


MEMS IMU's van de volgende generatie — Hoge prestaties, schaalbaar
Om erachter te komen wat de toekomst is voor MEMS-autonavigatiesystemen, interviewde ik Yang Zhao, CEO, en Teoman Ustun, VP Marketing en Business Development, ACEINNA, Inc. (Boston, MA).
Tech Briefs: Waarom noemen jullie ACEINNA IMU's de volgende generatie?
Yang Zhao: In ideale omstandigheden navigeer je een auto met één camera. Maar om altijd veiligheid en beschikbaarheid te bereiken, vertrouwen autonome voertuigen steeds meer op aanvullende sensortechnologieën. Die sensoren zoals Vision, Radar, Lidar, GNSS, RTK kunnen in bepaalde situaties echter allemaal worden verblind. IMU is de enige sensor die blijft werken, zelfs als alle andere sensoren uitvallen. Onze uitdaging is om de hoeveelheid tijd te vergroten waarvoor gegist bestek met de IMU betrouwbaar zal zijn. Het huidige product dat we hebben lijkt meer op een high-end industrieel niveau, maar is ontworpen om te worden verwerkt in passagierskaarten.
Teoman Ustun: De revolutionaire MEMS-technologie die we ontwikkelen, zal de prestaties van een glasvezelgyro bereiken tegen de prijs van een silicium MEMS-oplossing. Dat is in feite een baanbrekende technologie.
Met elke generatie hebben we de prestaties van onze IMU verbeterd in termen van Angular Random Walk (ARW), bias-instabiliteit en trillings-/schokbestendigheid. Met deze nieuwste generatie hebben we ook een driedubbele redundante architectuur toegevoegd, wat om twee redenen enorm belangrijk is. Het verbetert de betrouwbaarheid op autoniveau en verhoogt ook de prestaties van de IMU. Voor zover ik weet, hebben we bijvoorbeeld de enige ASIL-B ISO 26262 (Automotive Safety Integrity Level) gekwalificeerde INS (traagheidsnavigatiesysteem) geïntegreerd met drievoudig redundante IMU op de markt. Deze kwalificatie geeft autoklanten in feite het vertrouwen dat onze sensor gedurende de hele levensduur van het voertuig robuuste gegevens zal genereren.
Onze nieuwste IMU's hebben ook open architectuurfuncties waarmee onze klanten hun knowhow kunnen benutten of hun geheime saus in onze hardware kunnen implementeren.
Zhao: IMU's van ruimtevaartkwaliteit hebben een uitstekende stabiliteit, maar zijn groot, zwaar en duur - zie afbeelding 1 voor een vergelijking van de verschillende IMU-kwaliteiten. We streven ernaar een IMU-systeem op de markt te brengen dat de navigatiegraad benadert. Tegenwoordig kun je IMU's van navigatiekwaliteit krijgen, maar ze gebruiken allemaal glasvezelgyroscopen en bevinden zich in de prijsklasse van tienduizenden dollars. Ze zijn groot, zwaar en duur, maar in de luchtvaart en het leger is dat geen dodelijke factor.
Maar als je het hebt over het gebruik van een IMU in een auto, zou niemand dat soort geld betalen. Wat we dus proberen te doen, is het ontwikkelen van een nieuwe generatie MEMS IMU-technologie die prestaties van navigatiekwaliteit kan bereiken, die de prestatieniveaus van glasvezelgyro's kunnen benaderen. In tegenstelling tot anderen die zich aanvankelijk richtten op IMU's van consumentenkwaliteit en deze nu proberen te verschuiven naar toepassingen met hogere prestaties, zijn we begonnen met hoogwaardige industriële toepassingen in het achterhoofd, om de vereisten voor onze autosensor vast te stellen.
De meest recente autoproducten die we hebben geïntroduceerd, zijn kosteneffectief. Ze zijn van onderaf ontworpen en ontwikkeld om een prijs/prestatie-optimalisatie te hebben voor toepassingen met een hoog volume. We streven naar een prijs van minder dan $500 en uiteindelijk zelfs nog minder.
Tech Briefs: Kunt u enkele functies uitleggen die de nauwkeurigheid, stabiliteit en betrouwbaarheid van uw nieuwe IMU verbeteren?
