


Inleiding tot digitale communicatie
Bij het ontwerpen van grote en complexe digitale systemen is het vaak nodig om één apparaat digitale informatie van en naar andere apparaten te laten communiceren. Een voordeel van digitale informatie is dat het veel beter bestand is tegen verzonden en geïnterpreteerde fouten dan informatie die in een analoog medium wordt gesymboliseerd.
Dit verklaart de helderheid van digitaal gecodeerde telefoonverbindingen, compact audiodisks en een groot deel van het enthousiasme in de technische gemeenschap voor digitale communicatietechnologie. Digitale communicatie heeft echter zijn eigen unieke valkuilen en er zijn talloze verschillende en incompatibele manieren waarop het kan worden verzonden.
Hopelijk zal dit hoofdstuk u informeren over de basisprincipes van digitale communicatie, de voor- en nadelen en praktische overwegingen.
Stel, we krijgen de opdracht om op afstand het niveau van een wateropslagtank te bewaken. Het is onze taak om een systeem te ontwerpen om het waterniveau in de tank te meten en deze informatie naar een verre locatie te sturen, zodat andere mensen het kunnen controleren.
Het meten van het tankniveau is vrij eenvoudig en kan worden bereikt met een aantal verschillende soorten instrumenten, zoals vlotterschakelaars, druktransmitters, ultrasone niveaudetectoren, capaciteitssondes, rekstrookjes of radarniveaudetectoren.
Voorbeeld van analoge communicatie
Ter wille van deze illustratie gebruiken we een analoge niveaumeter met een uitgangssignaal van 4-20 mA. 4 mA staat voor een tankniveau van 0%, 20 mA staat voor een tankniveau van 100%, en alles tussen 4 en 20 mA staat voor een tankniveau tussen 0% en 100%.
Als we zouden willen, kunnen we dit analoge stroomsignaal van 4-20 milliampère eenvoudig naar de externe bewakingslocatie sturen door middel van een paar koperdraden, waar het een soort paneelmeter zou aansturen, waarvan de schaal was gekalibreerd om te reflecteren de diepte van het water in de tank, in welke maateenheid dan ook die de voorkeur heeft.
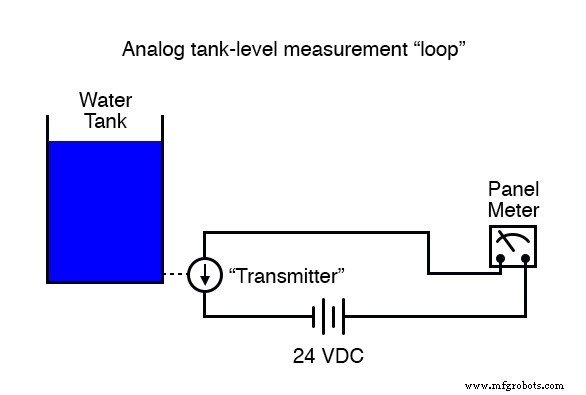
Dit analoge communicatiesysteem zou eenvoudig en robuust zijn. Voor veel toepassingen zou het perfect voldoen aan onze behoeften. Maar het is niet de enige manier om de klus te klaren.
Met het oog op het verkennen van digitale technieken, zullen we andere methoden onderzoeken om deze hypothetische tank te bewaken, ook al is de zojuist beschreven analoge methode misschien wel de meest praktische.
Het analoge systeem, hoe eenvoudig het ook is, heeft zijn beperkingen. Een daarvan is het probleem van analoge signaalinterferentie. Aangezien het waterniveau van de tank wordt gesymboliseerd door de grootte van de gelijkstroom in het circuit, wordt elke "ruis" in dit signaal geïnterpreteerd als een verandering in het waterniveau.
Zonder ruis zou een grafiek van het huidige signaal in de loop van de tijd voor een constant tankniveau van 50% er als volgt uitzien:
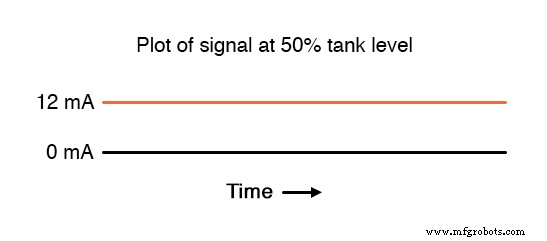
Als de draden van dit circuit te dicht bij draden met 60 Hz wisselstroom worden geplaatst, kan inductieve en capacitieve koppeling bijvoorbeeld een vals "ruis"-signaal creëren dat in dit anders gelijkstroomcircuit wordt geïntroduceerd.
