


Digitale (AAN/UIT) Hall Effect-apparaten:schakelaars en vergrendelingen
Lees meer over de polariteit van het B-veld, unipolaire schakelaars, omnipolaire schakelaars, Hall-effectvergrendelingen en bipolaire schakelaars in dit technische artikel.
Hall-effectschakelaars en vergrendelingen zijn magnetische veldvergelijkers. Ze vergelijken de magnetische fluxdichtheid, ook wel het B-veld genoemd, met enkele vooraf gespecificeerde drempels en geven het vergelijkingsresultaat af als een 1-bit digitale waarde. Er zijn vier verschillende categorieën digitale (aan/uit) Hall-sensoren:unipolaire schakelaars, bipolaire schakelaars, omnipolaire schakelaars en vergrendelingen.
We zullen de overdrachtsfunctie van elk type in detail onderzoeken. Maar eerst wil ik een belangrijk concept verduidelijken dat vaak in onze discussie zal worden gebruikt:de polariteit van de magnetische fluxdichtheid.
Hoe definiëren we de polariteit van het B-veld?
Een Hall-effectapparaat is directioneel. Het detecteert alleen de component van de magnetische fluxdichtheid die zich langs de gevoeligheidsas bevindt. Afbeelding 1 toont de gevoeligheidsas van twee gangbare Hall-apparaatpakketten.
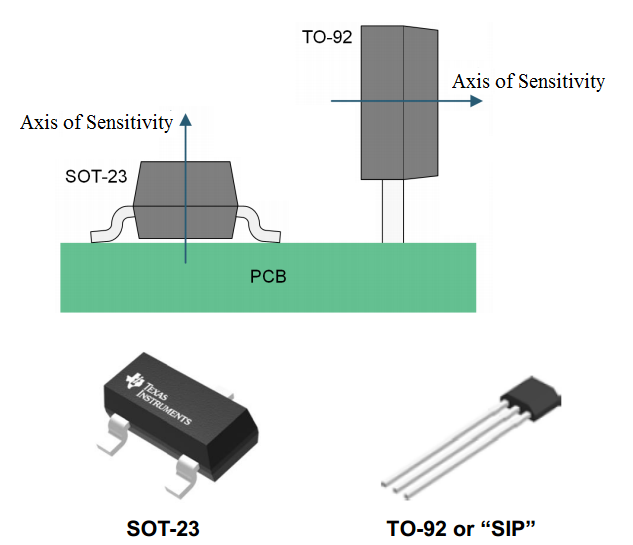
Figuur 1. Afbeelding met dank aan Texas Instruments.
Als het op het apparaat aangelegde magnetische veld een component in de richting van de gevoeligheidsas produceert, wordt aangenomen dat het B-veld positief is. Als het veld een component produceert in de tegenovergestelde richting van de gevoeligheidsas, wordt aangenomen dat deze negatief is. Figuur 2 toont een voorbeeld waarbij de magnetische fluxdichtheid een negatieve polariteit heeft op de sensorlocatie (A).
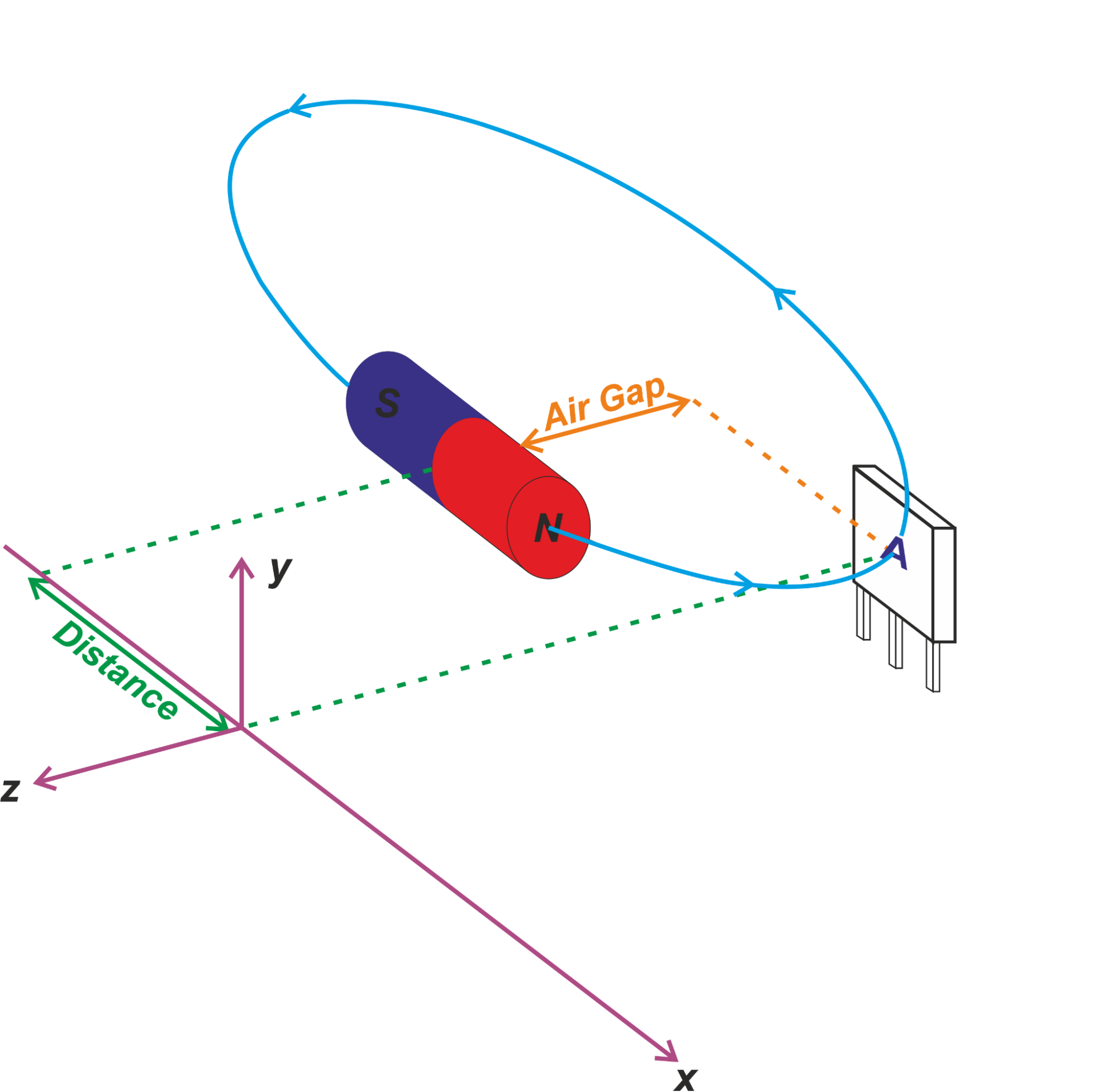
