


Slimme steden:het pleidooi voor lidar in intelligente transportsystemen
Een aspect van de agenda voor slimme steden is de inzet van intelligente vervoerssystemen. Een proefproject met lidar-sensoren bij de San Francisco Municipal Transportation Agency (SFMTA) heeft aangetoond hoe lidar een oplossing heeft geboden voor de proef met slimme verkeerslichten van de stad, een onderdeel van het Vision Zero-beleid van San Francisco.
Het doel van het Vision Zero-beleid van de stad is het verbeteren van de verkeersveiligheid, aangezien men denkt dat elk jaar ongeveer 30 mensen het leven verliezen en meer dan 200 ernstig gewond raken tijdens het reizen door de straten van San Francisco. Het doel van de pilot voor slimme verkeerssignalen binnen dit grotere raamwerk was om het gebruik van multimodale intelligente verkeerssignaalsystemen (MMITSS), speciale korteafstandscommunicatie (DSRC), transitsignaalprioriteit (TSP) en preëmptie van noodvoertuigen (EVP) te onderzoeken. ) technologie om prioriteit te geven aan nood- en transitvoertuigen. Daarnaast moet de MMITSS ook voetgangers en fietsen kunnen detecteren om hen voorloopintervallen, scrambles en/of beveiligde fasering te bieden.
De eerste proof of concept die eindigde in januari 2020, maakte gebruik van lidar-sensoren op vijf kruispunten en toonde het vermogen aan om nauwkeurig en anoniem gegevens te profileren, met een nauwkeurigheid van 96%. De tweede proof of concept verwacht de datalaag toe te voegen aan het signaalcontrolenetwerk om de ‘intelligentie’ in ITS mogelijk te maken; dit is aan de gang en zal naar verwachting begin 2021 worden afgerond.
We spraken twee betrokkenen die hun licht wierpen op de technologie, de inzet en de verkregen resultaten, en hier presenteren we hoogtepunten van de gesprekken. Eerst spraken we met de lidar-sensortechnologieleverancier Quanergy's chief marketing officer, Enzo Signore. Daarna gingen we dieper in op het daadwerkelijke proof of concept-project met Paul Hoekstra, die de onafhankelijke strategie-uitvoeringsadviseur was voor het project met SFMTA.
Lidar:anoniem bijhouden van ID's van objecten
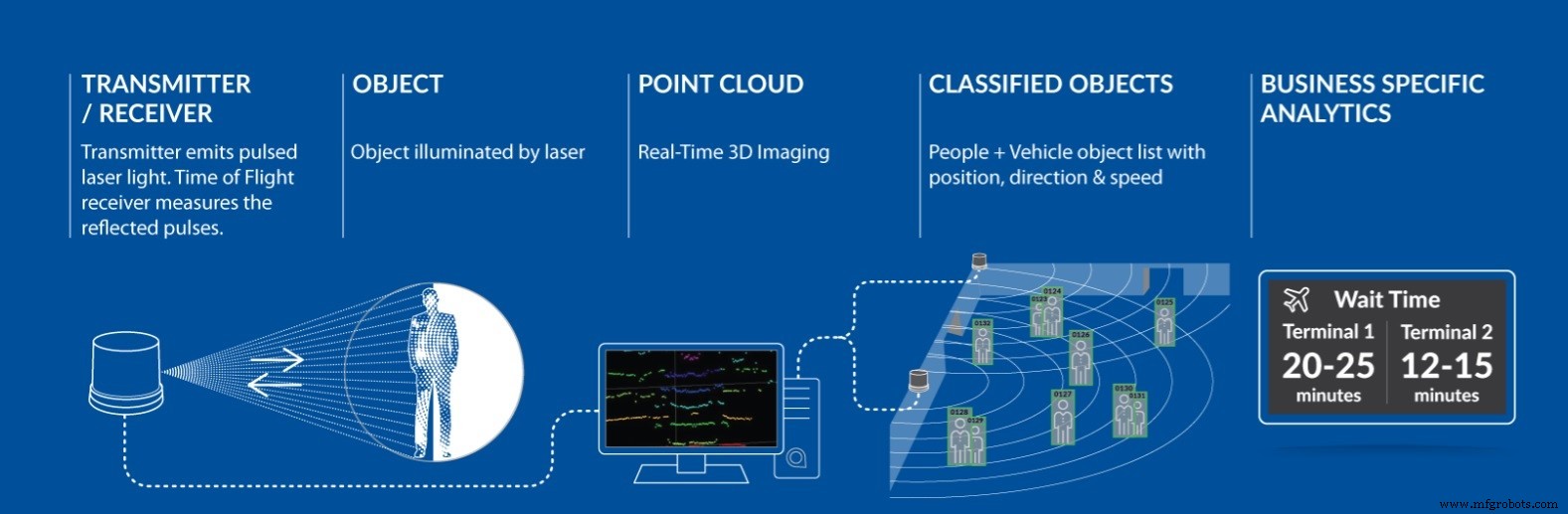
Enzo Signore van Quanergy legt het voordeel uit van lidar-technologie in dit soort toepassingen, waarbij mensen en voertuigen moeten worden geteld en stroombeheer, en vooral met het verbod op gezichtsherkenning.
