


Inleiding tot capacitieve versnellingsmeters:versnelling meten met capacitieve detectie
In dit artikel bespreken we hoe je capacitieve detectie kunt gebruiken om versnelling te meten.
Versnellingsmeters vinden toepassing in verschillende toepassingsgebieden. In autotoepassingen worden bijvoorbeeld versnellingsmeters gebruikt om het airbagsysteem te activeren. Camera's gebruiken versnellingsmeters voor actieve stabilisatie van foto's. Computer harde schijven vertrouwen ook op versnellingsmeters om externe schokken te detecteren die de lees-/schrijfkop van het apparaat kunnen beschadigen. In dit geval onderbreekt de accelerometer de werking van de aandrijving wanneer er een externe schok optreedt. Dit zijn slechts enkele accelerometertoepassingen.
De mogelijkheden zijn eigenlijk eindeloos waarvoor deze apparaten kunnen worden gebruikt. De enorme vooruitgang in microfabricagetechnologieën hebben de huidige kleine, goedkope micromachined versnellingsmeters mogelijk gemaakt. In feite zijn het kleine formaat en de lage kosten twee van de belangrijkste factoren die ons in staat stellen deze apparaten voor zo'n breed spectrum aan toepassingen toe te passen.
In dit artikel zullen we kijken naar de fysica van het meten van versnelling. We zullen zien hoe een massa-veer-demper (ook bekend als een massa-demper-veer) structuur versnelling kan omzetten in een verplaatsingsgrootheid en hoe de capacitieve detectiebenadering kan worden toegepast om deze verplaatsing om te zetten in een elektrisch signaal dat evenredig is met de toegepaste versnelling.
Versnelling meten met behulp van een massa-veer-demper
Een massa-veer-demperstructuur zoals weergegeven in figuur 1 kan worden gebruikt om versnelling te meten.
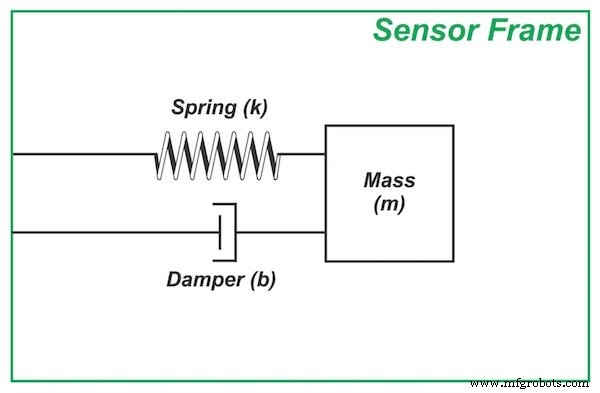
Figuur 1. De massa-veer-demper structuur
Een bekende hoeveelheid massa, gewoonlijk de proefmassa (of testmassa) genoemd, is via een veer verbonden met het sensorframe.
Hoewel de demper een essentieel onderdeel van dit systeem is, zullen we het uitstellen tot het volgende artikel in deze serie, omdat het misschien een beetje mysterieus is voor EE's en er misschien een paar alinea's nodig zijn om de basisconcepten van een demper te introduceren.
Laten we eens kijken hoe de structuur getoond in figuur 1 versnelling kan detecteren.
Wanneer het sensorframe versnelt vanwege een externe kracht, heeft de proefmassa de neiging om "achteruit te blijven" vanwege zijn traagheid. Dit verandert de relatieve positie van de proefmassa ten opzichte van het sensorframe zoals hieronder geïllustreerd.
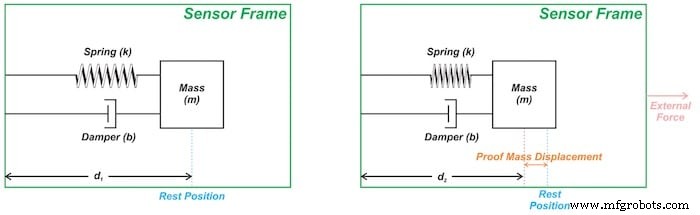
Figuur 2. (a) De proefmassa bevindt zich in de ruststand wanneer er geen externe kracht is. (b) Wanneer het frame naar rechts versnelt, neemt de waarnemer in het sensorframe waar dat de proefmassa naar de linkerkant van zijn rustpositie wordt verplaatst.