Figuur 2
In het bovenstaande voorbeeld nemen we aan dat de gevoeligheidsas van het apparaat zich in de richting van de z-as bevindt. Aangezien de magnetische veldlijnen van een magneet van de noordpool naar de zuidpool gaan, is het door het apparaat waargenomen B-veld negatief.
Er is ook een conventie met betrekking tot de B-veldpolariteit die vaak wordt gebruikt door fabrikanten van Hall-sensoren. Ze beschouwen het magnetische veld dat door een magneet-zuidpool wordt geproduceerd als positief en dat van de noordpool als negatief. Dit is gebaseerd op de veronderstelling dat het merkvlak van de sensor naar de magneet is gericht. Het gemerkte oppervlak is het vooroppervlak van de sensor waar u het onderdeelnummer van het apparaat enz. kunt vinden. Gezien de gevoeligheidsassen die in afbeelding 1 worden getoond, kunt u controleren of het presenteren van de zuidpool van de magneet aan het gemerkte oppervlak van de sensor zal leiden tot een magnetisch veld in de richting van de gevoeligheidsas (positief veld). Evenzo zal een noordpool een negatief magnetisch veld creëren. Als we de magneetpolen aan de achterkant van de sensorverpakking presenteren (niet de merkzijde van de verpakking), is de bovenstaande conventie niet meer geldig!
Een laatste opmerking om deze discussie af te ronden:veel Hall-apparaten zijn eendimensionaal en voelen het B-veld langs slechts één gevoeligheidsas (zoals die in figuur 1). Er zijn echter meer geavanceerde sensor-IC's die meer dan één Hall-element gebruiken om drie gevoeligheidsassen te ondersteunen (een driedimensionale sensor). Laten we nu eens kijken naar de overdrachtsfunctie van de verschillende soorten digitale (aan/uit) Hall-apparaten.