Hoewel de lage impedantie van een 4-20 mA-lus (typisch 250 Ω) betekent dat kleine ruisspanningen aanzienlijk worden belast (en daardoor worden verzwakt door de inefficiëntie van de capacitieve/inductieve koppeling die wordt gevormd door de voedingsdraden), kan dergelijke ruis aanzienlijk zijn genoeg om meetproblemen te veroorzaken:
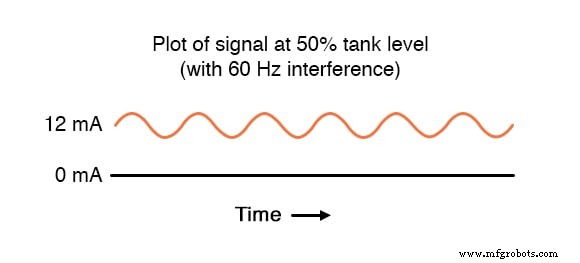
Het bovenstaande voorbeeld is een beetje overdreven, maar het concept moet duidelijk zijn:elke elektrische ruis die in een analoog meetsysteem wordt geïntroduceerd, wordt geïnterpreteerd als veranderingen in de gemeten grootheid.
Een manier om dit probleem te bestrijden is om het waterniveau van de tank te symboliseren door middel van een digitaal signaal in plaats van een analoog signaal. We kunnen dit heel grof doen door het analoge zenderapparaat te vervangen door een set waterniveauschakelaars die op verschillende hoogtes op de tank zijn gemonteerd:
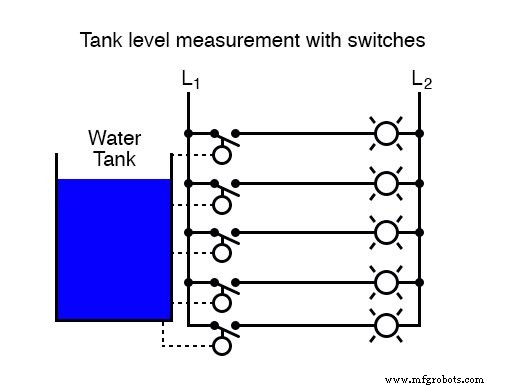
Elk van deze schakelaars is bedraad om een circuit te sluiten en stroom te sturen naar individuele lampen die op een paneel op de bewakingslocatie zijn gemonteerd. Als elke schakelaar dichtging, ging de respectievelijke lamp branden en wie naar het paneel keek, zag een weergave met 5 lampen van het niveau van de tank.
Omdat elk lampcircuit digitaal van aard is - ofwel 100% aan of 100% korting —elektrische interferentie van andere draden langs het traject heeft veel minder effect op de meetnauwkeurigheid aan de bewakingszijde dan in het geval van het analoge signaal.
Een enorme hoeveelheid interferentie nodig zou zijn om ervoor te zorgen dat een "uit"-signaal wordt geïnterpreteerd als een "aan"-signaal of omgekeerd. Relatieve weerstand tegen elektrische interferentie is een voordeel van alle vormen van digitale communicatie ten opzichte van analoge.
Nu we weten dat digitale signalen veel beter bestand zijn tegen fouten veroorzaakt door "ruis", laten we dit tankniveaumeetsysteem verbeteren. We zouden bijvoorbeeld de resolutie van dit tankmeetsysteem kunnen verhogen door meer schakelaars toe te voegen, voor een nauwkeurigere bepaling van het waterpeil.
Stel dat we 16 schakelaars installeren langs de hoogte van de tank in plaats van vijf. Dit zou onze meetresolutie aanzienlijk verbeteren, maar dit gaat ten koste van een aanzienlijk groter aantal draden dat moet worden gespannen tussen de tank en de bewakingslocatie.
