


Selsyn (Synchro) Motors
Normaal gesproken worden de rotorwikkelingen van een inductiemotor met gewikkelde rotor kortgesloten na het starten. Tijdens het starten kan weerstand in serie worden geplaatst met de rotorwikkelingen om de startstroom te beperken. Als deze wikkelingen zijn aangesloten op een gemeenschappelijke startweerstand, blijven de twee rotoren gesynchroniseerd tijdens het starten.
Dit is handig voor drukpersen en ophaalbruggen, waar twee motoren moeten worden gesynchroniseerd tijdens het starten. Eenmaal gestart en de rotoren zijn kortgesloten, is het synchronisatiekoppel afwezig. Hoe hoger de weerstand tijdens het starten, hoe hoger het synchronisatiekoppel voor een paar motoren.
Als de startweerstanden zijn verwijderd, maar de rotoren nog steeds parallel lopen, is er geen startkoppel. Er is echter een aanzienlijk synchronisatiekoppel. Dit wordt een selsyn . genoemd , wat een afkorting is voor "self synchronous".
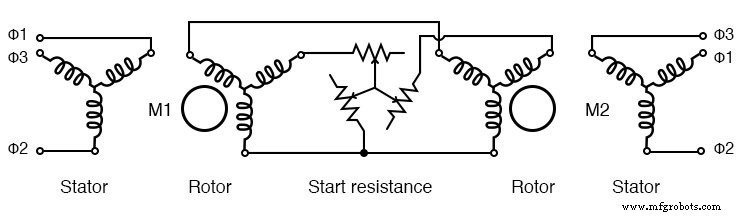
Woordrotor-inductiemotoren starten met gewone weerstanden
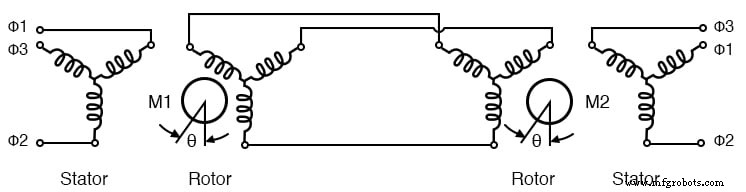
De rotoren kunnen stationair zijn. Als de ene rotor over een hoek wordt bewogen, zal de andere selsyn-as over een hoek θ bewegen. Als er weerstand wordt uitgeoefend op één selsyn, zal dit worden gevoeld wanneer wordt geprobeerd de andere as te draaien.
Hoewel selsyns met meerdere pk's (multi-kilowatt) bestaan, zijn de belangrijkste toepassingen kleine eenheden van een paar watt voor instrumentatietoepassingen - indicatie van positie op afstand.
Selsyns zonder weerstand
Instrumentatie selsyns hebben geen nut voor startweerstanden (figuur hierboven). Ze zijn niet bedoeld om zelfdraaiend te zijn. Omdat de rotoren niet worden kortgesloten en geen weerstand wordt belast, wordt er geen startkoppel ontwikkeld.
Handmatige rotatie van één as zal echter een onbalans in de rotorstromen veroorzaken totdat de as van de parallelle eenheid volgt. Merk op dat op beide stators een gemeenschappelijke bron van driefasige stroom wordt toegepast. Hoewel we hierboven driefasige rotoren laten zien, is een enkelfasige aangedreven rotor voldoende, zoals weergegeven in de onderstaande afbeelding.
Zender - Ontvanger
Kleine instrumentatie selsyns, ook bekend als synchros , maakt gebruik van enkelfasige parallelle, AC-bekrachtigde rotoren, waarbij de driefasige parallelle stators behouden blijven, die niet extern worden bekrachtigd. Hieronder wordt de synchros-functie weergegeven als roterende transformatoren.
Als de rotoren van zowel de koppelzender (TX) en koppelontvanger (RX) onder dezelfde hoek staan, zullen de fasen van de geïnduceerde statorspanningen voor beide identiek zijn en zal er geen stroom vloeien.
Als de ene rotor van de andere wordt verplaatst, zullen de statorfasespanningen verschillen tussen zender en ontvanger. Statorstroom zal stromen ontwikkelend koppel. De ontvangeras is elektrisch gekoppeld aan de zenderas. De zender- of ontvangeras kan worden gedraaid om de tegenoverliggende eenheid te draaien.
