


Volautomatische waterniveauregelaar met SRF04
Volautomatische waterniveauregelaar met SRF04, L293D &PIC16F84A
Inleiding tot de automatische waterniveauregelaar
Bewaking en controle van het waterpeil in watertanks is een van de belangrijkste werkzaamheden in bijna veel residentiële en commerciële gebieden. In de meeste gevallen, vooral in woongebouwen, wordt het vanwege het ontbreken van automatische middelen vermoeiend en onhandig om regelmatig het waterniveau in de tanks te controleren. Voor plaatsen met waterschaarste zou het overstromen van water zelfs een behoorlijk dure aangelegenheid zijn om voor te betalen.
De enige oplossing voor het bovenstaande probleem is om een automatische manier te hebben om het waterniveau te bewaken en te regelen. Hoewel er veel technieken zijn, zoals het gebruik van afstandssensoren, het gebruik van stroomsondes, het gebruik van ultrasone rangers enz., gaan we ons hier concentreren op het gebruik van ultrasone rangers.

- Gerelateerd project: Regenalarmcircuit - Sneeuw-, water- en regendetectorproject
Systeemoverzicht van waterniveauregelaar
Het systeem bestaat uit een ultrasone afstandssensor die bovenop de tank is geplaatst, zodat het een ultrasoon signaal uitzendt wanneer het eenmaal is geactiveerd. Water dat in de tank aanwezig is, zou het signaal weerkaatsen. De sensor zou dit signaal ontvangen en de tijd tussen deze twee signalen geeft een schatting van de door de signalen afgelegde afstand, dus het waterniveau van bovenaf.
Hier wordt een microcontroller gebruikt om een triggersignaal naar de ultrasone ranger te sturen. Zodra een echo is ontvangen, wordt het tijdsverloop tussen de twee pulsen berekend en dit is recht evenredig met het waterniveau. De vertraging wordt berekend met behulp van Timer, waarvan het aantal telpulsen de door het signaal afgelegde afstand of het waterniveau aangeeft.
Omdat hier de ranger bovenop de tank is geplaatst, wordt de waterstroom geregeld rekening houdend met het waterniveau vanaf de bovenkant van de tank. Als het meetbereik bijvoorbeeld tussen 0 en 1 cm blijkt te zijn, loopt de tank over en stuurt de microcontroller een stuursignaal om de motor in omgekeerde richting te draaien om het overtollige water te verwijderen. ‘
Als het bereik tussen 2 en 5 cm is, is de tank vol en stuurt de microcontroller een stuursignaal om de motor uit te schakelen. Als het bereik meer dan 5 cm is, is de tank bijna leeg en stuurt de microcontroller een stuursignaal om de motor in voorwaartse richting te draaien.
Circuitdiagram van automatische waterniveauregelaar
Klik op afbeelding om te vergroten
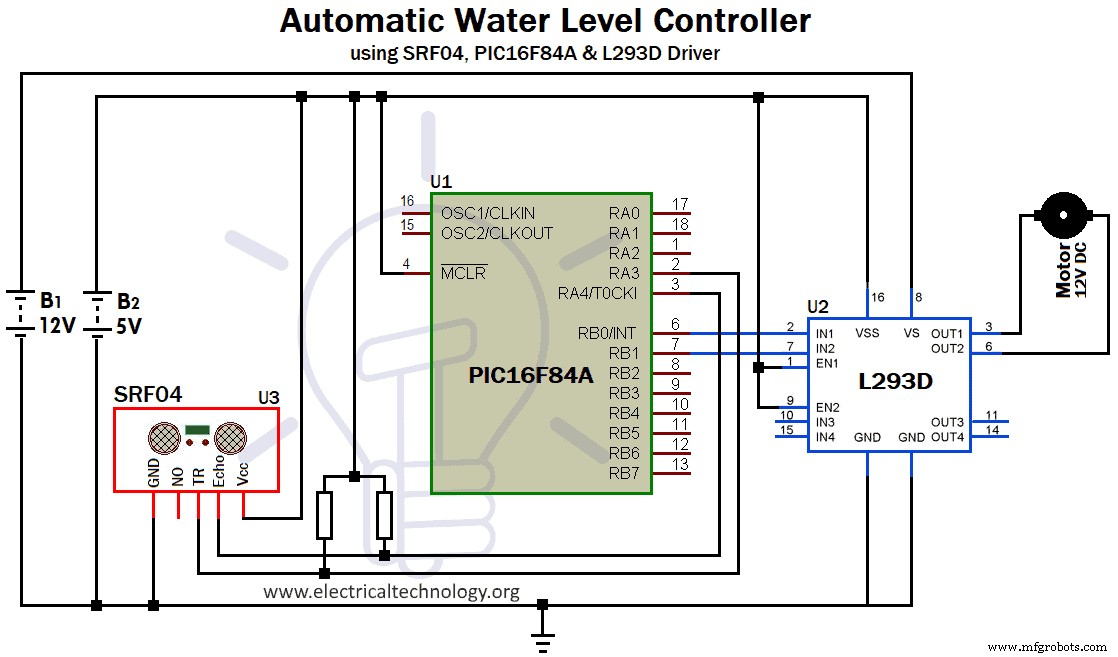
Figuur 1:Waterniveauregelaar
Onderdelenbeschrijving
De volgende componenten zouden worden gebruikt voor het ontwerpen van het circuit.