De belangrijkste waardepropositie voor lidar-technologie in toepassingen zoals stadions en slimme steden is de mogelijkheid om anoniem een object te volgen dat over verschillende sensorpunten reist. Een auto zou bijvoorbeeld door veel kruispunten gaan, of een voetganger door veel gebieden. Wat Quanergy kan doen, is een ID toewijzen aan een object, en dat ID blijft gedurende de hele reis bij het object in het bewaakte gebied.
Dit is erg complex om te doen, want als je door meerdere kruispunten gaat, heb je meerdere sensoren en meerdere servers nodig voor de edge compute. De meeste technologieën zouden een silobeeld hebben van alleen het gebied dat ze beheren, en bij het overschrijden van de grens tussen het ene gebied en het andere, zou de ID verloren gaan en zou je een andere ID krijgen. Met deze aanpak begin je de stroom van mensen uit het oog te verliezen.
We hebben een technologie genaamd geautomatiseerde ID-overdracht, die de ID van de persoon of het voertuig doorgeeft van het ene gebied naar het andere. Dus zolang we een gezichtsveld hebben, blijft dezelfde ID bij het object. Dit geeft een zeer goede end-to-end zichtbaarheid en tracking. Dit kan van belang zijn voor luchthavens, bijvoorbeeld van curb tot gate, waar je de passagierservaring zou kunnen optimaliseren, en voor winkelcentra en steden. De enkele ID voor elk individu helpt bij het mogelijk maken van end-to-end analyses.
De sensoren van Quanergy, de M-serie, bieden detectie op grote afstand, zoals de MQ-8, die speciaal is ontworpen voor toepassingen voor stroombeheer. Hier is hoe deze sensoren anders zijn. Typische lidar-sensoren hebben een symmetrische bundelconfiguratie. Als u de sensor plat monteert, gaat meestal de helft van de straal naar de lucht en de helft van de straal naar de grond. Als het 3 meter hoog op een straatlantaarnpaal is gemonteerd en naar beneden kijkt voor het voetgangerszicht, wordt in deze configuratie de helft van de straal verspild.
In ons ontwerp zijn alle balken eigenlijk naar beneden gericht, wat de mogelijkheid geeft om een symmetrische dekking van de grond te hebben. Dat betekent dat er geen blinde vlekken zijn wanneer een persoon over het gezichtsveld loopt. Dit geeft de mogelijkheid om zonder onderbreking een persoon of voertuig overal in het gezichtsveld te volgen. We kunnen een object zien tot een afstand van 70 meter (dwz:15.000 vierkante meter). Dit is een zeer groot gebied waarvoor anders veel camera's nodig zouden zijn om een vergelijkbare dekking te bereiken. Dit vermindert dus het aantal sensoren en ook de kosten.
Privacyproblemen met gezichtsherkenning oplossen
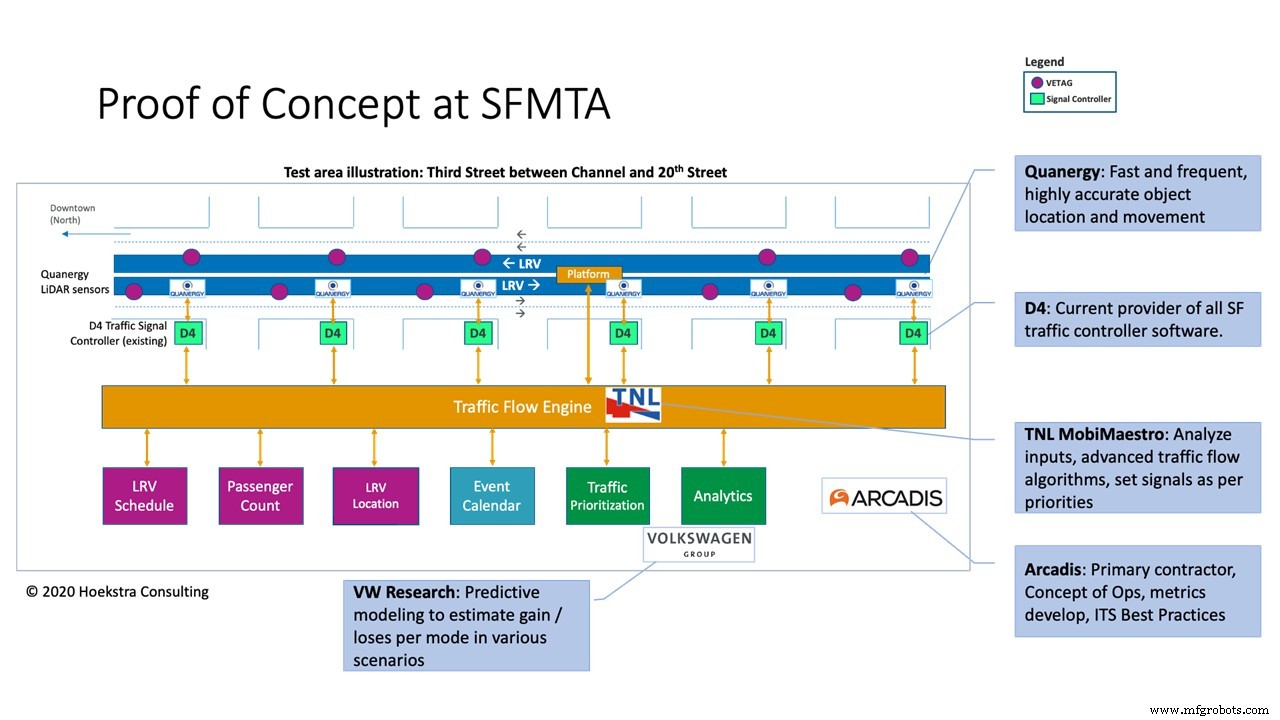
Paul Hoekstra, voor SMTA , beschrijft de gedachte achter de implementatie en de uitkomst van de eerste proof of concept (PoC) over vijf kruispunten op 3 rd Straat en plannen voor uitbreiding van de dekking.