Figuur 2(a) toont de proefmassa in de ruststand wanneer er geen externe kracht is. Wanneer een externe kracht op het frame wordt uitgeoefend, zoals weergegeven in figuur 2(b), versnelt het frame naar rechts. De proefmassa heeft aanvankelijk de neiging in rust te blijven, waardoor de relatieve positie van de proefmassa ten opzichte van het frame verandert (d2
Een waarnemer in het niet-inertiële (dat wil zeggen versnellende) frame van de sensor neemt waar dat de proefmassa wordt verplaatst naar de linkerkant van zijn rustpositie. De veer wordt samengedrukt vanwege de verplaatsing van de proefmassa en oefent een kracht uit die evenredig is met de verplaatsing op de proefmassa. De kracht die door de veer wordt uitgeoefend, duwt de proefmassa naar rechts en laat deze versnellen in de richting van de externe kracht.
Als de juiste waarden worden gekozen voor de verschillende parameters van het systeem, zal de verplaatsing van de proefmassa evenredig zijn met de waarde van de frameversnelling (nadat de tijdelijke respons van het systeem uitsterft).
Samenvattend:een massa-veer-demperconstructie zet de versnelling van het sensorframe om in de bewijsmassaverplaatsing. De resterende vraag is:hoe kunnen we deze verplaatsing meten?
Het meten van de bewijsmassaverplaatsing:capacitieve detectiebenadering
De verplaatsing van de proefmassa kan op verschillende manieren worden gemeten. Een veelgebruikte methode is de capacitieve detectiebenadering die wordt weergegeven in figuur 3.
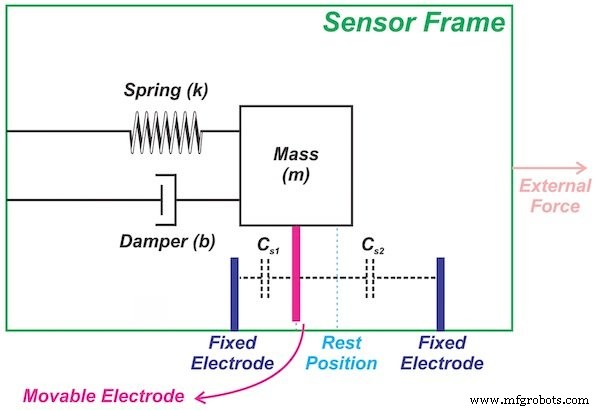
Figuur 3
Er zijn twee elektroden bevestigd aan het sensorframe, samen met een beweegbare elektrode die is verbonden met de proefmassa. Dit creëert twee condensatoren, Cs1 en Cs2 , zoals weergegeven in afbeelding 3.
Naarmate de proefmassa in één richting beweegt, neemt de capaciteit tussen de beweegbare elektrode en een van de vaste elektroden toe, terwijl de capaciteit van de andere condensator afneemt. Dit is de reden waarom we alleen de veranderingen in de detectiecondensatoren hoeven te meten om de verplaatsing van de bewijsmassa te detecteren, die evenredig is met de ingangsversnelling.
Signaalconditionering van de versnellingsmeter met behulp van synchrone demodulatie
Om de veranderingen in de detectiecondensatoren nauwkeurig te meten, kunnen we de synchrone demodulatietechniek toepassen. Afbeelding 4 toont een vereenvoudigde versie van de signaalconditionering die wordt gebruikt in de ADXL-familie van versnellingsmeters van Analog Devices.