Unipolaire schakelaars
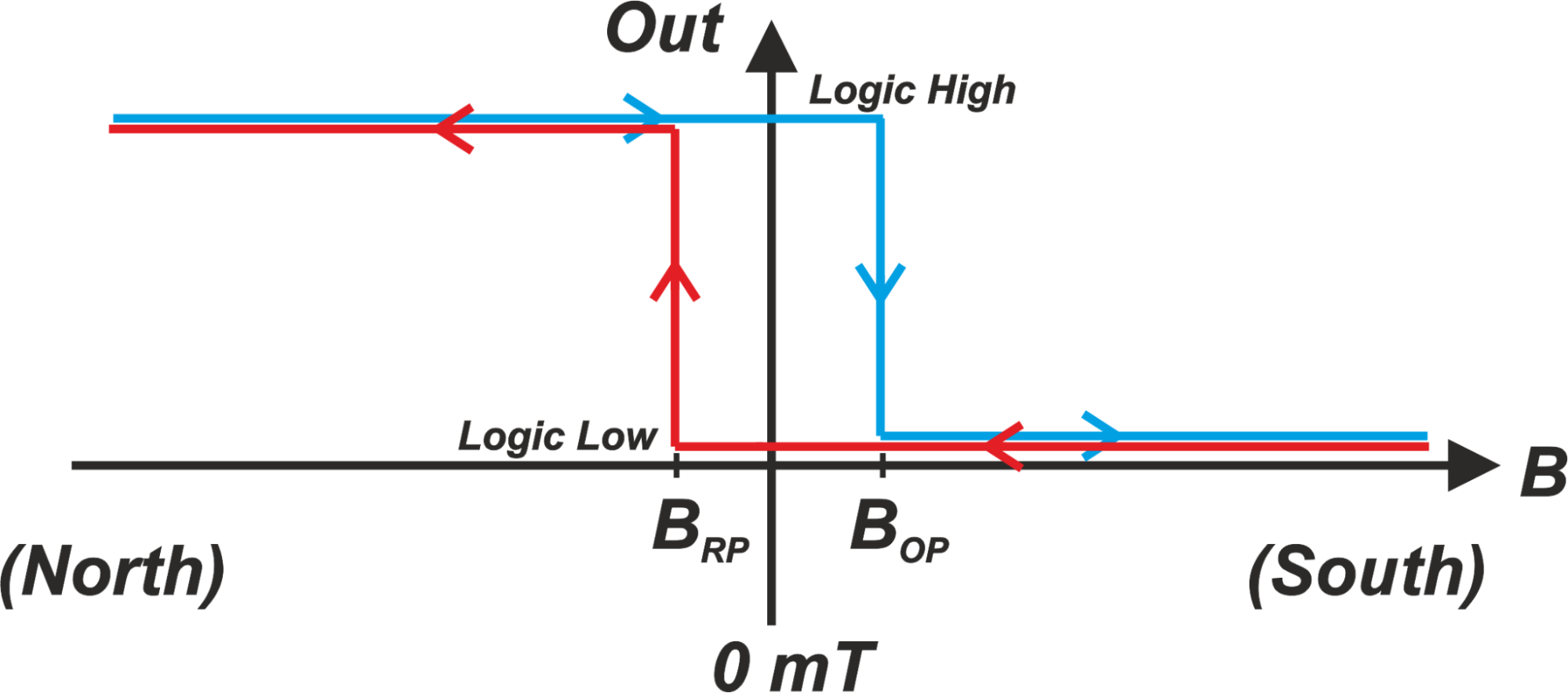
De functionaliteit van een unipolaire schakelaar wordt geïllustreerd in figuur 3.