We zijn in april 2019 begonnen met de samenwerking met SFMTA, Cisco en Quanergy als partners voor dit project. Aanvankelijk hadden we als onderdeel van het Cisco-pakket DSRC-sensoren. We ontdekten dat we ze alleen gebruikten om te luisteren naar alle auto's in de gang en op de snelweg die we aan het afdekken waren. We ontdekten dat minder dan 1% van alle auto's dat DSRC-signaal daadwerkelijk uitzendt. Vanuit dit use case perspectief moet de conclusie zijn dat je DSRC niet kunt gebruiken voor verkeersstroommeting. Het is gewoon niet belangrijk genoeg om beslissingen over te nemen.
Op dit moment hebben we nu de eerste (PoC) met Quanergy-sensoren voltooid en nu zitten we midden in de tweede PoC.
Met de eerste PoC hebben we 20 lidar-sensoren genomen, deze op vijf kruispunten op 3 de geïnstalleerd Street, vlakbij het nieuwe basketbalstadion dat vorig jaar werd geopend. We hadden edge-computing met Cisco TRX met de Quanergy QORTEX-software. Gegevens van de lidar gaan via de TRX-box en de Qortex-software publiceert de gegevens naar het netwerk, dat naar het datacenter gaat, een klein VM-cluster met Cisco Kinetic-platform dat alle berichten opslaat - allemaal 30 miljoen per week.
Elke zondag worden er rapporten op gepubliceerd, één voor de voertuigen, het voertuig identificerend aan de hand van de lidar-ID op de kruising, met een hele reeks attributen, zoals tijd, dag van de week, waar kwam het vandaan, waar ging het heen, hoe vaak was er een stop, hoe lang was de stop, wat was de snelheid, was er een evenement (uit de evenementenkalender). Zo konden we alle kruispunten met elkaar verbinden en voertuigen door de gang volgen. En dan zouden we dingen kunnen zeggen als:"Dit is het bedrag dat in noordelijke richting is binnengekomen aan de zuidkant van de gang, en hoeveel er vervolgens zijn uitgestapt, enzovoort".
Met Quanergy's QORTEX hebben we het gekalibreerd en hebben we een nauwkeurigheid van 96% bereikt. Je kunt niet alleen ID's tellen met de lidar; je moet logica bouwen om ervoor te zorgen dat dezelfde ID zich in de uitgang bevindt als in de ingang. Met die logica kunnen we de auto's volgen door het kruispunt. We hebben logica die definieert wat een stop is. Vandaar dat we met een nauwkeurigheid van 96% zijn beland, het is heel precies. Voor voetgangers kun je met de door ons gedefinieerde zones zien of de persoon zich op of naast de stoeprand bevindt. U kunt zien of een persoon zich binnen of buiten de grenzen van een zebrapad bevindt. U kunt zien hoe dicht een auto bij de persoon was. Met dat soort gegevens kunnen we rapporten maken van bijna-ongevallen. We hebben gedefinieerd wat bijna-ongevallen zijn:de vectoren, de snelheid, en berekenen dan de tijd die ze nodig hebben om te botsen, en of het binnen een bepaald bereik is, dan noem je het een bijna-ongeval.
