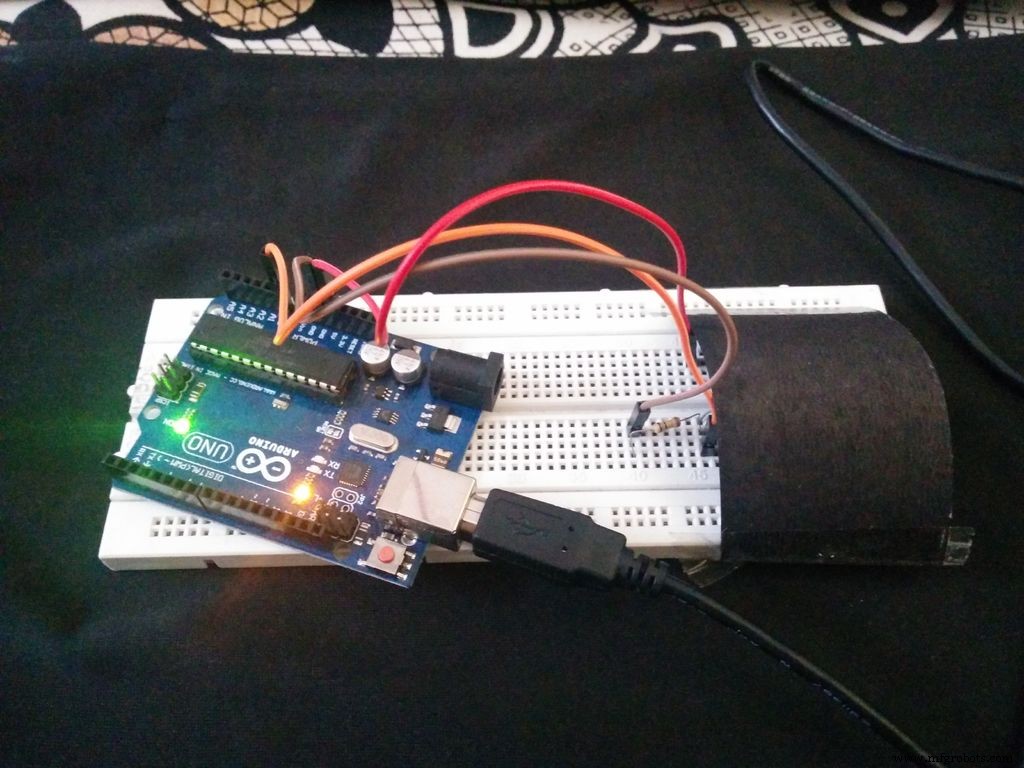
Stap 2:Ontvangersectie
De gecodeerde gegevens die door de zender worden verzonden, worden ontvangen en verwerkt, waarna ze worden weergegeven op de seriële monitor.
Benodigde hardware:-
- 1. Arduino Uno
- 2. LDR
- 3. Weerstand - 10 K ohm
- 4. Broodplank
- 5. Doorverbindingsdraden
Verbindingen:-
Sluit het ene uiteinde van de LDR aan op 5V Arduino-voeding. Sluit het andere uiteinde van de LDR aan met een weerstand van 10K ohm en met analoge ingang A0. Verbind het andere uiteinde van de weerstand met GND van de Arduino.
Programma:-
Het algoritme dat in de ontvangersectie wordt gebruikt, is het gemakkelijkste algoritme dan alle andere die op internet beschikbaar zijn. Dit algoritme zit vol observaties.
- 1. Als er geen LASER op de LDR valt, dan is de waarde van LDR minder dan 1000. Als de waarde boven de 1000 komt, zelfs als de LASER op de LDR brandt, moet u de LDR afdekken om te beschermen tegen extra licht dat erin komt. Hier is de LDR bedekt met een koepel van zwart kaartpapier.
- 2. Wanneer de LASER op de LDR valt, gaat de waarde verder dan 1000, en dan gaat hij in een lus.
- 3. Kwantiseer nu de waarden, d.w.z. als de waarde hoger is dan 1000, wijs het dan toe als '1', anders wijs het toe als '0'.