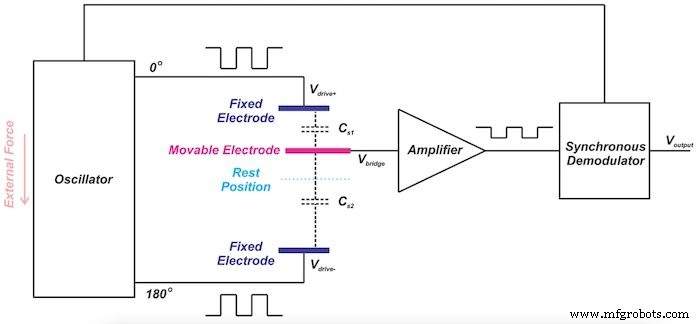
Figuur 4. Afbeelding (aangepast) met dank aan Analog Devices
In dit geval wordt een blokgolf van 1 MHz gebruikt als de AC-excitatie van de meetcondensatoren Cs1 en Cs2 . De op de vaste elektroden aangelegde blokgolven hebben dezelfde amplitude maar zijn 180° uit fase ten opzichte van elkaar. Wanneer de beweegbare elektrode zich in de ruststand bevindt, is de spanning aan de ingang van de versterker nul volt.
Wanneer de beweegbare elektrode dichter bij een van de vaste elektroden komt, verschijnt een groter deel van de excitatiespanning van die elektrode bij de versterkeringang Vbrug , wat betekent dat de blokgolf die verschijnt aan de ingang van de versterker in fase is met de excitatiespanning van de dichterbij gelegen elektrode.
In figuur 4 is de versterkte output bijvoorbeeld een blokgolf in fase met Vdrive+ omdat Cs1 is groter dan Cs2 .
De amplitude van Vbrug is een functie van de verplaatsing van de bewijsmassa; we moeten echter ook de faserelatie van Vbridge . kennen met betrekking tot Vdrive+ en Vdrive- om te bepalen in welke richting de proefmassa wordt verplaatst.
De synchrone demodulator vermenigvuldigt in feite de output van de versterker met de excitatiespanning (ofwel Vdrive+ of Vdrive- ) om de blokgolf aan de uitgang van de versterker om te zetten in een gelijkspanning die zowel de hoeveelheid verplaatsing als de richting aangeeft.
Om te leren hoe synchrone demodulatie dit bereikt, verwijzen wij u naar mijn artikel over LVDT-demodulatietechnieken:LVDT-demodulatie:gelijkrichtertype versus synchrone demodulatie.
Waarom gebruiken we geen enkele detectiecondensator?
De capacitieve detectie, weergegeven in figuur 3, heeft een differentieel karakter:wanneer Cs1 neemt toe, Cs2 neemt af, en vice versa.
Het is ook mogelijk om enkelzijdige capacitieve detectie te gebruiken waarbij een van de vaste elektroden wordt weggelaten, zodat er slechts één variabele condensator is. In dit geval kunnen we het systeem modelleren zoals weergegeven in figuur 5.
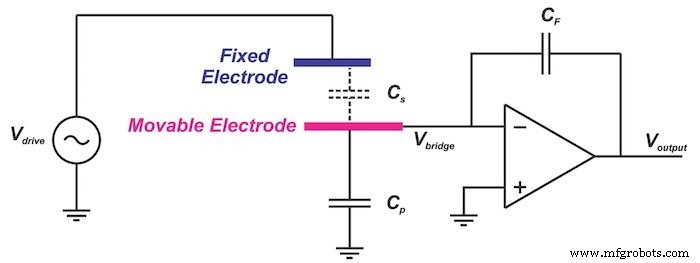
Figuur 5
Deze single-ended versie lijkt een eenvoudigere oplossing. Dus waarom gebruiken we geen enkele detectiecondensator?
Structuur met enkele detectiecondensator:niet-lineaire uitvoer
Laten we dit circuit eens nader bekijken.
In de bovenstaande afbeelding, Cp modelleert de totale parasitaire capaciteit van de beweegbare elektrode naar de grond. Idealiter Vbrug bevindt zich op het virtuele terrein en we kunnen Cp . negeren omdat het aan de ene kant aarde heeft en aan de andere kant virtuele aarde.
Daarom kan de uitvoer eenvoudig worden verkregen als:
\[ V_{output} =-\frac{C_s}{C_F} V_{drive}\]
Vergelijking 1
Merk op dat het pad van de instelstroom niet wordt getoond in figuur 5. Met behulp van de basisvergelijking van de condensator kunnen we de output uitdrukken in termen van de bewijsmassaverplaatsing.
Voor een condensator C hebben we:
\[ C =\epsilon \frac{A}{d}\]
Vergelijking 2
waarbij ε de diëlektrische permittiviteit is, A het parallelle plaatoppervlak is en d de afstand tussen de twee geleidende platen. Neem voor de eenvoud aan dat de twee condensatoren Cs en CF hebben dezelfde ε en A.