Ustun: Allereerst hebben onze IMU-sensoren driedubbele redundantie:er zijn drie versnellingsmeters en drie gyroscopen. We bewaken alle kritische parameters, inclusief spanningen, stromen en temperaturen, evenals de prestaties van individuele IMU's. Met deze drievoudige redundantie kunnen we continue zelftesten implementeren. We krijgen een goed vertrouwen over de prestaties van de gyro en versnellingsmeter door deze drievoudige gegevensstroom te vergelijken en te contrasteren.

We hebben ook zes vrijheidsgraden:de drie versnellingsmeters en drie gyroscopen meten de XYZ-assen. De gyroscopen meten de rotatiesnelheid, die, wanneer geïntegreerd, verandering in hoekpositie geeft. De accelerometer meet de versnelling, die bij integratie snelheid geeft en bij integratie weer positie. Door gyrogegevens en versnellingsmetergegevens te verwerken en filters en algoritmen te gebruiken die zijn geoptimaliseerd voor een bepaalde toepassing, krijgen we echt nauwkeurige hoekgegevens voor rollen, stampen en gieren (zie afbeelding 2). De meest kritische gegevens voor een autotoepassing zijn gier, wat aangeeft in welke mate de auto afdrijft. Pitch geeft aan of je een heuvel op of af gaat. Hopelijk zie je nooit een rol in je auto.
Tech Briefs: Wat voor soort nauwkeurigheid zou je kunnen volhouden gedurende welke periode?
Ustun: Dat is heel moeilijk te zeggen omdat het van zoveel verschillende scenario's afhangt. Momenteel moeten we nauwkeurigheid op rijstrookniveau bereiken. Een rijstrook is ongeveer drie meter breed en een personenauto is ongeveer twee meter breed. Omdat je zeker wilt weten dat je niet buiten de rijstrook gaat, heb je ongeveer plus of min een halve meter voordat je te ver afdrijft. Bij typische autosnelheden kon in minder dan een seconde een correctie van een halve meter worden bereikt. Aangezien u volgens gegist bestek de vereiste nauwkeurigheid 60 tot 90 seconden kunt behouden, kan onze IMU gemakkelijk een auto binnen zijn rijstrook houden.
Tech Briefs: Een IMU geeft u dus relatieve nauwkeurigheid. Hoe zit het met absolute nauwkeurigheid?
Ustun: Absolute locatiegegevens worden over het algemeen afgeleid van een GNSS-signaal. Historisch gezien was de positienauwkeurigheid van GNSS-ontvangers een meter of meer. GNSS op zich is dus niet goed genoeg voor de vereiste nauwkeurigheid op rijbaanniveau van 2 cm.
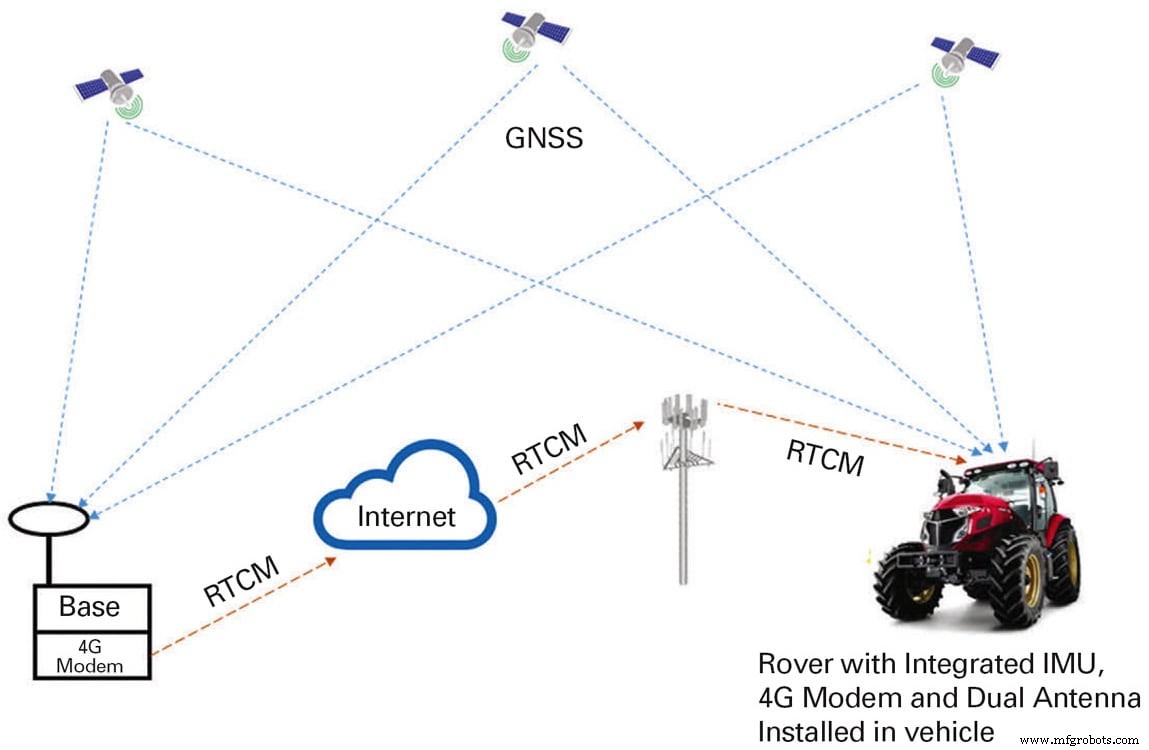
Real-Time Kinematics (RTK) is een techniek om de positienauwkeurigheid van een GNSS-ontvanger te verbeteren. Het maakt gebruik van een netwerk van basisstations die correcties kunnen verzenden naar onze in het voertuig gemonteerde RTK-positioneringsengine, die ze gebruikt om de positie nauwkeuriger te herberekenen.