- 4. Bereken binnen een lus het aantal '1's en '0's'. Stel de tellers in op 'a' en 'f'. Tel het aantal '1's en sla het op in 'a' en tel op dezelfde manier het aantal '0's en sla het op in 'f'.
- 5. Controleer nu de specifieke waarden van respectievelijk 'a' en 'f'. Elk personage heeft een andere reeks 'a' en 'f'. De overeenkomende waarde wordt weergegeven.
Beperking:-
Het programma dat aan de code is gekoppeld, wordt gebruikt om de specifieke tekens af te drukken. U kunt de code verder verbeteren door combinaties te gebruiken en alle tekensets weer te geven. Het belangrijkste doel van de code is om u het algoritme te laten begrijpen en te laten werken.
Code
- CODE-1- VOOR HET BEDIENEN VAN DE LASER-EMITTER
- CODE-2 - VOOR HET EINDE VAN DE ONTVANGER
CODE-1- VOOR HET BEDIENEN VAN DE LASER-EMITTERArduino
int led13 =13; // knippert een led op uitgang 13/* Stel de snelheid van uw morsecode in Hier zijn de verhoudingen code-elementen:Dash lengte =Dot lengte x 3 Pauze tussen elementen =Dot lengte */int dotLen =200; // lengte van de morsecode 'dot'int dashLen =dotLen * 3; // lengte van de morsecode 'dash'int elemPause =dotLen;// lengte van de pauze tussen elementen van een characterint Spaces =dotLen * 3; // lengte van de spaties tussen karaktersint wordPause =dotLen * 7; // lengte van de pauze tussen wordvoid setup() {// initialiseer de digitale pin als een output voor LED-verlichting. pinMode (led13, UITGANG); }// Maak een lus van de letters/woorden die u wilt uitvoeren in morsecode (gedefinieerd in string bovenaan de code) void loop(){ // Loop door de string en haal elk teken één voor één op tot het einde is bereikt voor (int i =0; i CODE-2 - VOOR HET EINDE VAN DE ONTVANGERArduino
int sensorPin =0; // selecteer de invoerpin voor ldrint sensorValue =0; // variabele om de waarde op te slaan die afkomstig is van de sensorint a, f; // flagsvoid setup () {Serial.begin (9600); // stelt seriële poort in voor communicatie} void loop () {sensorValue =analogRead (sensorPin); // lees de waarde van de sensor//Serial.println(sensorValue);if(sensorValue>1000)// bereken het aantal punten en streepjes{ for(int i=0;i<=13;i++) { sensorValue=analoog lezen (sensorPin); if(sensorValue>1000) { a++; // het berekenen van het aantal punten en streepjes in de tekenvertraging (200); } anders { f++; // berekenen van het aantal spaties in punten en streepjes vertraging (200); } }}//Serial.print("a="+a);//Serial.println("f="+f);//Serial.println();/* * Controle van de reeks punten, streepjes en spaties */if(a==4 &&f==10){ Serial.print("a");}if(a==6 &&f==8){ Serial.print("b");}if (a==8 &&f==6){ Serial.print("c"); }if(a==1 &&f==13){ Serial.print("e");}if(a==2 &&f==12){ Serial.print("i");}if(a ==10 &&f==4){ Serial.print("j");}if(a==7 &&f==7){ Serial.print("g");}if(a==9 &&f==5){ Serial.print("o");}if(a==3 &&f==11){ Serial.print("s");}f=a=0;vertraging(200); } Aangepaste onderdelen en behuizingen
Schema's
Productieproces
- Gids voor lasermarkering
- Laseraanwijzer
- Halfgeleiderlaser
- Barcodescanner
- Lasergeleide raket
- Interactieve laserprojector met Zigbee-sensoren
- Board-to-Board-communicatie
- Gebaargestuurde robot met Raspberry Pi
- DTMF-decoder met alleen Arduino
- Python3- en Arduino-communicatie
- 4 Voordelen van het gebruik van Low Code in industriële productie