Dit is alleen mogelijk omdat de gegevens die uit QORTEX komen zo nauwkeurig zijn, dat we kunnen zien zonder ooit iemand te hoeven identificeren. We slaan geen identificeerbare persoonlijke informatie op. Een mens is maar een punt. En een auto is maar een blok, je weet niet wat voor auto het is. We classificeren op basis van maat.
De eerste PoC ging helemaal over analyse. In de tweede breiden we het aantal kruispunten uit. Dus nu hebben we er vijf, en we gaan naar 10. Met andere woorden, een grotere gang.
We zullen dan alle gegevens die momenteel in de kasten zijn opgesloten, in lagen plaatsen. In de kasten bevindt zich een signaalcontroller en op de controller bevinden zich veel actuatoren. Dit kunnen lusdetectie zijn van een voertuig, een voetgangersdrukknop of sensoren in de lightrail. Er is prioritering van verkeerslichten. Dit alles zit in de ingebouwde signaalcontroller.
Dus wat we nu doen, is informatie-uitwisseling in twee richtingen mogelijk maken met de signaalcontrollers, waarbij alle gegevens van de kruispunten, zoals de lidar-gegevens en objectclassificatie (wederom volledig anoniem), op de perrons en de bushaltes. De objectclassificatie van die sensoren (die allemaal op de sensoren worden verwerkt), geeft ons het aantal mensen, evenals hun classificatie - bijvoorbeeld zit er iemand in een rolstoel, zijn er mensen die een kinderwagen duwen, of zijn ze een fiets hebben. Veel van deze factoren bepalen de verblijftijd van het transitvoertuig. We willen de voorspelde verblijftijd weten op basis van hoeveel mensen er zijn.
Uit het back-end systeem gaan we het aantal voertuigen pakken. En dan kunnen we met de analyses bepalen of we bijvoorbeeld 20 seconden verblijftijd of 32 seconden verblijftijd nodig hebben. We kunnen dan alle 10 kruispunten extrapoleren,
De hele transportcorridor als een netwerk behandelen
Om de hele gang te optimaliseren, kunnen we niet zonder precies te weten waar mensen en voertuigen zijn en voor hoe lang. Dit betekent dat we de hele corridor als een netwerk behandelen, niet als een individueel knooppunt. Dit betekent dat we de algoritmen met hoge frequentie doorlopen, en nu we debatteren of we sneller dan 1 hertz moeten gaan, herberekenen we alles elke seconde.
Dan zeggen we tegen de seinwachter dat je op groen gaat in noordelijke richting. Dat sluit de cirkel. Lerend van het supply chain-werk van Cisco, weet je dat dat de enige manier is om dingen door de kruising te verplaatsen. Alle technologie is beschikbaar, maar het optimaliseert alleen alle silo's. Op deze manier maken we een enorme sprong voorwaarts met een nieuw paradigma, van geïntegreerd verkeersmanagement.
Er zijn al 7.000 camera's in San Francisco. Maar camera's geven je alleen een 2D-beeld. De precisie van de locatie is minder nauwkeurig dan wat je met lidar kunt bereiken. Lidar werkt altijd, bij regen, 's nachts. En het blijft erg ver weg van de privacykwesties. Op het moment dat mensen weten dat ze worden gevolgd, of dat ze kunnen worden herkend, is er het probleem dat mensen geen vertrouwen hebben in de overheid om hen te beschermen.
De resultaten van dit project zijn dat hulpverleningsvoertuigen voorrang krijgen bij het omgaan met noodsituaties, het optimaliseren van transittijden en haltes, en zelfs het platoonen van auto's als er geen openbaar vervoer beschikbaar is, om ze effectiever door de gang te verplaatsen.
Sensor
- Pleidooi voor neuromorfe chips voor AI-computing
- De C-suite case voor DDMRP
- Wi-Fi:het wondermiddel voor Smart Everything
- De kracht van slimme steden benutten voor een betere toekomst
- De zaak om Amerikaanse productie naar huis te halen
- Bedrijven stellen deadlines voor intelligente systemen
- De zaak voor 3D-printen in de productie
- De terugverdientijd vinden voor slimme productie
- Materiaal voor de volgende generatie slimme sensoren
- Software voor de slimme fabriek:de voordelen van hardware-onafhankelijke software
- Hydraulische systemen en de behoefte aan onderhoud