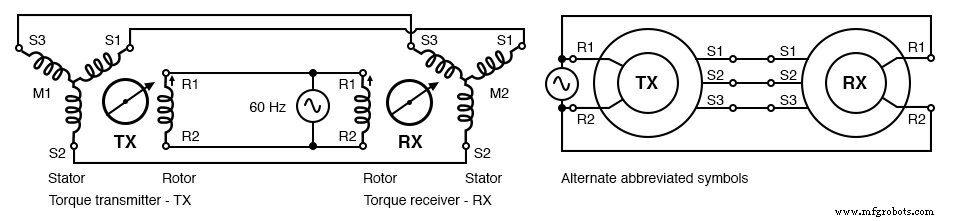
Synchros hebben enkelfasige aangedreven rotoren
Synchro-stators zijn gewikkeld met driefasige wikkelingen die naar externe terminals worden geleid. De enkele rotorwikkeling van een koppelzender of -ontvanger wordt naar buiten gebracht door geborstelde sleepringen. Synchroonzenders en ontvangers zijn elektrisch identiek.
Een synchroonontvanger heeft echter ingebouwde inertiële demping. Een synchrone koppelzender kan worden vervangen door een koppelontvanger.
Positiemeting op afstand is de belangrijkste synchrotoepassing. Een synchrozender gekoppeld aan een radarantenne geeft bijvoorbeeld de antennepositie aan op een indicator in een controlekamer.
Een synchrozender gekoppeld aan een windwijzer geeft de windrichting aan op een afstandsconsole. Synchros zijn beschikbaar voor gebruik met 240 Vac 50 Hz, 115 Vac 60 Hz, 115 Vac 400 Hz en 26 Vac 400 Hz stroom.
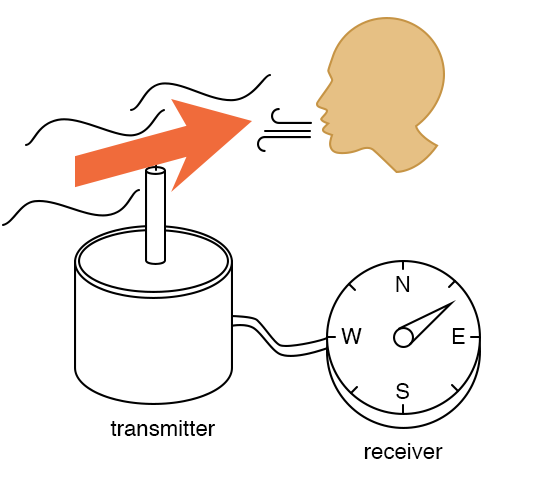
Synchro-toepassing:positie-indicatie op afstand
Differentiële zender-ontvanger
Een synchro-differentieelzender (TDX) heeft zowel een driefasige rotor als een stator. Een synchro-differentieeltransmitter voegt een ashoekinvoer toe aan een elektrische hoekinvoer op de rotorinvoeren, en voert de som uit op de statoruitvoeren.
Deze elektrische hoek van de stator kan worden weergegeven door deze naar een RX te sturen. Een synchro-ontvanger geeft bijvoorbeeld de positie van een radarantenne weer ten opzichte van de boeg van een schip. De toevoeging van de kompaskoers van een schip door een synchro differentiële zender, geeft de antennepositie op een RX weer ten opzichte van het ware noorden, ongeacht de koers van het schip.
Door het S1-S3-paar statordraden tussen een TX en TDX om te draaien, worden hoekposities afgetrokken.
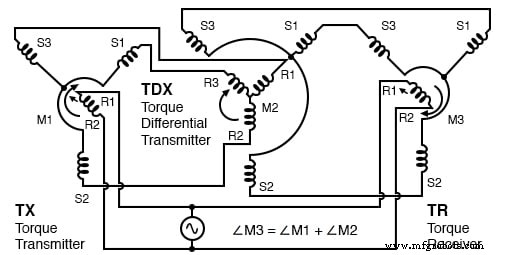
Koppeldifferentieelzender (TDX)
Een radarantenne aan boord gekoppeld aan een synchrozender codeert de antennehoek ten opzichte van de scheepsboeg (figuur hieronder). Het is gewenst om de antennepositie ten opzichte van het ware noorden weer te geven.