RTK is een dienst die u uit vele bronnen kunt kopen of waarop u zich kunt abonneren. Wat we steeds vaker zien, is de communicatie-infrastructuur - zelfs telecomserviceproviders zoals Verizon, Softbank of China Mobile - zijn begonnen met het aanbieden van RTK-services. Vanuit ons productperspectief zijn we agnostisch ten opzichte van de serviceprovider - we zijn van plan al deze RTK-serviceproviders te ondersteunen om onze klanten te helpen de nauwkeurigheidslimieten te bereiken waarnaar ze op zoek zijn. We bieden een oplossing die zowel hardware als software is.
Hoewel we de service niet bieden, stellen we onze klanten in staat om degene te kiezen die het meest geschikt voor hen is. We kwalificeren deze services echter eerst. We zorgen ervoor dat ze compatibel zijn met onze hard- en software. En dan zetten we het op onze website om klanten de flexibiliteit te geven om te kiezen uit een lijst met serviceproviders. Meestal wordt RTK geleverd als een service via een 4G LTE-netwerk. Als er geen 4G LTE-ontvangst is, zijn er alternatieve manieren om de correctiesignalen te ontvangen, zoals communicatie via satelliet.
Voor RTK zet je basisstations over een netwerk:er is een vuistregel dat je basisstations meestal in een straal van 80 kilometer plaatst. Deze basisstations zijn zo gepositioneerd dat hun locatie zeer nauwkeurig bekend is. Correcties worden gegenereerd door de fout te meten tussen het GNSS-signaal en de nauwkeurig bekende locatie van een basisstation.
We hebben dus een uitgebreide oplossing:een traagheidsnavigatiesysteem dat onze drievoudig redundante, hoogwaardige IMU met zes vrijheidsgraden omvat, gekoppeld aan een GNSS-ontvanger met dubbele frequentie, in twee verschillende vormfactoren. Een daarvan is een modulevormfactor. Als de klant dat in zijn eigen Engine Control Unit (ECU) wil reflowen, kan hij dat doen, of anders kunnen ze onze plug-and-play-pakketoplossing gebruiken. Kortom, u sluit gewoon de GPS/GNSS-antenne aan en het systeem werkt op CAN-bus of Ethernet.
Dit artikel is geschreven door Ed Brown, redacteur van Sensor Technology. Voor meer informatie, bezoek hier .
Sensor
- VersaLogic brengt Xeon-gebaseerde, krachtige embedded computer uit
- Lanxess' High Performance Materials Business Unit wordt juridisch onafhankelijk
- HDPE-technologie met hoge vochtbarrière voor flexibele meerlaagse verpakkingen
- In-Mold Labeling:hoge prestaties tegen lagere kosten
- Hoogwaardige spuitgegoten aluminiumlegering DISPAL S220 F
- Hoogwaardige spuitgegoten aluminiumlegering DISPAL S220 O
- Hoogwaardige spuitgevormde aluminiumlegering DISPAL S225 F
- Hoogwaardige spuitgevormde aluminiumlegering DISPAL S232 T6
- Hoogwaardige spuitgevormde aluminiumlegering DISPAL S232 T6x
- Hoogwaardige spuitgegoten aluminiumlegering DISPAL S250 F
- Hoogwaardige spuitgegoten aluminiumlegering DISPAL S260 F