- Ultrasone afstandsmeter SRF04
- PIC-microcontroller PIC16F84A
- Motorstuurprogramma L293D
- DC-motor
- Twee 1K-weerstanden
Laten we een kort idee hebben over elk onderdeel
Ultrasone afstandsmeter SRF04 :
De SRF04 is een ultrasone ranger van hoge kwaliteit die in veel robottoepassingen wordt gebruikt voor het eenvoudig detecteren van obstakels. Er is een signaal van 10 microseconden nodig om te worden geactiveerd. 
Afbeelding 2:SRF04 Ultrasone afstandsmeter
Eenmaal geactiveerd, zendt het 8 ultrasone pulsen uit, met een frequentie van 40 KHz, en stuurt het tegelijkertijd de echolijn naar HOOG. Zodra het het gereflecteerde signaal of de echo ontvangt, verlaagt het de echolijn naar LAAG.
De breedte van de echopuls geeft dus de afstand aan die door het signaal is afgelegd, of met andere woorden de afstand van de ranger tot het object. De echolijn is dus een puls waarvan de breedte evenredig is met de afstand tot het object. Voor 1 cm zou de echopulsbreedte 58 microseconden zijn. 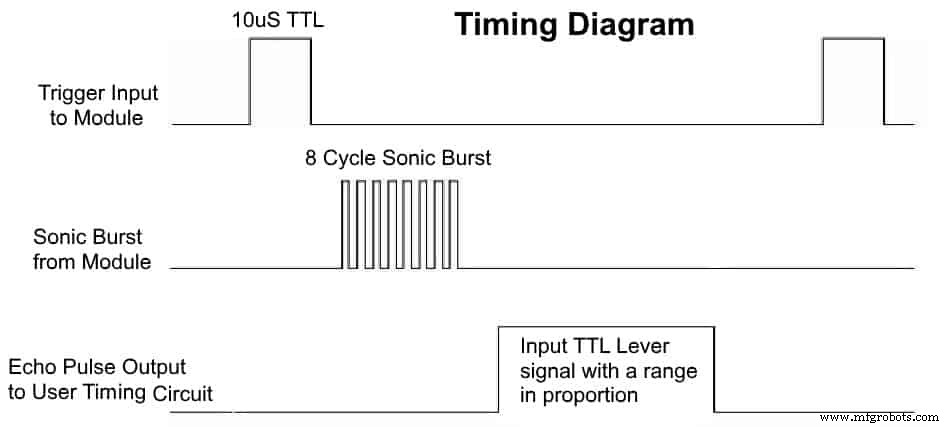
Afbeelding 3:SRF04-timingdiagram
PIC-microcontroller PIC16F84A:
Afbeelding 4:PIC-microcontroller PIC16F84A
Het is een CMOS-compatibele, 8-bit, 18-pins Flash Microcontroller met een enkele 8-bit Timer (met 8-bit programmeerbare prescaler). De werking van de timer wordt bestuurd met behulp van de volgende registers – OPTION_REG, TMR0 en INTCON. De OPTION_REG is een 8-bits register waarvan de 5 de bit (T0CS) selecteert de gewenste timer- of tellerwerking.
Als u de bit instelt, wordt de tellerwerking geselecteerd, terwijl het wissen de timerbewerking selecteert. TMR0 is het timerregister, terwijl INTCON het interruptregister is waarvan de 5
de
bit (T0IE) geeft de timervlag aan, d.w.z. het stelt in wanneer de timer overloopt. 