We moeten de schepen die op weg zijn van een gyrokompas toevoegen aan de boeg-relatieve antennepositie om de antennehoek weer te geven ten opzichte van het ware noorden (∠antenna + ∠gyro).
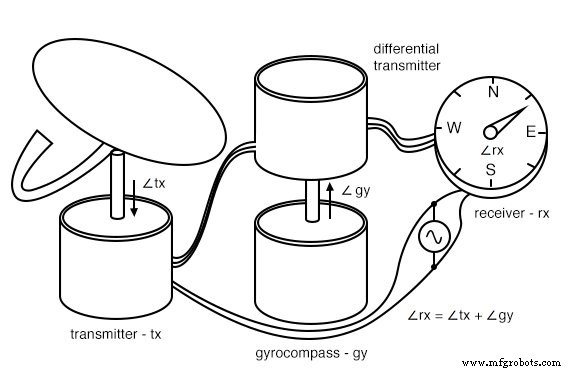
Toepassing koppeldifferentieeltransmitter:hoektoevoeging
∠antenne-N =antenne + ∠gyro rx =∠tx + ∠gy
De koers van het schip is bijvoorbeeld ∠30°, de antennepositie ten opzichte van de boeg van het schip is ∠0°, de ∠antenne-N is:
∠rx =∠tx + ∠gy ∠30° =∠30° + ∠0°
Voorbeeld, de koers van het schip is ∠30°, de antennepositie ten opzichte van de boeg van het schip is ∠15°, de ∠antenne-N is:
∠45° =∠30° + ∠15°
Optellen versus aftrekken
Ter referentie tonen we de bedradingsschema's voor het aftrekken en optellen van ashoeken met behulp van zowel TDX's (Torque Differential transmitter) als TDR's (Torque Differential Receiver). De TDX heeft een koppelhoekingang op de as, een elektrische hoekingang op de drie statoraansluitingen en een elektrische hoekuitgang op de drie-rotoraansluitingen.
De TDR heeft elektrische hoekingangen op zowel de stator als de rotor. De hoekuitgang is een koppel op de TDR-as. Het verschil tussen een TDX en een TDR is dat de TDX een koppelzender is en de TDR een koppelontvanger.
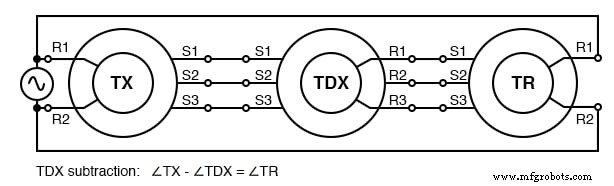
TDX aftrekken
De koppelingangen zijn TX en TDX. Het hoekverschil van de koppeluitgang is TR.
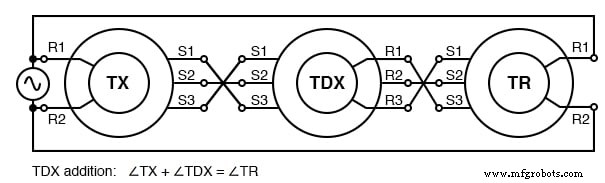
TDX-toevoeging
De koppelingangen zijn TX en TDX. De hoeksom van de koppeluitgang is TR.
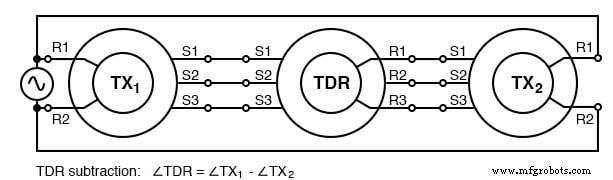
TDR aftrekken
De koppelingangen zijn TX1 en TX2 . Het hoekverschil van de koppeluitgang is TDR.
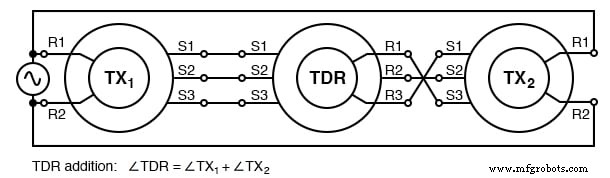
TDR-toevoeging
De koppelingangen zijn TX1 en TX2 . De hoeksom van de koppeluitgang is TDR.