Vergelijking 1 kan dan worden vereenvoudigd tot:
\[ V_{output} =-\frac{d_F}{d_s} V_{drive}\]
waar dF en ds geef de afstand aan tussen de elektroden van CF en Cs , respectievelijk. ds kan worden uitgedrukt als de som van een initiële afstand d0 en de verplaatsingswaarde Δd.
Van daaruit kunnen we verkrijgen:
\[ V_{output} =-\frac{d_F}{d_0 + \Delta d} V_{drive}\]
Zoals je kunt zien, staat de verplaatsingsterm (Δd) in de noemer van de uitvoervergelijking. De output is dus een niet-lineaire functie van de bewijsmassaverplaatsing Δd.
Differentiële structuur:lineaire output
Laten we eens kijken naar de overdrachtsfunctie van de differentiële capacitieve detectie weergegeven in figuur 4.
U kunt verifiëren dat, met differentiële capacitieve detectie, Vbridge wordt gegeven door:
\[ V_{bridge} =\frac{C_{s1} V_{drive+} + C_{s2} V_{drive-}}{C_{s1} + C_{s2 }} \]
Vergelijking 2 toepassen en aannemen dat de twee condensatoren Cs1 en Cs2 dezelfde ε- en A-waarden hebben, verkrijgen we:
\[ V_{bridge} =\frac{d_{s2} V_{drive+} + s_{s1} V_{drive-}}{d_{s1} + d_{s2 }} \]
Vergelijking 3
waar ds1 en ds2 geef de afstand aan tussen de elektroden van Cs1 en Cs2 , respectievelijk. Wanneer ds1 neemt toe, ds2 vermindert met hetzelfde bedrag en vice versa.
Ervan uitgaande dat:
\[ d_{s1} =d_0 - \Delta d \]
\[ d_{s2} =d_0 + \Delta d \]
\[ V_{drive+} =- V_{drive-} \]
Vergelijking 3 vereenvoudigt tot:
\[ V_{bridge} =\frac{\Delta d}{d_0} V_{drive+} \]
Zoals je kunt zien, is de uitgangsspanning met een differentiële structuur een lineaire functie van de bewijsmassaverplaatsing Δd. Merk op dat, hoewel we software zouden kunnen gebruiken om de sensorlineariteitsfouten te verwijderen, een lineaire respons wenselijk is, omdat dit de meetnauwkeurigheid verhoogt en systeemkalibratie vergemakkelijkt.
Conclusie
We hebben gezien hoe een massa-veer-demperstructuur versnelling kan omzetten in een verplaatsingsgrootheid en hoe de capacitieve detectiebenadering kan worden toegepast om deze verplaatsing om te zetten in een elektrisch signaal dat evenredig is aan de toegepaste versnelling.
We hebben ook kort vermeld dat, om ervoor te zorgen dat de verplaatsing van de bewijsmassa evenredig is met de toegepaste versnelling, verschillende parameters van het massa-veer-dempersysteem op de juiste manier moeten worden gekozen.
In het volgende artikel zullen we de overdrachtsfunctie van het massa-veer-dempersysteem afleiden om een dieper inzicht te krijgen in de werking van het systeem.
Ga naar deze pagina om een volledige lijst van mijn artikelen te zien.
Sensor
- Een inleiding tot 3D-printen met plastic
- Een inleiding tot 3D-printen met selectief lasersinteren
- Truphone maakt massale IoT-implementaties mogelijk met iSim-samenwerking
- Würth:3-assige versnellingssensor met vooraf ingestelde functionaliteiten
- Temperatuur meten met RASPBERRY PI
- Kan je niet omgaan met een massa klachten van klanten? AI to the Rescue
- Universele tactiele detectie met elektromechanisch gekoppelde geleiders
- Op laserlicht gebaseerde versnellingsmeter
- Snelheid of acceleratie? wat is belangrijker bij waterstraalsnijden?
- Een inleiding tot puntlasapparaat met capacitieve ontlading
- CNC-gereedschapsvoorinstelling en CNC-gereedschapsmeting en inleiding