Motorstuurprogramma L293D:
Afbeelding 5:Motorstuurprogramma IC L293D
Het is een 16-pins, H-bridge-gebaseerd DC-motorstuurprogramma. Het heeft de capaciteit om twee motoren en in beide richtingen aan te drijven. Het bestaat uit twee activeringspinnen (Pin1 en 9) die, indien ingesteld op HOOG, de IC-werking inschakelen. Het fungeert in feite als een interface tussen de microcontroller en de DC-motor. Het bestaat uit vier ingangspinnen - twee voor elk H-brugcircuit. Hieronder vindt u een tabel die de motorbesturing aangeeft. 
| IN1(Pin 2) | IN2 (pin 7) | EN1 (Pin 1) | Motorbediening |
| HOOG | HOOG | HOOG | UIT |
| LAAG | LAAG | HOOG | UIT |
| HOOG | LAAG | HOOG | AAN (met de klok mee) |
| LAAG | HOOG | HOOG | AAN (tegen de klok in) |
| X | X | LAAG | UIT |
Opmerking:aangezien SRF04 een TTL-compatibel apparaat is en PIC16F84A CMOS-compatibel is, gebruiken we een pull-upweerstand van 1K-waarde om de verandering in het spanningsniveau te compenseren.
Werking en werking van automatische waterniveauregelaar
Het programma is zo geschreven dat een puls van 10 microseconden wordt verzonden vanaf de microcontroller om de ultrasone ranger te activeren. Dit wordt geschreven met behulp van een vertragingsfunctie. Het timerregister, TMR0, wordt geladen met de decimale waarde 200, zodat het 55 tellingen maakt.
De uitvoer van SRF04, het echosignaal, wordt ontvangen op pin RA4 (de timerklokpen, waardoor een externe klokpuls aan de timer wordt geleverd). Zodra het echosignaal een overgang maakt van HOOG naar LAAG, wordt de timer geactiveerd. Terwijl de timer telt, wordt het interruptvlagbit, T0IE, bewaakt. Eenmaal ingesteld, wordt de timer gedeactiveerd.
De procedure wordt herhaald voor nog een echopuls enzovoort. Het aantal keren dat de timer werkt, wordt berekend en dit geeft het aantal echopulsen aan. Aangezien elke echopuls 58 microseconden is, geeft dit 1 cm aan. Dus 5 echopulsen zouden 5 cm aangeven. De waarde van deze telling, opgeslagen in een geheel getal, wordt gebruikt om de gelijkstroommotor te besturen.
Als de waarde tussen 2 en 5 ligt, stuurt de microcontroller HOGE signalen naar pinnen RB0 en RB1 (respectievelijk aangesloten op IN1 en IN2 van L293D), om de motor UIT te schakelen. Als de waarde tussen 5 en 20 ligt, stuurt de microcontroller een HOOG signaal naar IN1 en een LAAG signaal naar IN2, om de motor AAN te zetten en met de klok mee te draaien. Als de waarde tussen 0 en 1 ligt, stuurt de microcontroller een LAAG signaal naar IN1 en een HOOG signaal naar IN2, om de motor AAN te zetten en tegen de klok in te draaien.
Voordelen van automatische waterniveauregelaar met SRF04
- Het zou een eenvoudig en handig systeem zijn.
- Het zou een goedkoop systeem zijn vanwege het gebruik van goedkope componenten.
- Het gebruik van automatische techniek zou de hindernissen wegnemen bij waterniveauregeling met handmatige middelen.
- Omdat er geen mechanische onderdelen worden gebruikt, zou dit het risico op mechanische slijtage of corrosie elimineren.
Nadelen van automatische waterniveauregelaar
- De ultrasone afstandsmeter, SRF04, zou onderhevig zijn aan demping door het gebruik van veel elektronica en zou dus goed geïsoleerd moeten zijn.
- Dit systeem is zo ontworpen dat zowel de sensor als de actuator in de buurt van elkaar moeten worden geplaatst. In de woorden van de leek, dit besturingssysteem is voor plaatsen waar de watertank zich in de buurt van de waterpomp bevindt. Dus voor veel gebouwen waar dompelpompen worden gebruikt en watertanks op de daken zijn, is dit Automatische Water Level Controller-systeem kan niet worden gebruikt. Dit kan echter worden gewijzigd door het communicatiecircuit te gebruiken.
Industriële technologie
- PWM-vermogenscontroller
- Waterloze technologieën gebruiken in het verfproces
- 4 voordelen van het gebruik van slimme lekdetectie-oplossingen in gebouwen
- 5 voordelen van het gebruik van Biz4intellias IoT-aangedreven waterlekdetectiesysteem in industrieën
- Intelligente waterstandbewaking en -regeling voor effectief waterbeheer
- 7 Voordelen van het gebruik van Biz4Intellia's Smart Level Monitoring-oplossing
- Een door IoT aangedreven rivierniveaubewakingssysteem gebruiken voor efficiënt waterbeheer
- Is polyurethaan waterdicht?
- Handmatig versus automatische stuklijst
- 7 voordelen van een volledig/semi-automatische keuken voor cloudkeukens
- Wat is een automatische waterpomp?