Besturingstransformator
Een variatie op de synchrozender is de stuurtransformator . Het heeft drie gelijk verdeelde statorwikkelingen zoals een TX. De rotor is met meer windingen gewikkeld dan een zender of ontvanger om hem gevoeliger te maken voor het detecteren van een nul terwijl deze wordt gedraaid, meestal door een servo systeem.
Het uitgangssignaal van de CT-rotor (Control Transformer) is nul wanneer deze loodrecht op de vector van het magnetische veld van de stator staat. In tegenstelling tot een TX of RX, zendt of ontvangt de CT geen koppel. Het is gewoon een gevoelige hoekpositiedetector.
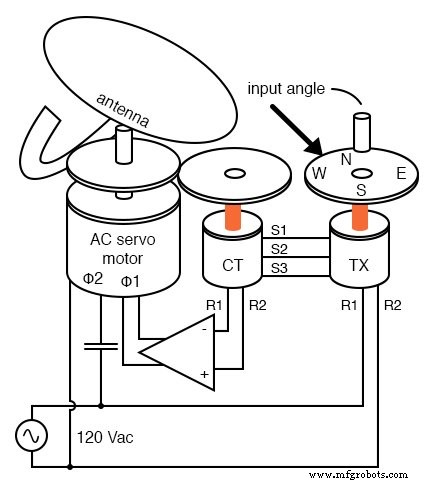
Besturingstransformator (CT) detecteert servo null
In bovenstaande figuur is de schacht van de TX ingesteld op de gewenste positie van de radarantenne. Het servosysteem zorgt ervoor dat de servomotor de antenne naar de opgedragen positie stuurt. De CT vergelijkt de opgedragen positie met de werkelijke positie en signaleert de servoversterker om de motor aan te drijven totdat die opgedragen hoek is bereikt.
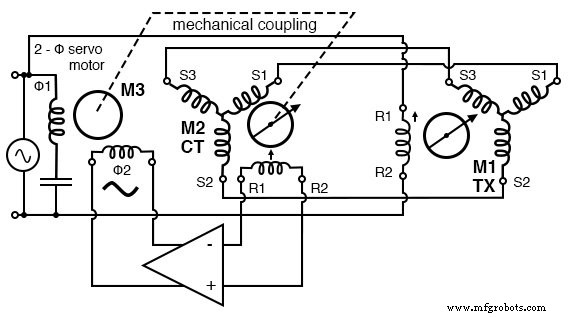
Servo gebruikt CT om antennepositie nul te detecteren
Wanneer de rotor van de besturingstransformator een nul detecteert op 90° naar de as van het statorveld is er geen rotoruitgang. Elke rotorverplaatsing produceert een AC-foutspanning die evenredig is met de verplaatsing.
Een servo probeert de fout tussen een gecommandeerde en gemeten variabele als gevolg van negatieve feedback te minimaliseren. De regeltransformator vergelijkt de ashoek met de magnetische veldhoek van de stator, verzonden door de TX-stator.
Wanneer het een minimum of nul meet, heeft de servo de antenne en de rotor van de besturingstransformator naar de bevolen positie gedreven. Er is geen fout tussen gemeten en opgedragen positie, geen CT-output die moet worden versterkt.
De servomotor , een 2-fasen motor, stopt met draaien. Elke door de CT gedetecteerde fout drijft echter de versterker aan die de motor aandrijft totdat de fout is geminimaliseerd. Dit komt overeen met het servosysteem dat de antennegekoppelde CT heeft aangestuurd om overeen te komen met de hoek die door de TX wordt opgedragen.
De servomotor kan een reductietandwiel aandrijven en groot zijn in vergelijking met de TX- en CT-synchro's. De slechte efficiëntie van AC-servomotoren beperkt ze echter tot kleinere belastingen. Ze zijn ook moeilijk te bedienen omdat het apparaten met constante snelheid zijn.
Ze kunnen echter tot op zekere hoogte worden geregeld door de spanning op de ene fase te variëren met de lijnspanning op de andere fase. Zware lasten worden efficiënter aangedreven door grote DC-servomotoren.