Een manier om deze bedradingskosten te verminderen, zou zijn om een prioriteits-encoder te gebruiken om de 16 schakelaars te nemen en een binair getal te genereren dat dezelfde informatie vertegenwoordigde:
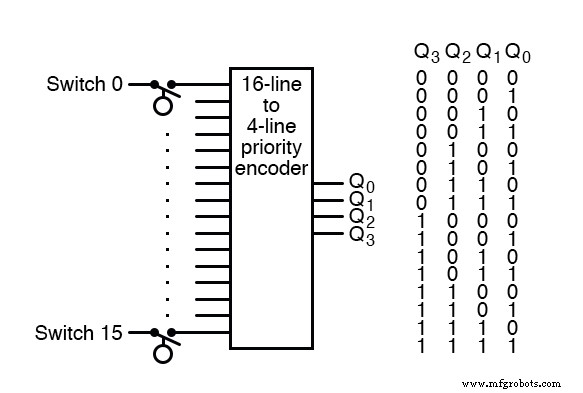
Nu zijn er slechts 4 draden (plus eventuele grond- en stroomdraden nodig) nodig om de informatie te communiceren, in tegenstelling tot 16 draden (plus eventuele grond- en stroomdraden). Op de bewakingslocatie zouden we een soort weergaveapparaat nodig hebben dat de 4-bits binaire gegevens kan accepteren en een gemakkelijk afleesbaar scherm kan genereren dat door een persoon kan worden bekeken.
Een decoder, bedraad om de 4-bits gegevens als invoer te accepteren en 1-van-16-uitgangslampen te verlichten, kan voor deze taak worden gebruikt, of we kunnen een 4-bits decoder/stuurprogramma-circuit gebruiken om een soort numeriek cijfer aan te sturen weergeven.
Toch is een resolutie van 1/16 tankhoogte mogelijk niet goed genoeg voor onze toepassing. Om het waterniveau beter op te lossen, hebben we meer bits nodig in onze binaire uitvoer. We zouden nog meer schakelaars kunnen toevoegen, maar dit wordt al snel onpraktisch.
Een betere optie zou zijn om onze originele analoge zender opnieuw aan de tank te bevestigen en de analoge uitgang van 4-20 milliampère elektronisch om te zetten in een binair getal met veel meer bits dan praktisch zou zijn met een set discrete niveauschakelaars.
Aangezien de elektrische ruis die we proberen te vermijden, wordt aangetroffen langs de lange draad van de tank naar de bewakingslocatie, kan deze A/D-conversie plaatsvinden bij de tank (waar we een "schoon" 4-20 mA-signaal hebben ). Er zijn verschillende methoden om een analoog signaal naar digitaal te converteren, maar we slaan een diepgaande bespreking van die technieken over en concentreren ons op de digitale signaalcommunicatie zelf.
Het type digitale informatie dat van onze tankinstrumentatie naar de monitoringinstrumentatie wordt verzonden, wordt parallel genoemd. digitale gegevens. Dat wil zeggen, elke binaire bit wordt via zijn eigen speciale draad verzonden, zodat alle bits tegelijkertijd op hun bestemming aankomen.
Dit vereist uiteraard het gebruik van ten minste één draad per bit om te communiceren met de bewakingslocatie. We zouden onze bedradingsbehoeften verder kunnen verminderen door de binaire gegevens langs een enkel kanaal te sturen (één draad + aarde), zodat elk bit één voor één wordt gecommuniceerd. Dit type informatie wordt serieel genoemd digitale gegevens.
We zouden een multiplexer of een schuifregister kunnen gebruiken om de parallelle gegevens van de A/D-converter (bij de tankzender) te nemen en deze om te zetten in seriële gegevens. Aan de ontvangende kant (de bewakingslocatie) zouden we een demultiplexer of een ander schuifregister kunnen gebruiken om de seriële gegevens weer naar parallel te converteren voor gebruik in het weergavecircuit.
De exacte details van hoe de mux/demux- of schuifregisterparen gesynchroniseerd worden gehouden, is, net als A/D-conversie, een onderwerp voor een andere les. Gelukkig zijn er digitale IC-chips, UART's (Universal Asynchronous Receiver-Transmitters) genaamd, die al deze details zelf verwerken en het leven van de ontwerper veel eenvoudiger maken.
Vooralsnog moeten we onze aandacht blijven richten op het onderwerp:hoe de digitale informatie van de tank naar de bewakingslocatie te communiceren.
GERELATEERDE WERKBLAD:
-
Werkblad digitale communicatie
Industriële technologie
- Inleiding tot DC-circuits
- Inleiding tot AC-circuits
- Inleiding tot discrete halfgeleidercircuits
- Inleiding tot analoge geïntegreerde schakelingen
- Inleiding tot SPICE
- Inleiding tot Booleaanse algebra
- Inleiding tot Karnaugh Mapping
- Praktische overwegingen - Digitale communicatie
- Waarom digitaal?
- Inleiding tot harmonischen:deel 1
- IoT draadloze oplossing voor het bewaken van propaantankniveau