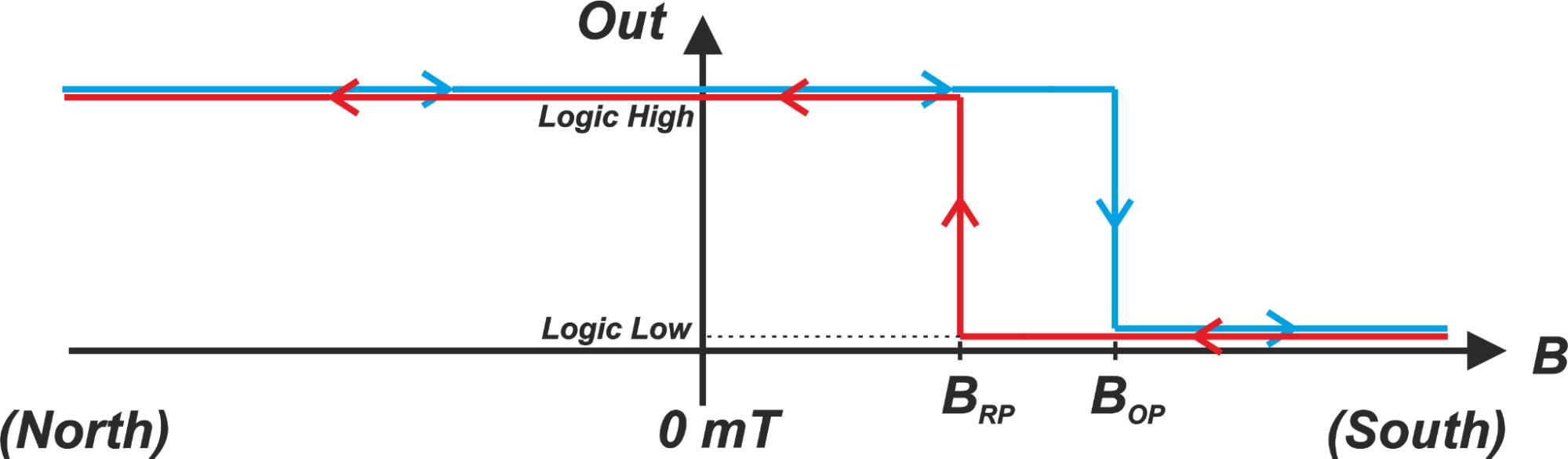
Figuur 3
Dit apparaat wordt een unipolaire schakelaar genoemd omdat de schakeldrempels (BRP en BOP ) bevinden zich in het positieve gebied van de B-veldas. De uitgangstoestand kan alleen veranderen als reactie op een veld met zuidpolariteit. Een noordpolariteit of negatief veld heeft geen effect op de sensor; uitleg van de naam "unipolaire schakelaar".
Laten we eens kijken hoe het apparaat reageert op veranderingen in het magnetische veld. Neem aan dat er een noordpolariteitsveld op de sensor wordt aangelegd en dat we het aangelegde veld geleidelijk vergroten (positiever maken). Voor B
Hoe reageert het geactiveerde apparaat op een afnemend veld? Voor een afnemend magnetisch veld blijft het apparaat aan (logisch laag) totdat het aangelegde magnetische veld kleiner wordt dan BRP . Dit wordt weergegeven door de rode curve in de bovenstaande afbeelding. Voor B
De schakeldrempel voor een toenemend magnetisch veld verschilt dus van de schakeldrempel voor een afnemend veld. Deze hysterese is met opzet ontworpen om een zuivere schakeling aan de uitgang te hebben. Mechanische trillingen in een Hall-effectdetectiesysteem en elektrische en elektromagnetische ruis kunnen ruis in het gedetecteerde magnetische veld introduceren. De B-veldruis rond de drempelniveaus kan leiden tot onbepaalde, snel veranderende fluctuaties aan de uitgang van de Hall-sensor (Figuur 4). Deze ongewenste fluctuaties worden verwijderd door de drempels van de stijgende en dalende velden iets anders te maken.