Toepassingen in de lucht gebruiken componenten van 400 Hz:TX, CT en servomotor. Grootte en gewicht van de magnetische AC-componenten zijn omgekeerd evenredig met de frequentie. Daarom bespaart het gebruik van 400 Hz-componenten voor vliegtuigtoepassingen, zoals bewegende stuurvlakken, afmetingen en gewicht.
Oplosser
Een oplosser (figuur hieronder) heeft twee statorwikkelingen op 90° met elkaar, en een enkele rotorwikkeling aangedreven door wisselstroom. Voor de conversie van polair naar rechthoekig wordt een resolver gebruikt. Een hoekinvoer op de rotoras produceert rechthoekige coördinaten sinθ en cosθ proportionele spanningen op de statorwikkelingen.
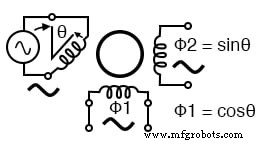
Resolver converteert schachthoek naar sinus en cosinus van de hoek
Een black-box in een radar codeert bijvoorbeeld de afstand tot een doel als een sinusgolf proportionele spanning V, met de peilingshoek als een ashoek. Converteren naar X- en Y-coördinaten. De sinusgolf wordt toegevoerd aan de rotor van een resolver. De lagerhoekas is gekoppeld aan de resolveras. De coördinaten (X, Y) zijn beschikbaar op de resolver-statorspoelen:
X=V(cos(∠lager)) Y=V(sin(∠lager))
De cartesiaanse coördinaten (X, Y) kunnen worden uitgezet op een kaartweergave. Een TX (koppelzender) kan worden aangepast voor dienst als resolver.

Scott-T converteert 3-φ naar 2-φ waardoor TX de resolverfunctie kan uitvoeren
Het is mogelijk om resolver-achtige kwadratuur-hoekcomponenten af te leiden van een synchrozender met behulp van een Scott-T transformator. De drie TX-uitgangen, 3-fasen, worden verwerkt door een Scott-T transformator in een paar kwadratuurcomponenten. Er is ook een lineaire versie van de resolver die bekend staat als een inductosyn. De roterende versie van de inductosyn heeft een fijnere resolutie dan een resolver.
Samenvatting:Selsyn (synchro) motoren
- Een synchro , ook bekend als een selsyn , is een roterende transformator die wordt gebruikt om het askoppel over te brengen.
- Een TX, koppelzender , accepteert een koppelinvoer op de as voor transmissie op driefasige elektrische uitgangen.
- Een RX, koppelontvanger , accepteert een driefasige elektrische weergave van een hoekinvoer voor conversie naar een koppeluitvoer op de as. TX brengt dus een koppel over van een ingaande as naar een externe RX-uitgaande as.
- Een TDX, torque differentiële zender , somt een elektrische hoekinvoer op met een ashoekinvoer en produceert een elektrische hoekuitvoer
- Een TDR, torque differentiële ontvanger, telt twee elektrische hoekinvoeren op en produceert een ashoekuitvoer
- Een CT, stuurtransformator , detecteert een nul wanneer de rotor in een rechte hoek staat ten opzichte van de invoer van de statorhoek. Een CT is typisch een onderdeel van een servo-feedbacksysteem.
- Een oplosser voert een kwadratuur sin(θ) en cos(θ) representatie uit van de ashoekinvoer in plaats van een driefasige uitvoer.
- De driefasige uitgang van een TX wordt door een Scott-T-transformator omgezet in een uitvoer in resolver-stijl .
Industriële technologie
- Synchrone motoren
- Eenfasige inductiemotoren
- AC-commutatormotoren
- Technische tip:motoren
- Aandrijvingen en motoren in testbanken voor auto's
- Voordelen van vloeistofgekoelde motoren
- Koolborstels in gelijkstroommotoren:gebruik, veelvoorkomende fouten en meer
- Elektromotorveiligheid:verschillende fasen en veiligheidsmaatregelen
- 7 stappen om te zorgen voor een beter onderhoud van elektrische motoren
- 4 belangrijke soorten wikkelfouten in AC-elektromotoren
- DC vs. AC elektromotoren:wat zijn hun verschillen?