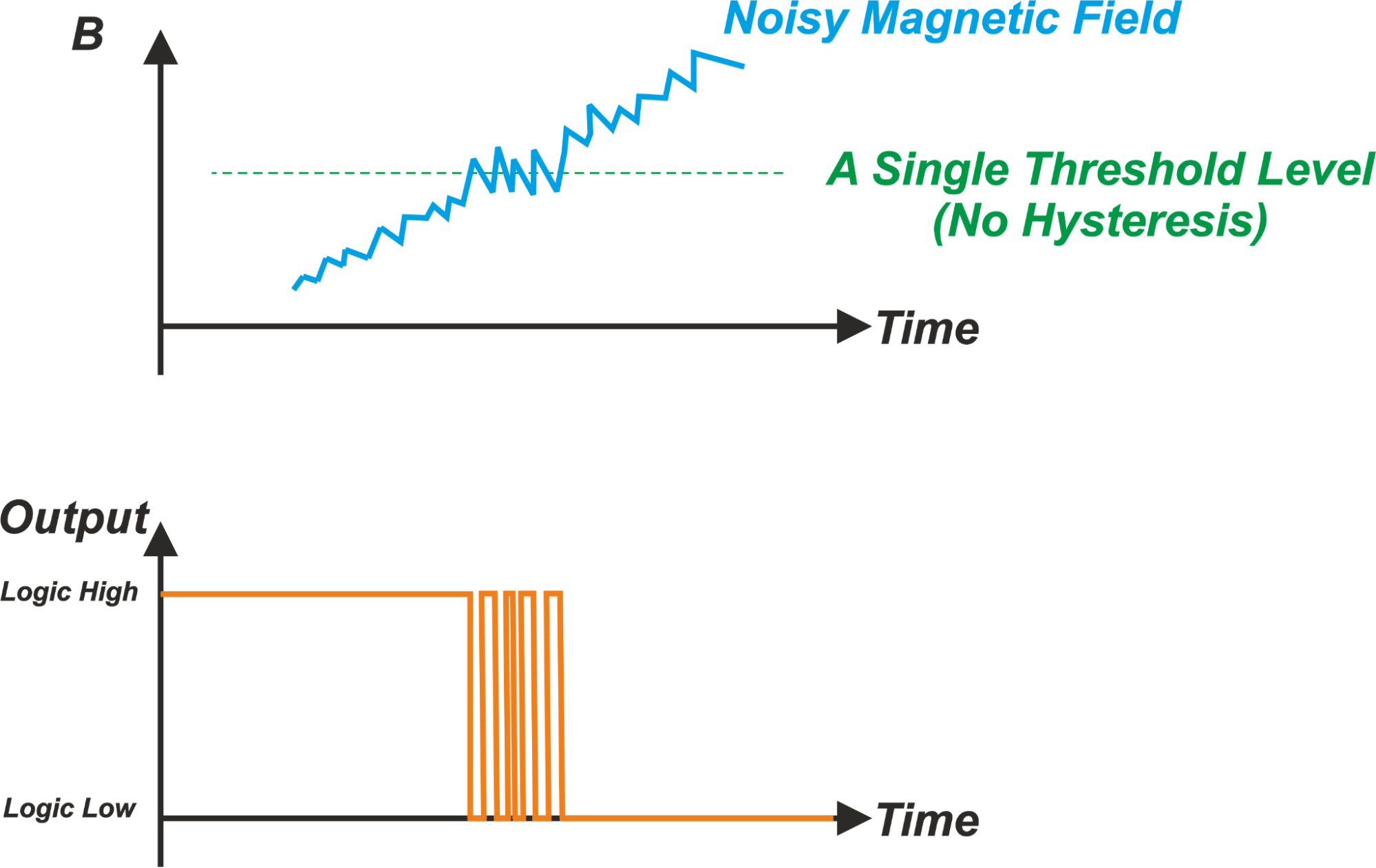
Figuur 4. Zonder hysterese kan de output rond de drempel onbepaald zijn.
Zoals we hierboven zagen, kan de werking van een unipolaire schakelaar worden beschreven door twee verschillende parameters:BOP en BRP . BOP staat voor het "magnetische werkpunt" of gewoon het "opereerpunt". Dit geeft het drempelniveau aan voor een toenemend magnetisch veld waarboven de sensor wordt ingeschakeld. BRP is het "magnetische vrijgavepunt" of gewoon het "loslaatpunt". Het geeft het drempelniveau aan voor een afnemend magnetisch veld. Voor B
BHYS =BOP − BRP
We zullen hieronder bespreken dat een vergelijkbare notatie kan worden gebruikt om de werking van de andere typen digitale Hall-apparaten te beschrijven.
Houd er rekening mee dat, afhankelijk van het elektronische ontwerp van de sensor, de aan- en uittoestanden van de sensoruitgang het tegenovergestelde kunnen zijn van die weergegeven in afbeelding 3 (logisch laag als het apparaat uit staat en logisch hoog als het aan staat).
Omnipolaire schakelaars
De overdrachtsfunctie van een omnipolaire schakelaar wordt getoond in figuur 5.
Figuur 5
Een omnipolaire schakelaar wordt ingeschakeld met een sterk positief veld of een sterk negatief veld. Zoals weergegeven in de afbeelding, wanneer de grootte van het magnetische veld groter wordt dan BOP (|B|> BOP ), schakelt het apparaat in en gaat de uitgang naar logisch laag. Wanneer de grootte van het B-veld kleiner wordt dan BRP (|B|
Hall-effectvergrendelingen
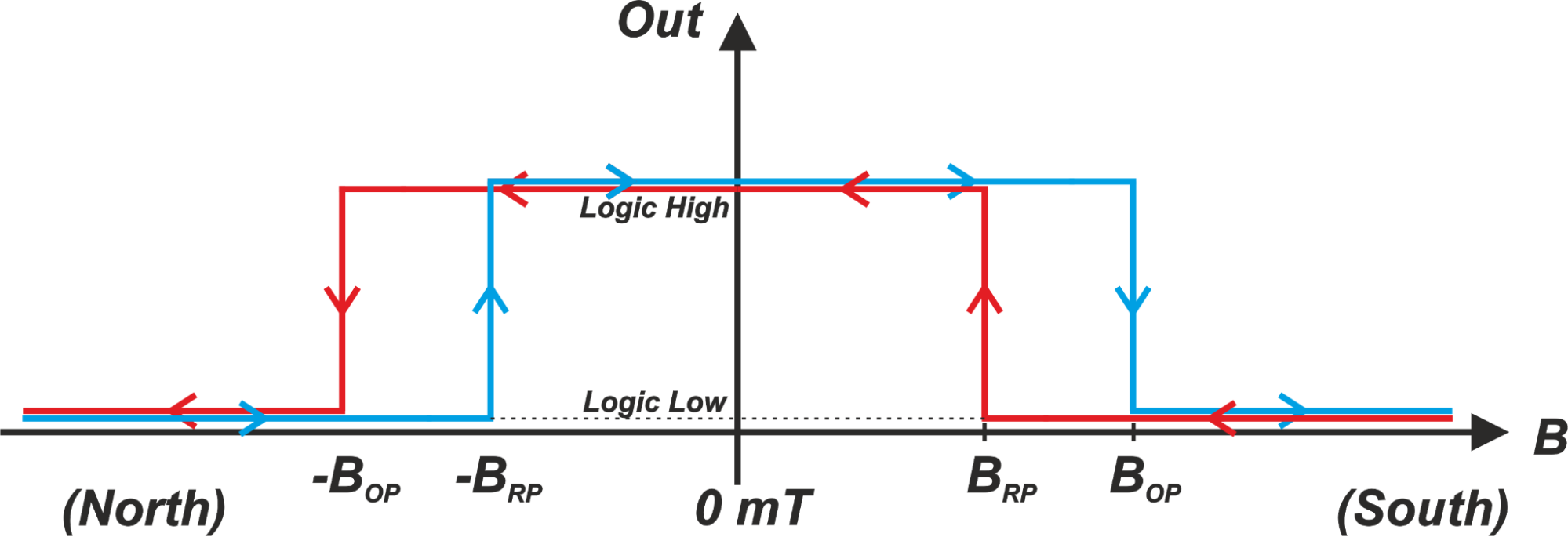
De overdrachtsfunctie van een Hall-effect-latch wordt getoond in figuur 6.
Figuur 6
Een vergrendelingsapparaat heeft een positieve BOP en een negatieve BRP . Het wordt ingeschakeld door een voldoende groot positief veld (B> BOP ) en gaat uit bij aanwezigheid van een voldoende sterk noordpoolveld (B
Terwijl een unipolaire of omnipolaire schakelaar van toestand kan veranderen als de amplitude van het aangelegde veld verandert, kan een vergrendeling de polariteit van het B-veld detecteren (op voorwaarde dat het aangelegde veld voldoende sterkte heeft). Vergrendelingen worden meestal gebruikt met ringmagneten in roterende toepassingen, bijvoorbeeld voor het detecteren van de positie van een roterende as. Dit wordt getoond in figuur 7.
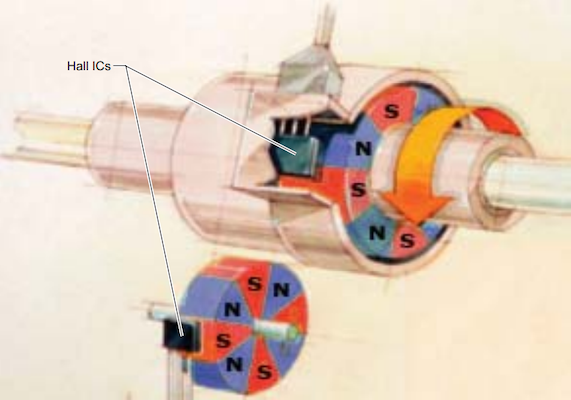
Figuur 7. Afbeelding met dank aan Allegro.
Terwijl de as draait, verandert de polariteit van het gedetecteerde magnetische veld en wordt de sensor dienovereenkomstig in-/uitgeschakeld. Bij een vergrendelingsapparaat zijn de bedienings- en vrijgavepunten even groot, maar hebben ze tegengestelde polariteiten (BOP ≠ -BRP ).
Bipolaire schakelaars
Bij een bipolaire schakelaar kennen we alleen de waarde van het "maximale" werkpunt en het "minimale" vrijgavepunt. De exacte drempelwaarden zijn echter niet bekend. Dientengevolge kan de exacte werking van de inrichting van eenheid tot eenheid veranderen. Afbeelding 8 toont een voorbeeld waarbij maximaal BOP is ongeveer 300 gauss en minimaal BRP is ongeveer -300 gauss.
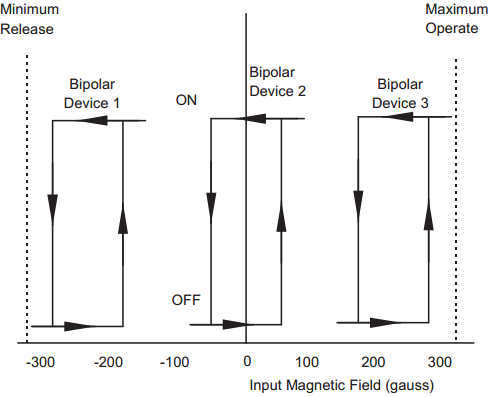
Figuur 8. Afbeelding met dank aan Honeywell.
Voor "Apparaat 1", beide BOP en BRP zijn negatief. Voor "Apparaat 3" zijn beide drempels positief. Een ander voorbeeld, "Apparaat 2", heeft een reactie die vergelijkbaar is met die van een vergrendeling. Het heeft een positieve BOP en negatieve BRP . Hoewel de overdrachtsfunctie van "Apparaat 2" lijkt op die van een vergrendeling, moet worden opgemerkt dat de bedienings- en vrijgavepunten van een bipolaire schakelaar mogelijk niet even groot zijn (BOP - BRP ).
Zoals u kunt zien, zijn drie verschillende overdrachtsfuncties mogelijk, zelfs voor apparaten van hetzelfde type die samen in hetzelfde lot zijn vervaardigd. Volgens de "Bipolar Switch Hall-Effect IC Basics'' applicatienota van Allegro, heeft slechts ongeveer 10% van de bipolaire schakelaars een overdrachtsfunctie die vergelijkbaar is met die van "Device 1" en "Device 3". De rest heeft een vergrendelingsreactie. Vergeleken met een vergrendelingsapparaat kan een bipolaire schakelaar een smallere hysteresezone bieden (BHYS =BOP − BRP ) en bijgevolg een hogere gevoeligheid. Aangezien de werkingsmodus van een bipolaire schakelaar echter van eenheid tot eenheid kan veranderen, moeten we ervoor zorgen dat het systeem correct werkt voor alle mogelijke waarden van BOP en BRP (binnen de gespecificeerde bereiklimieten).
Ga naar deze pagina om een volledige lijst van mijn artikelen te zien.
Sensor
- Elektrische velden en capaciteit
- Elektromagnetisme
- Magnetische meeteenheden
- Magnetische velden en inductie
- Kompassensor – Werking en toepassingen
- Fundamenten van digitale magnetische sensoren
- Apparaten versterken PoE-kracht via bestaande switches en kabels
- Standaard digitale camera en AI om bodemvocht te bewaken
- Magnetische velden detecteren
- Wat is magnetische afscherming?
- Hall-effectsensor begrijpen